








方案详情
文
准确获取空气质量的时空变化特征,可以降低在健康影响和问责研究中的风险预测误差,并在分配研究中更好地确定责任来源。由于城市和工业地区污染物排放源多样化且高度不一,又有不断变化的气象条件,使得空气质量表现出相当大的时空变化。
传统的监测站,通常以监管目的而建立,只能测量特定的少数污染物,关于空间变化只能提供极少部分的信息。遥感数据,最常用是利用卫星数据来估计污染物浓度,可用于几种污染物,但以相对粗略的空间分辨率提供柱积分测量。扩散模型可以提供空间和时间信息,但源清单中的空缺和其他限制增加了该方法的不确定性,并可能导致较大误差。
方案详情

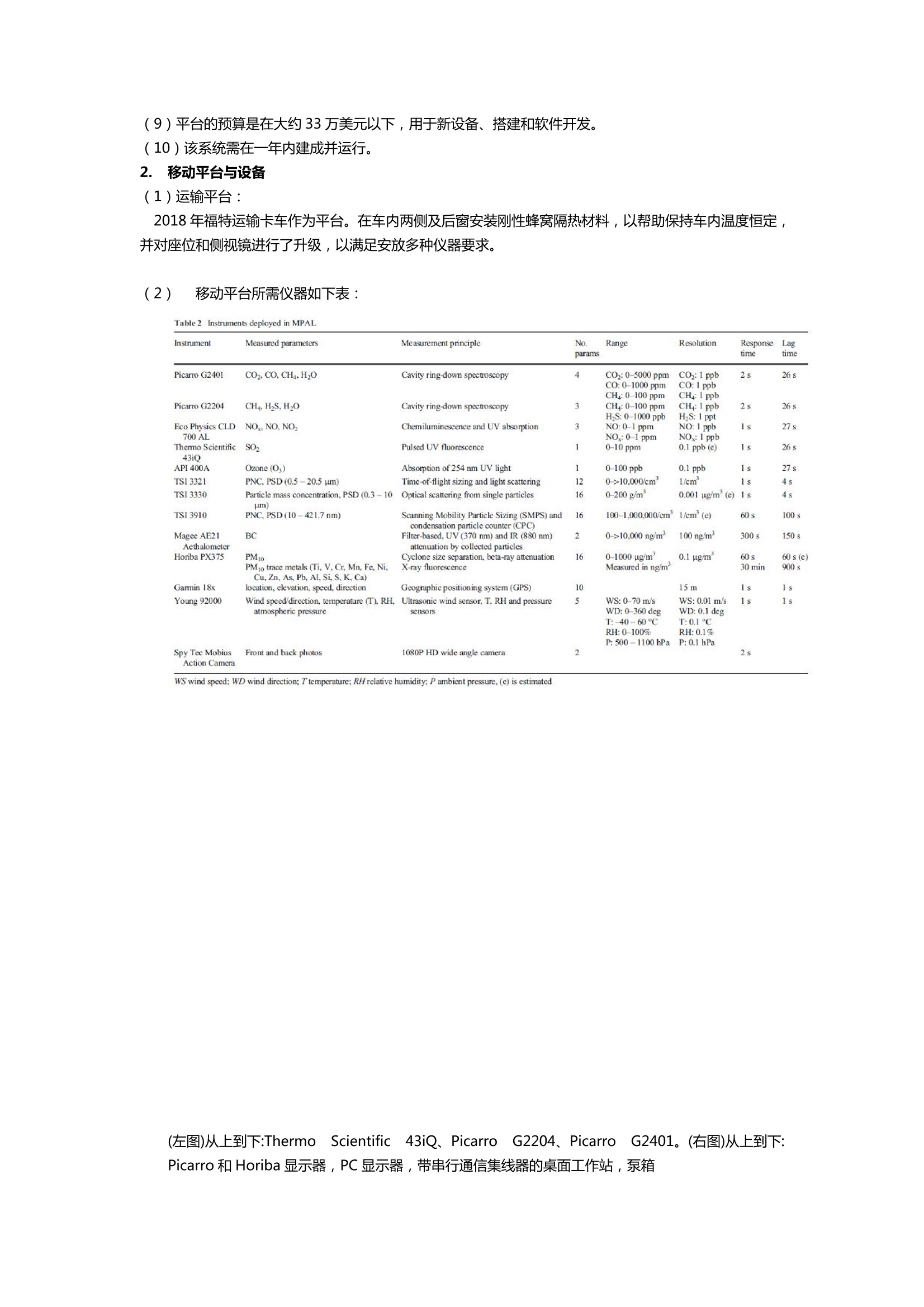
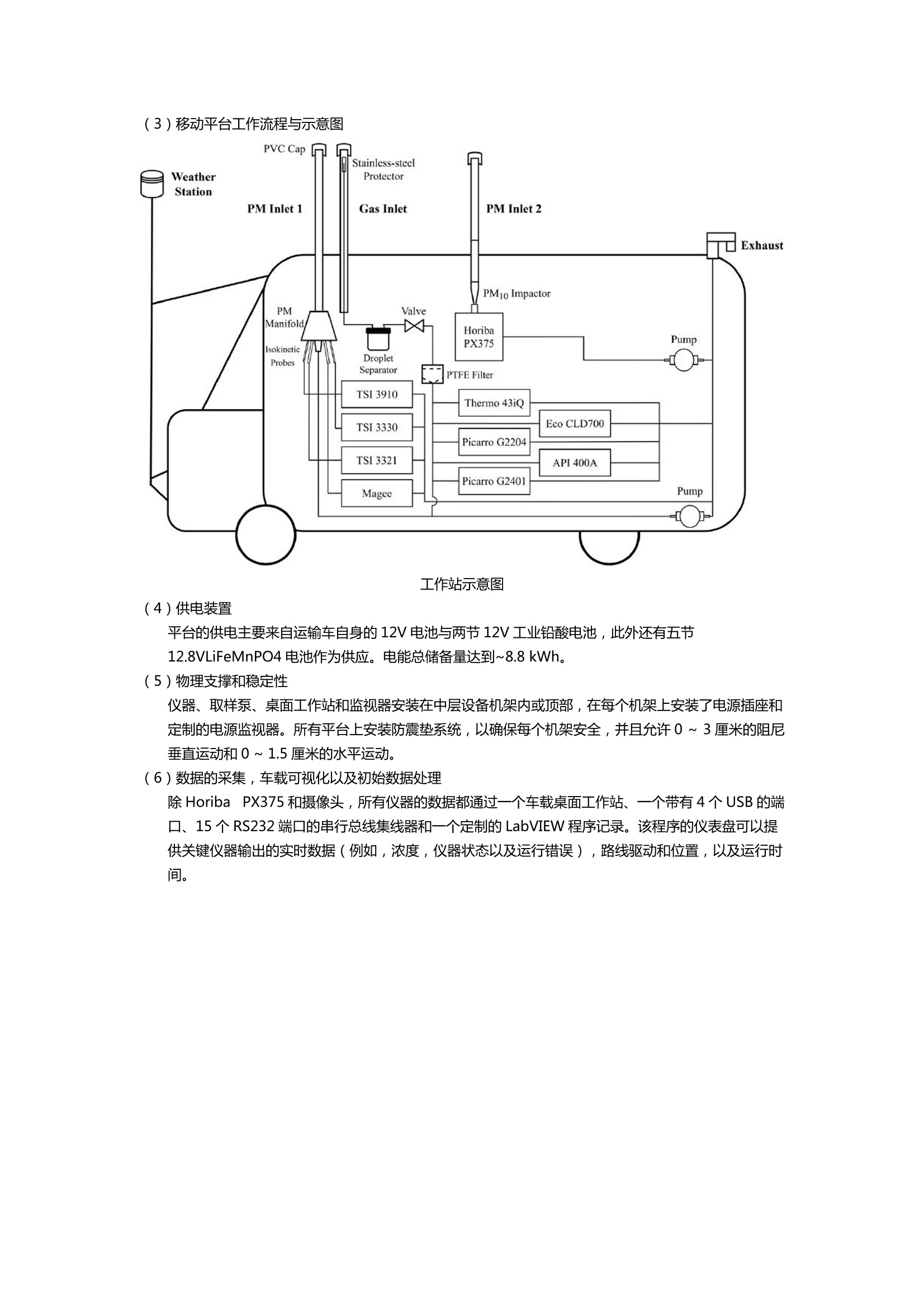
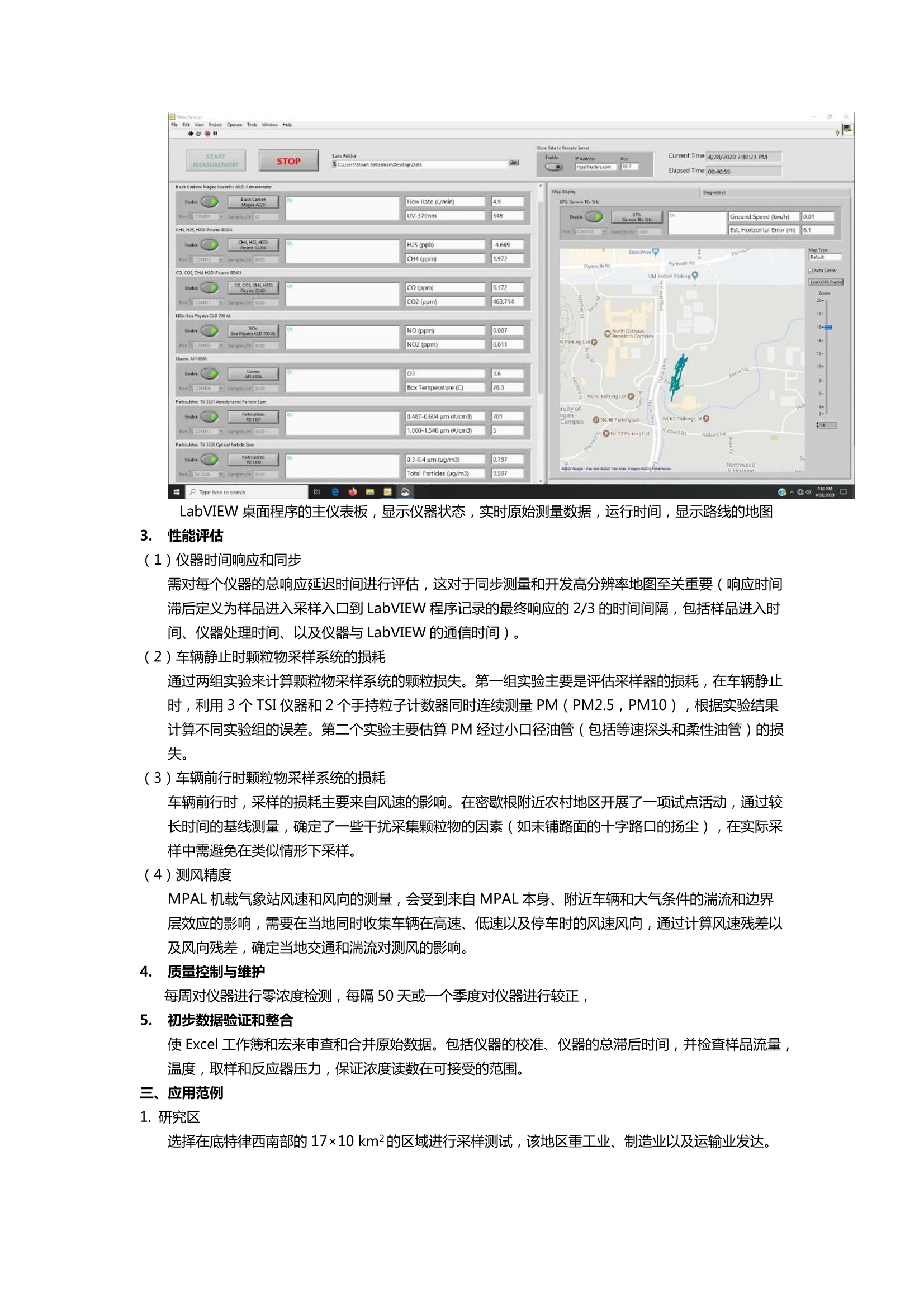
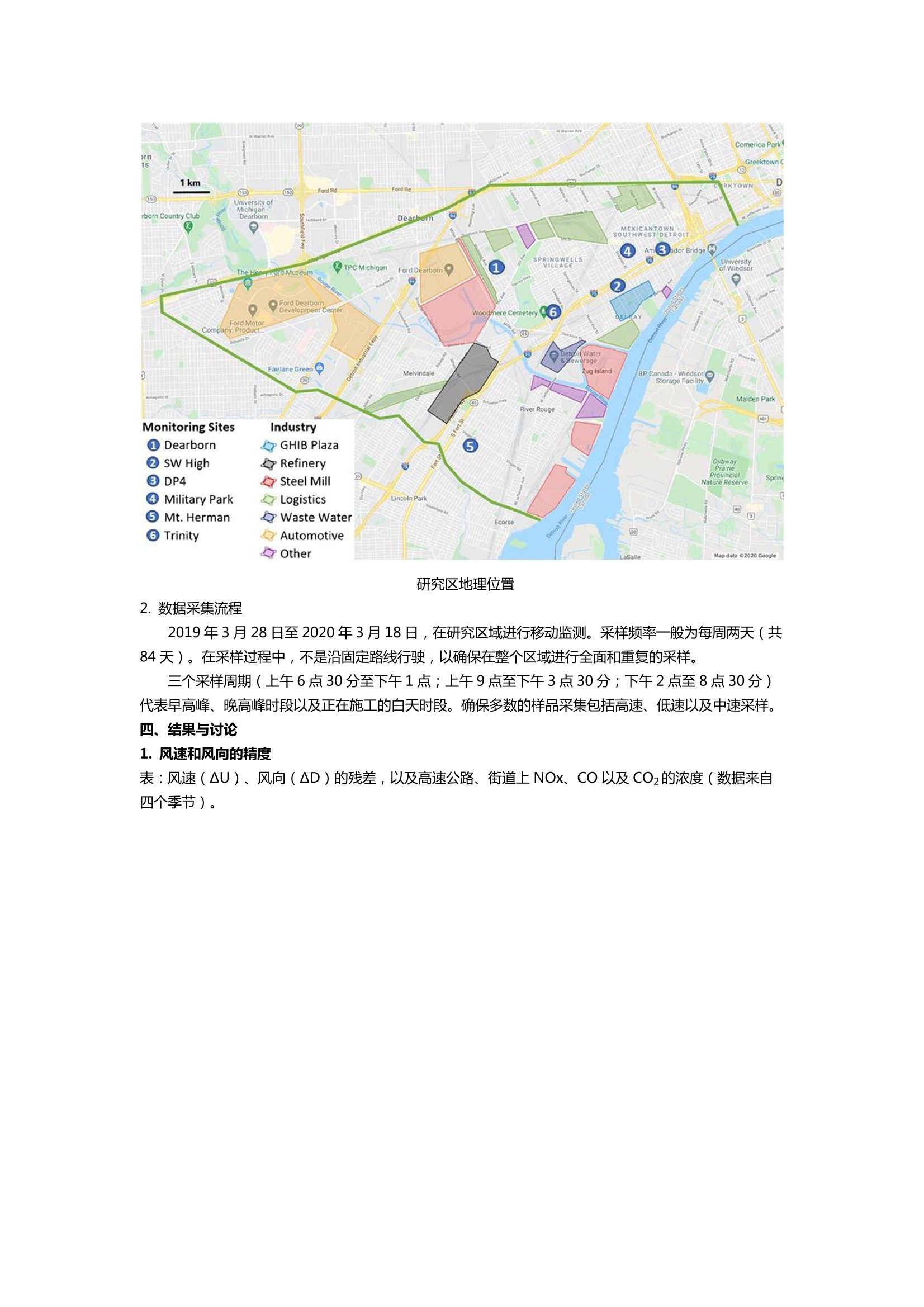
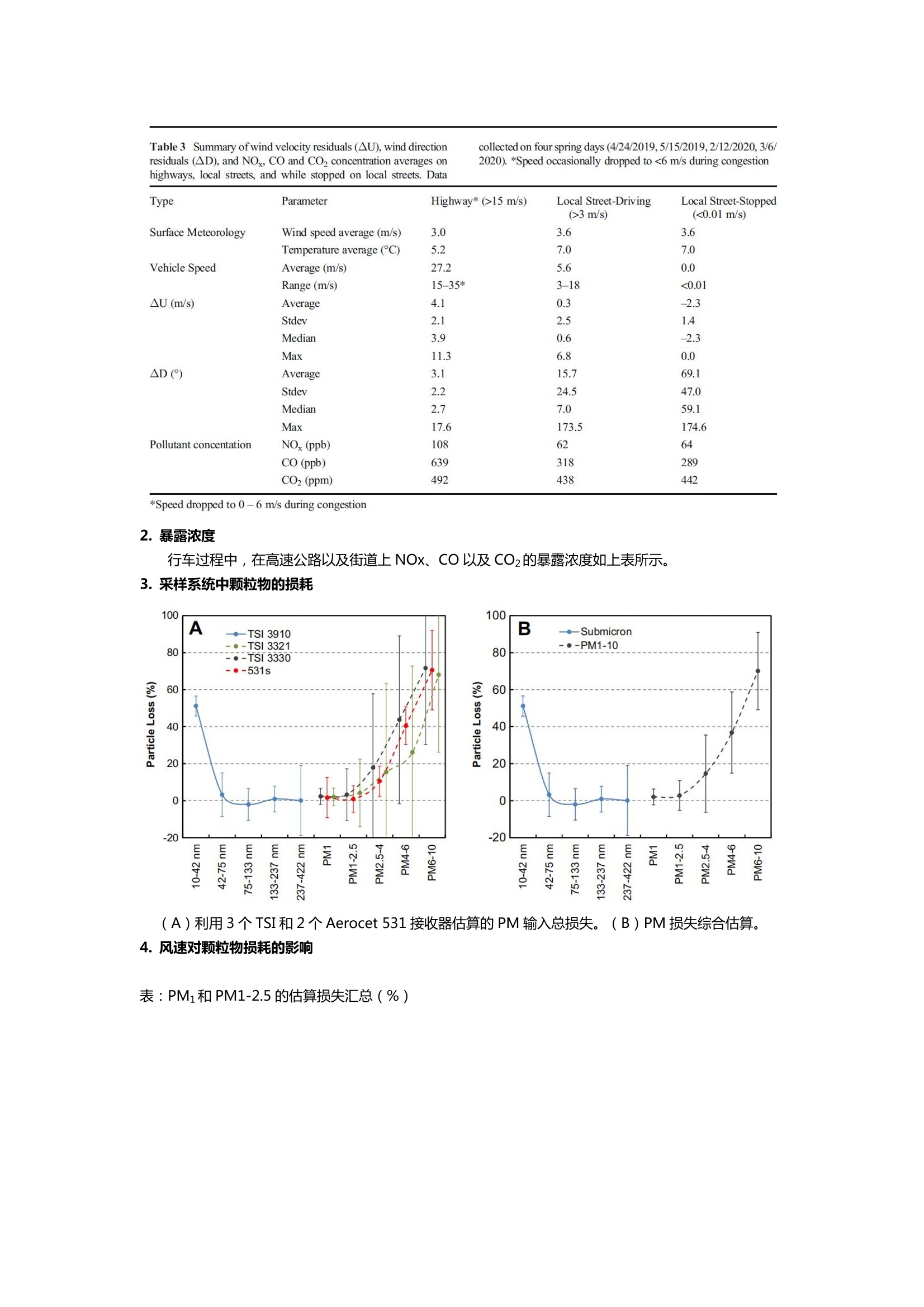
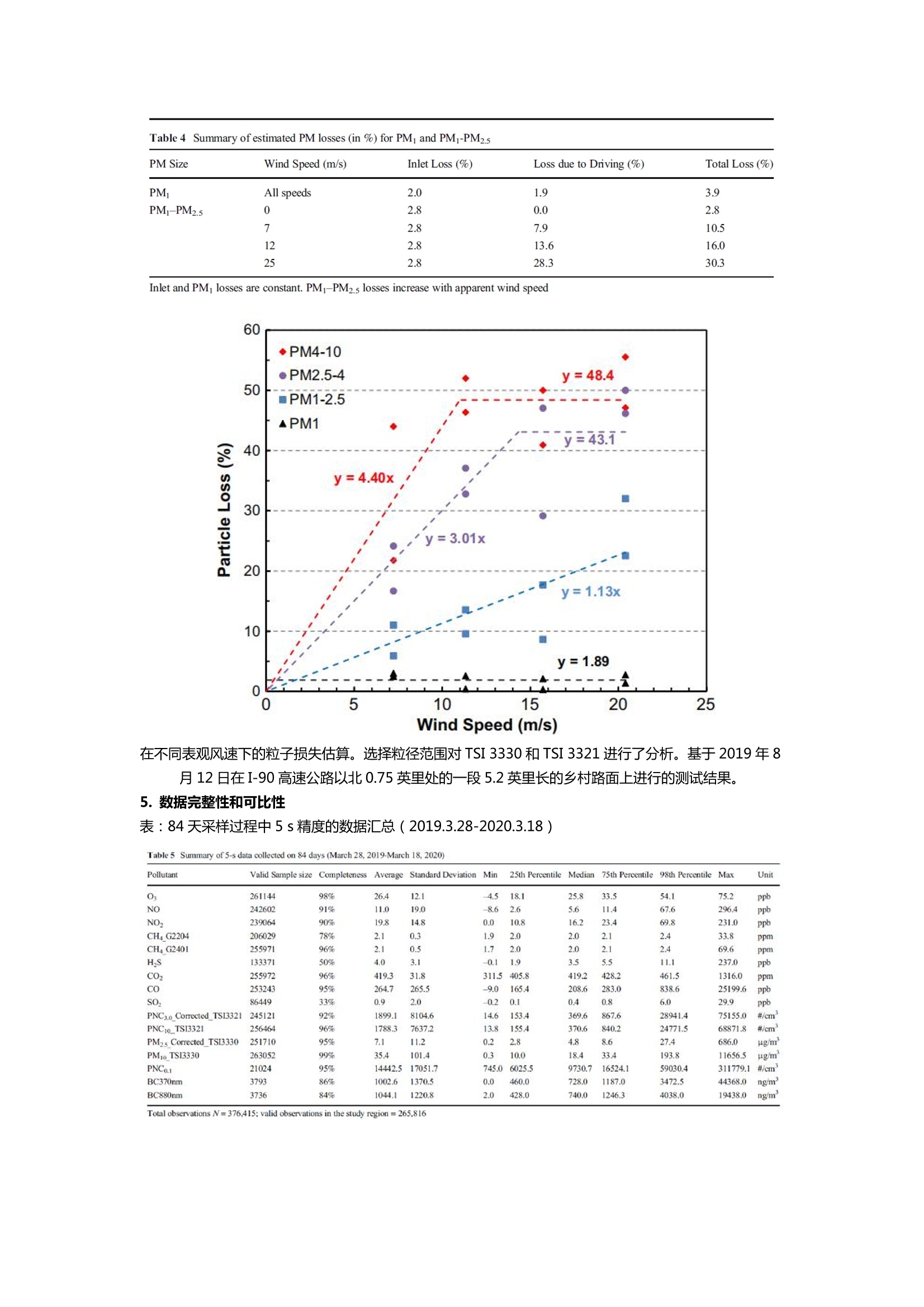
