








方案详情
文
We present in this paper a novel collaborative scheme
dedicated to the measurement of velocity in fluid experimental
flows through image sequences. The proposed technique
combine the robustness of correlation techniques with
the high density of global variational methods. It can be considered
either as a reenforcement of fluid dedicated opticalflow
methods towards robustness, or as an enhancement of
correlation approachs towards dense information. This results
in a technique that is robust under noise and outliers,
while providing a dense motion field. The method was applied
on synthetic images and on real experiments in turbulent
flows carried out to allow a thorough comparison with a
state of the art optical-flow and PIV methods.
方案详情

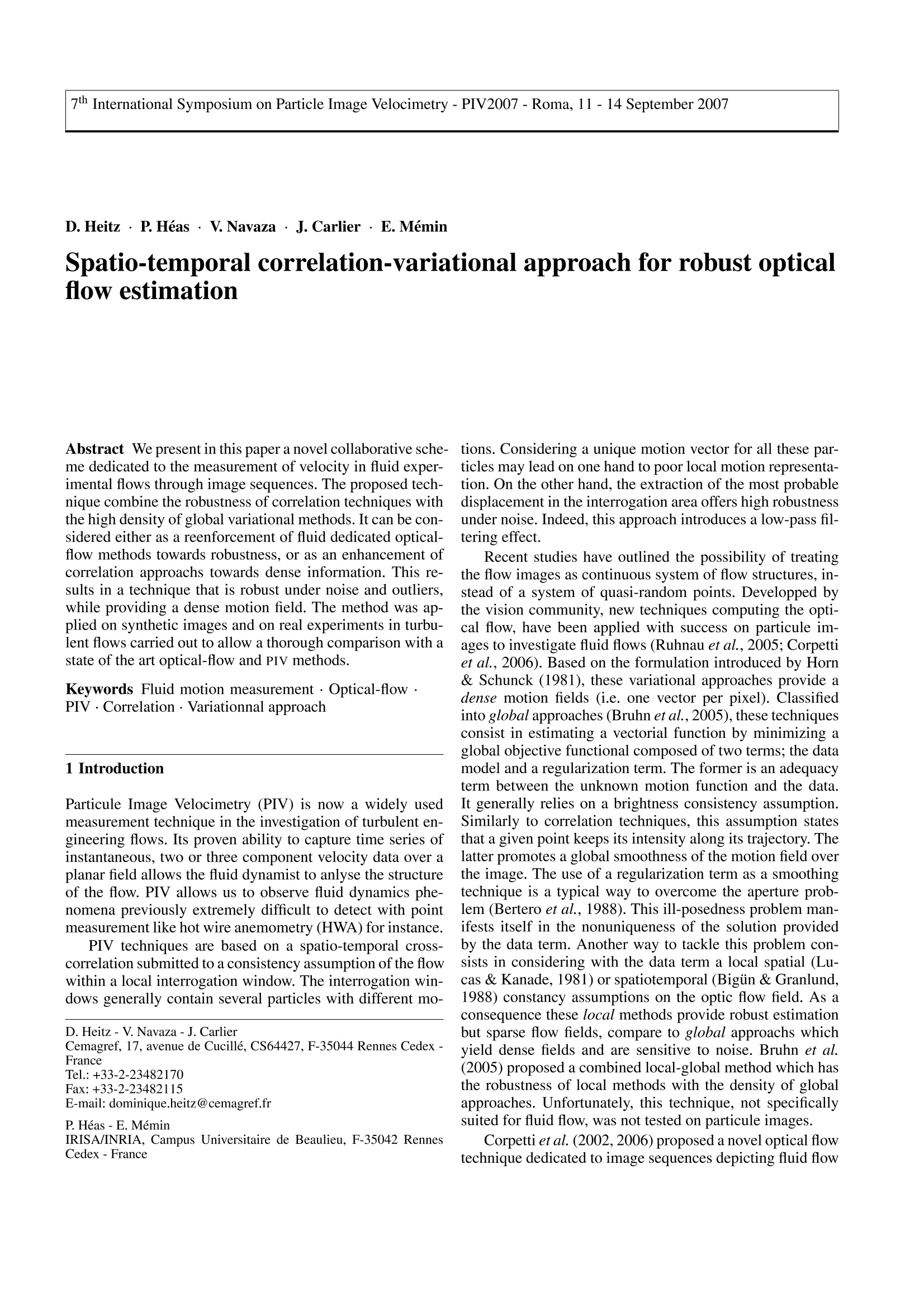
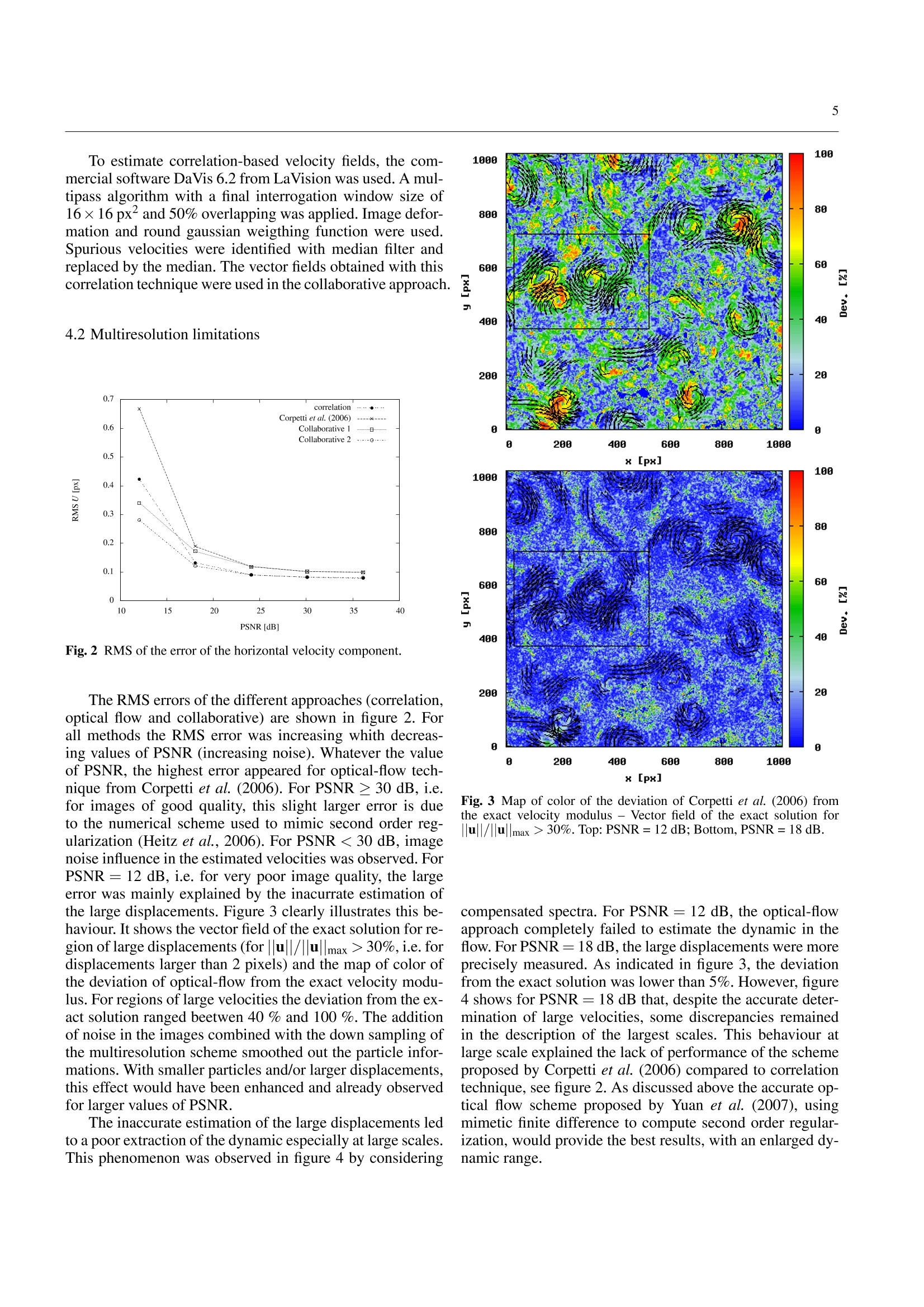
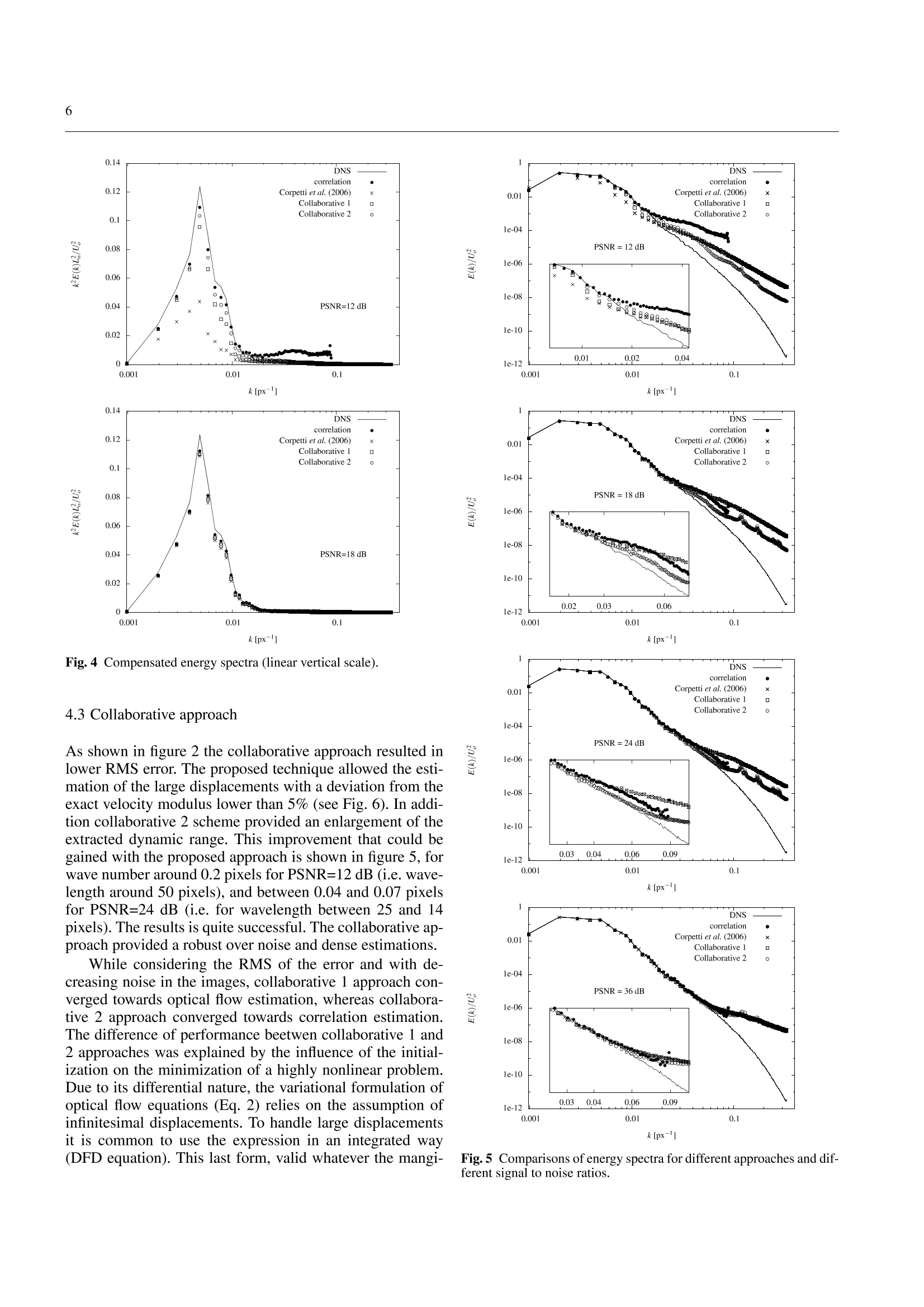
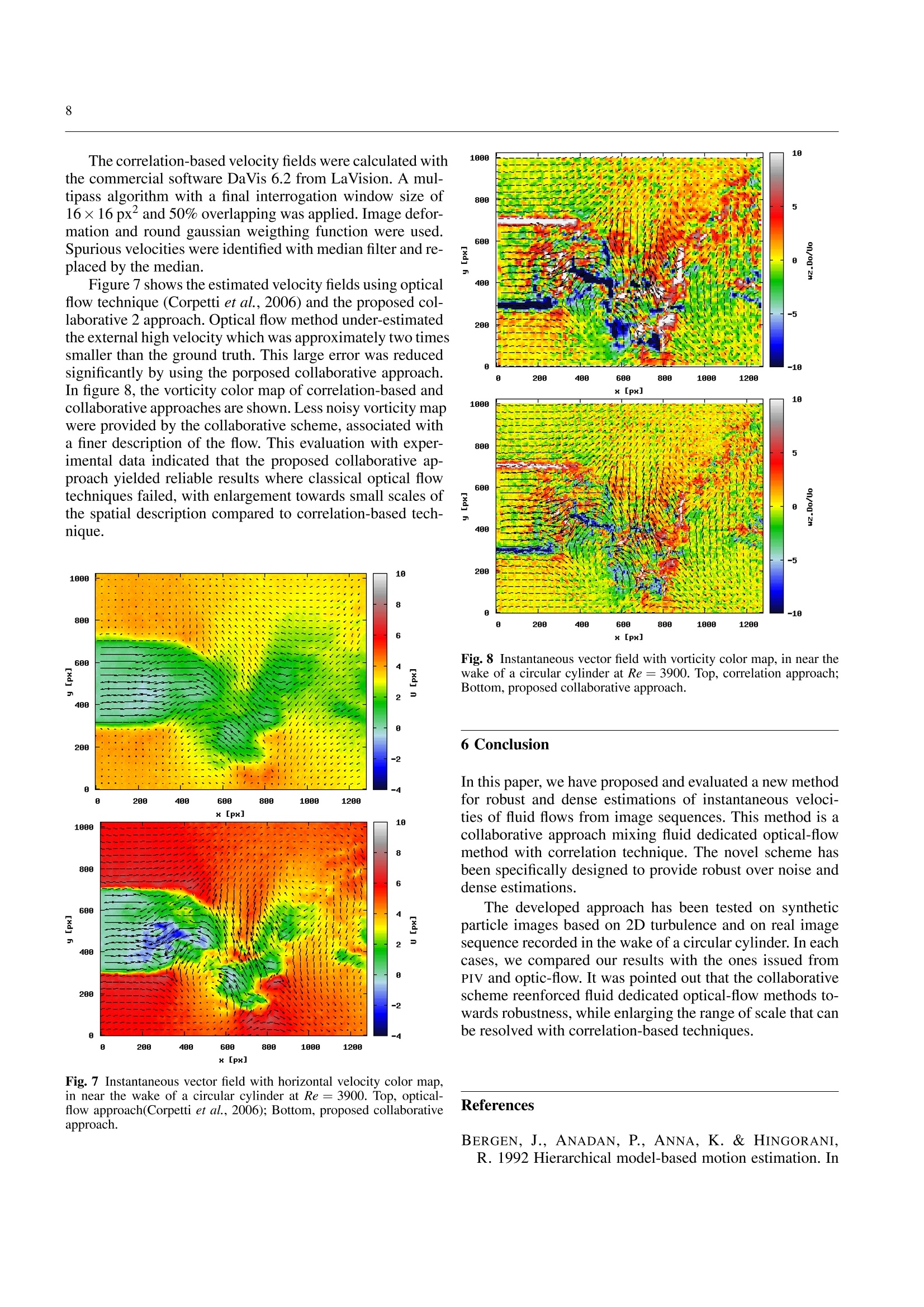
7th International Symposium on Particle Image Velocimetry-PIV2007-Roma, 11- 14 September 2007 2 D. Heitz · P. Heas · V. Navaza · J.Carlier· E. Memin Spatio-temporal correlation-variational approach for robust opticalflow estimation me dedicated to the measurement of velocity in fluid exper-[-imental flows through image sequences. The proposed tech-nique combine the robustness of correlation techniques withthe high density of global variational methods. It can be con-sidered either as a reenforcement of fluid dedicated optical-flow methods towards robustness, or as an enhancement ofcorrelation approachs towards dense information. This re-sults in a technique that is robust under noise and outliers,while providing a dense motion field. The method was ap--plied on synthetic images and on real experiments in turbu-lent flows carried out to allow a thorough comparison with astate of the art optical-flow and PIV methods. Abstract We present in this paper a novel collaborative sche- tions. Considering a unique motion vector for all these par-ticles may lead on one hand to poor local motion representa-tion. On the other hand, the extraction of the most probabledisplacement in the interrogation area offers high robustnessunder noise. Indeed, this approach introduces a low-pass fil-tering effect. Keywords Fluid motion measurement ·Optical-flow ·PIV·Correlation· Variationnal approach 1 Introduction Particule Image Velocimetry (PIV) is now a widely usedmeasurement technique in the investigation of turbulent en-gineering flows. Its proven ability to capture time series ofinstantaneous, two or three component velocity data over aplanar field allows the fluid dynamist to anlyse the structureof the flow. PIV allows us to observe fluid dynamics phe-nomena previously extremely difficult to detect with pointmeasurement like hot wire anemometry (HWA) for instance. PIV techniques are based on a spatio-temporal cross-correlation submitted to a consistency assumption of the flowwithin a local interrogation window. The interrogation win-dows generally contain several particles with different mo- ( D. Heitz -V.Navaza- J . CarlierCemagref, 17, avenue d e Cucille, CS64427, F-35044 Rennes Cedex - France Tr ) Tel.:+33-2-23482170 Fax: +33-2-23482115 E-mail: dominique.heitz@cemagref.fr P. Heas -E. Memin IRISA/INRIA, Campus Universitaire de Beaulieu, F-35042 RennesCedex -France Recent studies have outlined the possibility of treatingthe flow images as continuous system of flow structures, in-stead of a system of quasi-random points. Developped bythe vision community, new techniques computing the opti-cal flow, have been applied with success on particule im-ages to investigate fluid flows (Ruhnau et al., 2005; Corpettiet al., 2006). Based on the formulation introduced by Horn& Schunck (1981), these variational approaches provide adense motion fields (i.e. one vector per pixel). Classifiedinto global approaches (Bruhn et al., 2005), thesetechniquesconsist in estimating a vectorial function by minimizing aglobal objective functional composed of two terms; the datamodel and a regularization term. The former is an adequacyterm between the unknown motion function and the data.It generally relies on a brightness consistency assumption.Similarly to correlation techniques, this assumption statesthat a given point keeps its intensity along its trajectory. Thelatter promotes a global smoothness of the motion field overthe image. The use of a regularization term as a smoothingtechnique is a typical way to overcome the aperture prob-lem (Bertero et al., 1988). This ill-posedness problem man-ifests itself in the nonuniqueness of the solution providedby the data term. Another way to tackle this problem con-sists in considering with the data term a local spatial (Lu-cas & Kanade, 1981) or spatiotemporal (Bigiin & Granlund,1988) constancy assumptions on the optic flow field. As aconsequence these local methods provide robust estimationbut sparse flow fields, compare to global approachs whichyield dense fields and are sensitive to noise. Bruhn et al.(2005) proposed a combined local-global method which hasthe robustness of local methods with the density of globalapproaches. Unfortunately, this technique, not specificallysuited for fluid flow, was not tested on particule images. Corpetti et al. (2002,2006) proposed a novel optical flowtechnique dedicated to image sequences depicting fluid flow phenomena. This specialized optical-flow estimator relies onan adaptation of the functional observation and regulariza-tion terms. Instead of sticking to the intensity conservationassumption, the data-model considered relies on the continu-ity equation as a more physically-grounded alternative. Asfor the regularization, a second-order regularizer is used topreserve completely the divergence and vorticity structuresof the flows. Using a div-curl formalism, a second-order reg-ularizer is introduced to capture the divergence and vorticityof the unknown flow. To handle large displacements the data term is generallyused in a integrated way, linearized around a previous esti-mate and embedded within a multiresolution coarse-to-finescheme (Bergen et al., 1992). Standart multiresolution ap-proach consists in deriving the original frame into a pyra-mid of images, by successive low-pass filtering (Gaussiansmoothing) and regular subsampling by a factor of two ineach direction. The created pyramid structure then allowsmultiscale motion estimation by incremental procedure. Lowresolution components are estimated at coarsest level andthen refined step by step: at a resolution level, an incrementvelocity field is estimated around the projection (by dupli-cation or interpolation) of the final estimate at previous res-olution level. In general the procedure of filtering and sub-sampling leeds to a loss of information. The proper choiceof filter depends not only on the sampling theorem but alsoon the distribution of the energy of the image spectrum. In the case of particule images of turbulent fluid flows,small particules with large velocities, can be smoothed outby the multiresolution procedure. Therefore, due to this lossof information, the optical flow approach will not extract thetrue velocity. Indeed, within the energy minimization frame-work, finding the global minimum of the cost function willbe tricky if the initialization is wrong or far from the min-imum. In case of robust estimation the problem will be in-creased since robust estimation leads most of the time to aglobal nonlinear minimization in presence of numerous lo-cal minima. In region with a low density of particules and acertain amount of noise in the image or with a poor range ofgrey level, the multiresolution procedure will enhance theimpact of the noise on the result. Indeed, at the coarsestlevel, the subsampling process keeps statistically more noisethan particule information when there is poor particule den-sity and noise in the original image. In this paper, we propose to design a novel approach thatcombine the robustness of correlation techniques with thehigh density of global variational methods. This results in atechnique that is robust under noise and outliers, while pro-)-viding a dense motion field. This article is organized as follows. In a first section, wepresent the fluid dedicated global approachs. Then, in a sec-ond section, we present the collaborative approach. In a lastpart, results from synthetic images based on a DNS of 2Dturbulence, and real images in the wake of a circular cylin-der, are presented and analysed. We provide some elementsof comparison of our method with standart optical flow tech-niques. 