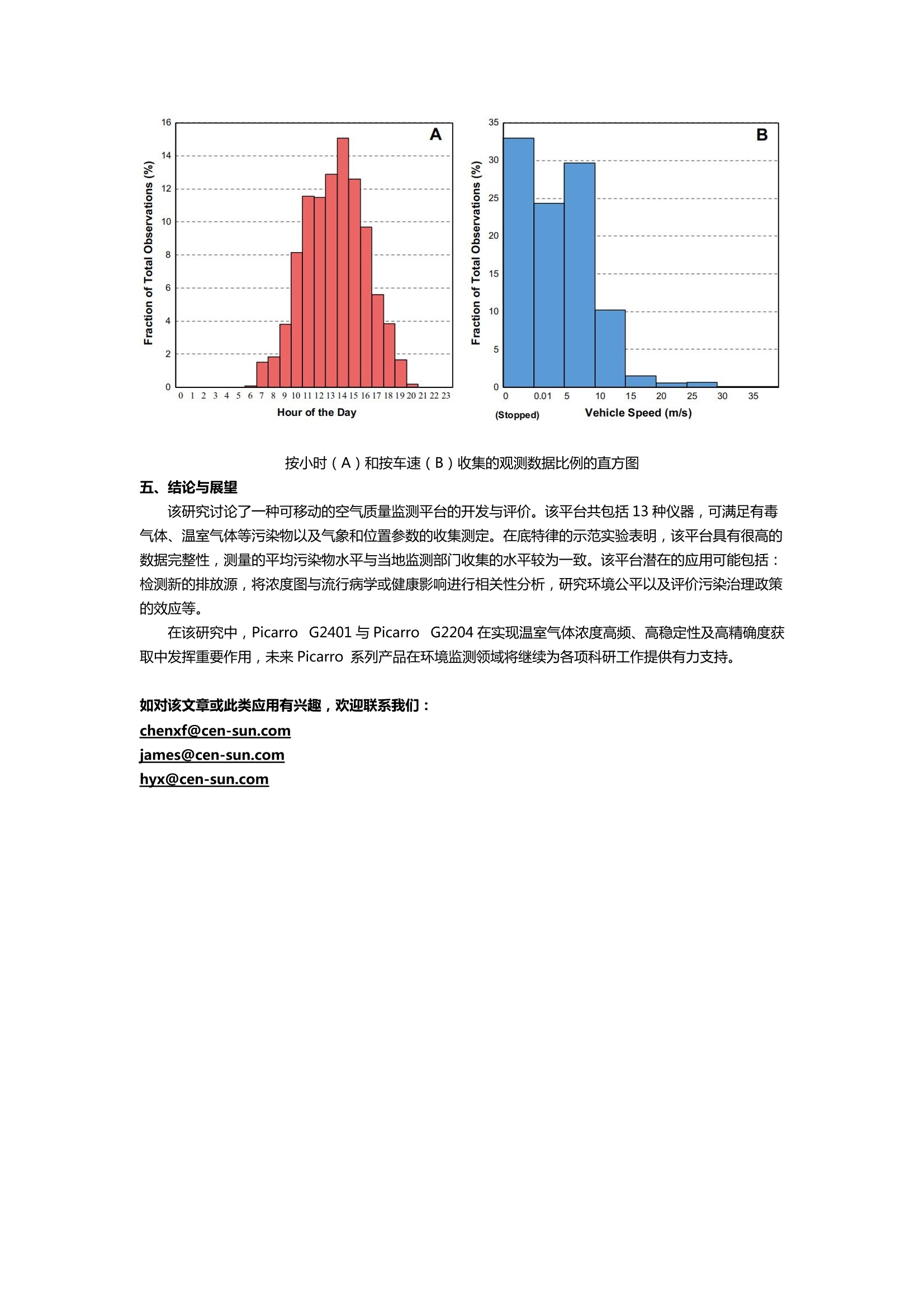
collected on four spring days (4/24/2019,5/15/2019,2/12/2020, 3/6/2020). *Speed occasionally dropped to <6 m/s during congestion Picarro 系列产品在环境监测领域大有可为:密歇根大学科研团队开发的多功能大气环境监测移动平台应用案例分析 Environ Monit Assess (2021)193:7 https://doi.org/10.1007/s10661-020-08769-2 Development of a mobile platform for monitoring gaseous,particulate, and greenhouse gas (GHG) pollutants Tian Xia D· James Catalan· Chris Hu· Stuart Batterman 一、前言: 准确获取空气质量的时空变化特征,可以降低在健康影响和问责研究中的风险预测误差,并在分配研究中更好地确定责任来源。