2 Multiscale motion estimation 2.1 Classical method The apparent motion, perceived through variations of imageintensity I is called optical flow in the computer vision com-munity. All optical flow estimation methods rely on the tem-poral conservation of some invariants. The most commonones are photometric ones which can easily be extracted andmay lead to dense measurements. In the case of PIV imageryfor bi-dimensional flows visualization, the gray level con-stancy assumption can be assumed. Let us denote by s thespatial coordinates (x,y) and by u(s) the apparent motionfield at this point and at a given time t. This invariant leadsto an integrated non-linear formulation called the DisplacedFrame Difference (DFD) equation I(s+u(s),t+1)=I(s,t),or at time t, to a linear differential formulation called the Op-tical Flow Constraint (OFC) equation u(s).VI(s)+I(s)=0. These two formulations can not be used alone, as theyprovide only one equation for two unknowns at each spatio-temporal location (s,t). This is the well known aperture prob-lem where the so called normal flow is estimated while thetangential velocity component remains undetermined. In or-der to remove this ambiguity and robustify the estimation,one must rely on other assumptions. The main used assump-tion is spatial local coherence. This assumption may be ex-pressed as a regularity prior on velocity field spatial smooth-ness. A very common approach used with PIV imagery is corre-lation-based matching, which corresponds to the DFD con-straint associated to a locally constant field within a neigh-borhoods W(s). Thus, using a discrete space of vectors{w},the velocityu at point s is obtained as where6(.) denotes a dissimilarity function. On the one hand,these approaches suffer from several deficiencies : traceablefeatures must be sufficiently contrasted and must persist overtime on consecutive images.Furthermore, the estimation proneto erroneous spatial variability, which can be reduced withthe use of filters. On the other hand, these techniques consti-tute very fast methods and are generally locally very robustto noise. These techniques are based on disjoint local estima-tion, and thus produce sparse vector fields estimated locallyand independently. 2.2 Fluid dedicated optical flow method Alternate approaches are optical flow estimators derived inthe framework of Horn & Schunck (1981) methodology. Theyhave the great advantage of producing dense vector fields.They are based on the minimization of an energy functionJ=Ja+J, composed of two terms. The first term Ja is calledthe data term and implements the OFC equation The penalty function is usually the L2 norm but it may bechanged to a robust function attenuating the effect of datathat deviate significantly from the OFC (Black & Anandan,1996). The second term J, is called the regularization term.It is usually a standard first-order spatial smoothness term Jr(u)=a0( Vu )ds, where a>0 is a parame-ter controlling the balance between the smoothness and theglobal adequacy to the brightness constancy assumption. Func-_tion 0 may be the quadratic penalty if the searched solu-tion is smooth everywhere or a robust norm function if onewants to handle implicitly the spatial discontinuities of thefield (Black & Anandan,1996). However in the case of fluidflows, it can be demonstrated that a first order regularizationis not adapted as it favors the estimation of velocity fieldswith low vorticity. A second order regularization can advan-tageously be consider as proposed in (Suter, 1994) : where 5=curlu=-and=divu=+ standfor the vorticity and divergence of the apparent velocity u=(u,v). Note that in the case of bi-dimensional incompress-ible flows, divergence of the apparent motion is equal tozero. To circumvent the difficulty of implementing secondorder smoothness constraint, this regularization term can besimplified in a computational point of view in two inter-leaved first-order div-curl regularizations based on an aux-iliary variablei and Siapproximating the vorticity and thedivergence of the flow (Corpetti et al.,2002,2006). Thus wehave : where is a positive regularization parameter. 2.3 Multiresolution approach However, one major problem with optical flow estimators islarge displacement estimation. The intensity function mustbe locally sufficiently close to a linear function. Since thelarger the displacement the more narrow the linearity do-main is, large displacements can not be recovered directly. Acommon way to overcome this limitation is to create a imagepyramid, constructed by successive low-pass filtering anddown sampling of the original images. In this framework,principal components of displacements are first estimated atcoarse resolution where motion amplitude should be suffi-ciently reduced in order to satisfy the linearity requirement.L.Incremental displacement are then estimated while goingdown the pyramid, and the solution is refined (Bergen et al.,1992). However, since the multiresolution schemes esti-mates principal component displacements only at coarse res-olutions where small structures are rubbed out, this approach enables the characterization of large displacements of smallstructures only in the case when their motion are close enoughto the principal component’s one. Another disadvantage char-acterizing the method is the additional noise incorporationdue to the calculation of motion-compensated images at eachresolution by the use of interpolation methods. 3 Collaborative correlation-optical flow scheme To overcome the multiresolution limitations, we propose analternative approach relying on a unique representation ofthe full resolution image. Thus, the proposed method tack-les the non-linear estimation problem without making suc-cessive approximations in the calculation of interpolated im-ages nor restricting itself to the characterization of large dis-placements of sufficiently large structures. The proposed me-thod takes advantage of the non-linear formulation of themotion estimation problem within a differential frameworkappropriated for globalized local smoothings. More explic-itly, large displacements of both, fine or large structures, canbe recovered by correlation-based methods for sufficientlycontrasted and persisting image regions. Thus, the idea ofthe method is to replace the coarse estimates of the multires-olution scheme by a dense large scale displacement estimatederived from a collection of correlation-based vectors ue ob-tained by Eq.1. The displacement field d is decomposed into a large scaleu and a small scale u’displacement field:d=u+u’. Thisdecomposition is used to define a new functional for estima-tion of variables u and u’ where Je(.) is the energy function constraining large scaleestimated displacements u to be close to a sparse correlation-based vector field uc. Thus, functional Je(.) is defined as aquadratic distance between the solution and a collection ofcorrelation-based vectors ul=(u',v) located at the points'= (x,y) and influencing their neighborhood according toa shifted bi-dimensional Gaussian law N'(s'-s) of vari-ance o In the previous expression, g'and y denote respectively con-fidence factors and the functional weighting factor. i- Two different collaborative schemes were evaluated inthe following. Collaborative 1 scheme, involves two steps.The minimization problem is conducted sequentially. In afirst step, large scale displacements u are estimated whilethe variable u' is fixed to zero. Thus, Eq.6 reduces to J(ū)=Ja(I,ū)+J,(u)+Jc(u,uc). Here, an analogous version ofthe alternate multigrid minimization scheme proposed in Cor-petti et al. (2002);Memin & Perez. (2002) is derived, theonly difference being in the Gauss-Seidel solver for variable u estimation. Once the minimum has been reached, a secondrefinement step is launched :the small scales displacementincrements u' are estimated while the variable ū is frozen.More explicitly,ū is used to derive a motion-compensatedexpression of the data model Ja(.) and to express the div-curlregularizer in terms of the displacement increment d -u.As functional Jc(.) does not depend on the small scale dis-placement increments, it is removed. Consequently, for thisrefinement step, we recover the fluid-dedicated estimator de-fined in Corpetti et al.