由于城市和工业地区污染物排放源多样化且高度不一,又有不断变化的气象条件,使得空气质量表现出相当大的时空变化。 传统的监测站,通常以监管目的而建立,只能测量特定的少数污染物,关于空间变化只能提供极少部分的信息。遥感数据,最常用是利用卫星数据来估计污染物浓度,可用于几种污染物,但以相对粗略的空间分辨率提供柱积分测量。扩散模型可以提供空间和时间信息,但源清单中的空缺和其他限制增加了该方法的不确定性,并可能导致较大误差。 使用移动平台来测量空气污染物的空间变化和检测空气污污物的峰值或“热点"”,已经成为对固定监测和遥感的补充监测方法。在过去的二十年里,移动监控已经被用于各种目的,如空气污染物在特定环境的浓度空间分布、估算人为活动所引起的污染物排放放以及及制分布图等,但大多数使用移动平台的野外活动持续时间很短(通常只有几天),而且大多数都集中在一种污染物上。 基于以上研究进展与尚未解决的问题 ,Xia Tian 团队开发了名为“密歇根污染评估实验室"(MPAL)的空气质量移动监测平台,本文强调了几个重要的问题,例如 PM 测量中的潜在偏差和车速的影响,并提供了可评估和解决这些问题的实用技术。 二、材料与方法: 1.