(2002,2006).Collaborative 2 schemeinvolves one step. ū and u’ are estimated at the same timewith eq.6. 4 Numerical evaluation 4.1 Synthetic image sequence To evaluate the performanec of the collaborative approachcompare to state of the art optical-flow and correlation ap-proaches, a synthetic particle image sequence was generatedbased on the direct numerical simulation (DNS) of 2D turbu-lent flow (Carlier & Wieneke, 2005). The present flow con-tains typical difficulties for image based measurements tech-niques, like high velocity gradients and large dynamic range.The Reynolds number based on a characteristic length scalewas equal to 30 000. Figure 1 presents the whole flow do-main and the region considered for a thorough comparison. The image sequence was generated with a home-madeparticle image generator involving comparable methods thanthose developed for the EUROPIV Synthetic Image Gener-ator (Lecordier & Westerweel, 2003). A velocity-vorticityformulation of the Navier-Stokes equations was adopted forthe DNS. The vorticity equation was solved in Fourier spaceusing dealiased Fourier expansions in two directions withperiodic boundary conditions. The time integration was third-order/three steps with a Runge-Kutta scheme. The code iscalled pseudo-spectral. The coordinates of each particuleswere calculated in the physical space inside the vorticityequation computation using the Runge-Kutta scheme of theDNS in order to use the intermediate velocity components.However, a bicubic interpolation of the velocity field wasapplied since the particles were not supposed to be locatedat the nodes of the grid. In the present evaluation the image pair considered ledto a maximum particle image displacement up to 6 px. Thisparticle image displacement was globally optimum to mini-mize the RMS error provided by the optical flow technique.This relatively small maximum displacement necessitates amultiresolution pyramid with only two levels. However, theaddition of noise in the image pairs enables to put optical-1-flow technique,involving multiresolution scheme, on the wrongtrack. In order to provide more realistic conditions the signalto noise ratio was increased, simulating a reduction of thepower of the virtual laser. The noise wase quantified withpeak signal-to-noise ratio (PSNR) which is the ratio between Fig. 1 2D turbulence test case-Color map of the normalized vorticitywith superposed velocity field. the maximum possible power of a signal and the power ofcorrupting noise that affects the fidelity of its representa-tion. Because many signals have a very wide dynamic range,PSNR is usually expressed in terms of the logarithmic deci-bel scale. The PSNR is most commonly used as a measure ofquality of reconstruction in image compression. The PSNRis defined as: where d is the dynamic of the grey level of the signal, herethe particles. For an image where the particle are respre-sented over 8 bits d=28-1=255.MSE is the mean squarederror, which for two m ×n images Io and Ir where one of theimages is considered a noisy approximation of the other, isdefined as: To estimate correlation-based velocity fields, the com-mercial software DaVis 6.2 from LaVision was used. A mul-tipass algorithm with a final interrogation window size of16×16 px and 50% overlapping was applied. Image defor-mation and round gaussian weigthing function were used.Spurious velocities were identified with median filter andreplaced by the median. The vector fields obtained with thiscorrelation technique were used in the collaborative approach. 4.2 Multiresolution limitations Fig. 2RMS of the error of the horizontal velocity component. The RMS errors of the different approaches (correlation,optical flow and collaborative) are shown in figure 2. Forall methods the RMS error was increasing whith decreas-ing values of PSNR (increasing noise). Whatever the valueof PSNR, the highest error appeared for optical-flow tech-nique from Corpetti et al. (2006). For PSNR ≥ 30 dB, i.e.for images of good quality, this slight larger error is dueto the numerical scheme used to mimic second order reg-ularization (Heitz et al., 2006). For PSNR <30 dB, imagenoise influence in the estimated velocities was observed. ForPSNR= 12 dB, i.e. for very poor image quality, the largeerror was mainly explained by the inacurrate estimation ofthe large displacements. Figure 3 clearly illustrates this be-haviour. It shows the vector field of the exact solution for re-gion of large displacements (forul/llu max > 30%,i.e. fordisplacements larger than 2 pixels) and the map of color ofthe deviation of optical-flow from the exact velocity modu-lus. For regions of large velocities the deviation from the ex-act solution ranged beetwen 40 % and 100 %. The additionof noise in the images combined with the down sampling ofthe multiresolution scheme smoothed out the particle infor-mations. With smaller particles and/or larger displacements,this effect would have been enhanced and already observedfor larger values of PSNR. The inaccurate estimation of the large displacements ledto a poor extraction of the dynamic especially at large scales.This phenomenon was observed in figure 4 by considering x[px] Fig. 3 Map of color of the deviation of Corpetti et al. (2006) fromthe exact velocity modulus - Vector field of the exact solution foru/u max > 30%. Top: PSNR= 12 dB; Bottom, PSNR=18 dB. compensated spectra. For PSNR= 12 dB, the optical-flowapproach completely failed to estimate the dynamic in theflow. For PSNR=18 dB, the large displacements were moreprecisely measured. As indicated in figure 3, the deviationfrom the exact solution was lower than 5%. However, figure4 shows for PSNR= 18 dB that, despite the accurate deter-mination of large velocities, some discrepancies remainedin the description of the largest scales. This behaviour atlarge scale explained the lack of performance of the schemeproposed by Corpetti et al. (2006) compared to correlationtechnique, see figure 2. As discussed above the accurate optical flow scheme proposed by Yuan et al. (2007), usingmimetic finite difference to compute second order regular-ization, would provide the best results, with an enlarged dy-namic range. Fig. 4 Compensated energy spectra (linear vertical scale). 4.3 Collaborative approach As shown in figure 2 the collaborative approach resulted inlower RMS error. The proposed technique allowed the esti-mation of the large displacements with a deviation from theexact velocity modulus lower than 5% (see Fig. 6). In addi-tion collaborative 2 scheme provided an enlargement of theextracted dynamic range. This improvement that could begained with the proposed approach is shown in figure 5, forwave number around 0.2 pixels for PSNR=12 dB (i.e. wave-length around 50 pixels), and between 0.04 and 0.07 pixelsfor PSNR=24 dB (i.e. for wavelength between 25 and 14pixels). The results is quite successful. The collaborative ap-proach provided a robust over noise and dense estimations. While considering the RMS of the error and with de-creasing noise in the images, collaborative 1 approach con-verged towards optical flow estimation, whereas collabora-tive 2 approach converged towards correlation estimation.The difference of performance beetwen collaborative 1 and2 approaches was explained by the influence of the initial-ization on the minimization of a highly nonlinear problem.Due to its differential nature, the variational formulation ofoptical flow equations (Eq. 2) relies on the assumption ofinfinitesimal displacements. To handle large displacementsit is common to use the expression in an integrated way(DFD equation). This last form, valid whatever the mangi- k [px-l] tude of the displacement be, is however highly nonlinear inthe unknown vector. Hence, most of the time the expressionis linearized around a previous estimate and embedded ina multiresolution scheme. In the proposed collaborative ap-proach, the coarse estimates of the multiresolution schemewas replaced by the large displacements u constrained to beclose to a sparse correlation-based vector fielduc, the result-ing small displacement field u’, beingsupposed to be suffi-ciently small to satisfy the intrinsic assumption of