该平台需满足的条件如下: (1)可测定多种参数,包括标准、有毒以及温室气体污染物,以及气象和位置参数; (2)倾向于选择可靠、耐用、自动化和可购买的仪器,并符合美国环境保护局联邦参考方法(FRM)或联邦等效方法(FEMs),以及其他具有技术支持和已知性能的仪器。 (3)可获得高时间分辨率的参数(理想情况下为1s),并允许在正常速度行驶过程中支持测绘和其他应用(但是由于很多参数不能以上述种、频率测量,因此本条件根根实际情况进行变化)。 (4)仪器的特性除本身测定目的外,还应包括辅助性要求(必须满足如物理尺寸、功率、入口流量、需要的外部泵和压缩气体的限制要求)。考虑到安全、空间和后勤问题,不得携带气瓶。 (5)仪器摆放环境应减少或控制振动、冲击、温度波动和冷凝;尽量减少车内噪音。 (6)为了方便数据管理和实时评估,需要高度的系统集成。例如,允许车辆处于顺风位置,并向专业人员实时显示数据趋势和其他结果。 (7)监测平台本身需要有足够的空间来安装仪器和站立的空间,同时也要保持车辆尺寸相对紧凑,以便于操作、停车或在崎岖狭窄的街道上行驶,并考虑高度限制与燃料效率。 (8)监控系统需实现基本的自动化,尽量满足平台由驾驶员操作,节省技术人员数量。 (9)平台的预算是在大约33万美元以下,用于新设备、搭建和软件开发。 (10)该系统需在一年内建成并运行。 2.