the vari-ational formulation. However, in practice correlation-basedtechnique acts as a low-pass filtering process with the addi-tion of some errors, depending on the experimental condi-tions. As a consequence, the resulting field, correspondingto the supposed small displacements u'to be estimated, caninclude some large displacements. In the present turbulentflow considered, since curvature and gradient effects (Hain& Kahler, 2007) associated with noise led to error in themeasured vector field, the resulting velocity field includedlarge displacements compared to the assumption of smalllinear displacements. Furthermore, since the nonlinearity ofthe minimization problem is high, it needs proper startingvalues to not get stuck into local minimums and find theglobal minimum. For collaborative 1 scheme, the vector fieldu’was estimated without any prior knowledge for the start-ing values. Whereas, for collaborative 2 scheme, u’ and uwere estimated at the same time, leading to the estimationof d=u+u’ with the correlation-based vector field ue asinitial values. In addition, with collaborative 1 scheme thesmall scale vector field u' was regularized, whereas with col-laborative 2 scheme the full vector field d was regularized,which provides more accurate estimations. 5 Experimental evaluation The collaborative approach was also applied to a PIV imagesequence recorded in one of the wind tunnels of the Rennesregional Center of the Cemagref. The sequence shows thenear wake flow of a circular cylinder at Reynolds numberRe=3900. The circular cylinder had a length L= 280 mm and adiameter D= 12 mm. It was equipped with two thin rect-angular end plates with the specification recommended byStansby (1974). The distance between the end-plates was240 mm providing an aspect ratio L/D=20. The blockageratio was 4.3%. The circular cylinder was mounted horizon-tally at 3.5D from the entrance of the testing zone. The free-stream velocity was adjusted at 4.8 m.s-1. 2D2C PIV experiments were carried out with a LaVi-sion commercial system including a New Wave laser Solo 3Nd-YAG (Energy by pulse of 50 mJ) and 2 PCO camerasSensiCam (CCD size of 1280×1024px², pixel size of 6,7×6,7 um² and dynamics of 12 bits). The diameter of the par-ticle seeding (diluted polyglycol in water) were less than10 u m leading observed diameters around 1-2 pixels size.A Lens with focal length of 50 mm and aperture of 5.6 wasmounted on the camera. The field of view was 3,6D×2,9D. 100 100 80 60 40 20 100 x [px] 100 x [px] Fig.6 Deviation of different approaches from the exact velocity mod-ulus and corresponding vector field -From top to botom: correlation,optical-flow from Corpetti et al. (2006), collaborative 1, collaborative2. PSNR=12 dB. The correlation-based velocity fields were calculated withthe commercial software DaVis 6.2 from LaVision. A mul-tipass algorithm with a final interrogation window size of16×16 px²and 50% overlapping was applied. Image defor-mation and round gaussian weigthing function were used.Spurious velocities were identified with median filter and re-placed by the median. Figure 7 shows the estimated velocity fields using opticalflow technique (Corpetti et al., 2006) and the proposed col-laborative 2 approach. Optical flow method under-estimatedthe external high velocity which was approximately two timessmaller than the ground truth. This large error was reducedsignificantly by using the porposed collaborative approach.In figure 8, the vorticity color map of correlation-based andcollaborative approaches are shown. Less noisy vorticity mapwere provided by the collaborative scheme, associated witha finer description of the flow. This evaluation with exper-imental data indicated that the proposed collaborative ap-proach yielded reliable results where classical optical flowtechniques failed, with enlargement towards small scales ofthe spatial description compared to correlation-based tech-nique. x [px] Fig.7 Instantaneous vector field with horizontal velocity color map,in near the wake of a circular cylinder at Re=3900. Top, optical-flow approach(Corpetti et al., 2006);Bottom, proposed collaborativeapproach. 