移动平台与设备 (1)运输平台: 2018年福特运输卡车作为平台。在车内两侧及后窗安装刚性蜂窝隔热材料,以帮助保持车内温度恒定 ,并对座位和侧视镜进行了升级,以满足安放多种仪器要求。 (2) 移动平台所需仪器如下表 : Table2 Instruments deployed in MPAL Instrument Measured parameters Measurement principle No. Range Resolution Response Lag params time time Picarro G2401 CO2. CO. CH,HO Cavity ring down spectroscopy 4 COy: 0-5000 ppm CO: 1 ppb 2s :26s CO:0-1000 ppm CH:0-100 ppm CO: 1 ppb CH:1 ppb Picarro G2204 CH,H2S,H2O Cavity ring down spectroscopy 3 CH:0-100 ppm CH:1 ppb 2s 26s HS:0-1000ppb HS: I ppt Eco Physics CLD NO,NO,NO, Chemiluminescence and UV absorption NO: 0-1 ppm NO:1 ppb ls 27 s 700 AL NO:0-1 ppm NO:1 ppb Thermo Scientific SO, 43iQ) API 400A Pulsed UV fluorescence 0-10 ppm 0.1 ppb (e) 1s 26 s Ozone (O) Absorption of 254 nm UV light 0-100 ppb 0.1 ppb 27s TS1 3321 PNC. PSD (0.5-20.5um) Time-of-flight sizing and light scattering 12 0->10.000/cm’ 1/cm 44 TSI 3330 Particle mass concentration, PSD (0.3-10 )Optical scattering from single particles 16 0-200 g/m’ 0.001 ug/m(e) 1s TSI 3910 um) PNC,PSD (10-421.7 nm) Scanning Mobility Particle Sizing (SMPS) and condensation particle