1 1000 Fig. 8 Instantaneous vector field with vorticity color map, in near thewake of a circular cylinder at Re =3900. Top, correlation approach;Bottom, proposed collaborative approach. 6 Conclusion In this paper, we have proposed and evaluated a new methodfor robust and dense estimations of instantaneous veloci-ties of fluid flows from image sequences. This method is acollaborative approach mixing fluid dedicated optical-flowmethod with correlation technique. The novel scheme hasbeen specifically designed to provide robust over noise anddense estimations. The developed approach has been tested on syntheticparticle images based on 2D turbulence and on real imagesequence recorded in the wake of a circular cylinder. In eachcases, we compared our results with the ones issued fromPIV and optic-flow. It was pointed out that the collaborativescheme reenforced fluid dedicated optical-flow methods to-wards robustness, while enlarging the range of scale that canbe resolved with correlation-based techniques. BERGEN, J., ANADAN, P., ANNA, K. & HINGORANI,R. 1992 Hierarchical model-based motion estimation. In ( Proc. Europ. conf. Computer V i sion (ed. G. Sandini), pp.237-252.Springer-Verlag. ) ( BERTERO, M . , P O GGIO, T. & TORRE, V. 1 98 8 Ill - posed problems in early vision. Proceedings of the EEE 76 (8),869-889. ) ( BIGUN,J . & GRANLUND, G. 198 8 Optical flow based onthe inertia matrix i n the frequency domain. In Proc. SSAB Symposium on Picture Processing. Lund, Sweeden. ) ( BLACK,M.& ANA N DAN, P. 1996 The robust estimation of multiple motions: Parametric and piecewise-smooth f low fields. Computer Vision and Image Understanding 63 (1),75-104. ) ( BRUHN, A., W EICKERT, J. & SCHNORR, C. 2005 Lu- cas/Kanade meets H orn/Schunck: c ombining local a ndglobal optic flow methods. I nternational Journal of Com-puter Vision 63 (3),211-231. ) ( CARLIER, J. & WIENEKE, B. 2005 Report 1 on pro- duction and d iffusion o f fluid m echanics i m ages anddata, Fluid project d eliverable 1 .2. European P r oject'Fluid image analisys and description ’( FLUID) -http://www.fluid.irisa.fr/. ) ( CORPETTI, T., HEITZ, D., ARROYO, G., MEMIN, E. & SANTA-CRUZ, A. 2006 Fluid experimental flow estima- tion based on an Optical-flow scheme. Exp. in Fluids 40,80-97. ) ( CORPETTI,T., MEMIN, E. & PEREZ, P. 2002 Dense esti- mation of fluid flows. IEEE Trans on Pattern Analysis andMachine Intelligence 24 (3), 3 65-380. ) ( HAIN, R. & KAHLER, C. 2007 Fundamentals of multiframe particle image velocimetry (PIV). E xp F l uids 4 2 , 5 7 5-587. ) ( HEITZ, D., NAVAZA, V . & CARLIER, J . 2006 Inter- mediate r eport on t he e valuation o f the tasks of theworkpackage 2, F l uid project d e liverable 5.1. EuropeanProject 'Fluid image analisys and description'(FLUID)- http://www.fluid.irisa.fr/. ) ( HORN, B . & SCHUNCK, B. 198 1 Det e rmining optical flow.Artificial Intelligence 17, 185-203. ) ( LECORDIER, B.& WESTERWEEL, J. 2003 The EUROPIV Synthetic Image G enerator (SIG). I n Particle image ve-locimetry: recent improvements (ed. M. Stanislas, J. West-erweel & J. Kompenhans), pp. 145-162.EUROPIV 2 workshop, Springer. ) ( LUCAS, B. & K A NADE, T. 1981 An ite r ative image reg- istration technique w ith a p plication to st e reo vi s ion. InProc. Seventh International Joint Conference on Artificial Intelligence, pp . 674-679. Vancouver, Canada. ) ( MEMIN, E. & PEREZ., P. 2 002 Hierarchical estimation and segmentation o f dense motion fields. Int. J. Computer Vi-sion 46 (2), 129-155. ) ( RUHNAU, P ., KOHLBERGER, T., SCHNORR, C. & NOBACH, H. 2005 Variational optical flow estimation for particle image velocimetry. Exp. i n Fluids 38, 21-32. ) ( STANSBY, P. K. 1974 The effects of end pla t es on the basepressure c oefficient of a circular cylinder. A eronautical Journal 78, 36-37. ) ( Proc. Conf. Comp. Vision Pattern Rec.,pp. 939-942. Seat- tle,USA. ) ( YUAN, J.,SCHNORR,C. & STEIDL, G. 2007 Simultaneous higher-order o ptical flow e stimation and d e composition. SIAM J. S ci. Computing, in press. )
确定




还剩7页未读,是否继续阅读?

产品配置单

北京欧兰科技发展有限公司为您提供《流场中速度场,速度矢量场检测方案(粒子图像测速)》,该方案主要用于其他中速度场,速度矢量场检测,参考标准--,《流场中速度场,速度矢量场检测方案(粒子图像测速)》用到的仪器有德国LaVision PIV/PLIF粒子成像测速场仪
推荐专场




相关方案
更多
该厂商其他方案
更多