counter (CPC) Filter-bascd,UV (370 nm) and IR (880nm) 16 100-1.000.000/cm’1/cm(e) 60 s 100: Magee AE21 BC 2 0->10,000 ng/m’ 100 ng/m’ 300: 150: Aethalometer Horiba PX375 PM1o atlenuation by collected particles Cyclone size separation, beta-ray attenuation 16 0-1000 ug/m 0.I pg/m 60s 60 s (c) PMo trace metals (Ti, V. Cr, Mn, Fe, Ni, Cu, Zn. As, Pb, Al, Si,S, K. Ca) location, elevation, speed, direction X-ray fluorescence Measured in ng/m 30 min 900 s Garmin 18x Geographic posilioning system (GPS) 10 15m ls 11 Young 92000 Wind speed/direction, temperature (T),RH, Ultrasonic wind sensor. T. RH and pressure 5 WS: 0-70 m/s WS: 0.01 m/s 1s atmospheric pressure sensors WD: 0-360 deg WD: 0.1 dcg T:-40-60℃ T:0.1°C RH: 0-100% P: 500-1100 hPa RH:0.1% a P:0.1 hPa 1080P HD wide angle camera 2s Spy Tec Mobius Front and back photos Action Camera WS wind speed: WD wind direction: Ttemperature: RH relative humidity: P ambient pressure.(e) is estimated (左图)从上到下:ThermoScientific 43iQ、Picarro (G2204、Picarro G2401。(右图)从上到下: Picarro 和 Horiba 显示器, PC显示器,带串行通信集线器的桌面工作站,泵箱 (3)移动平台工作流程与示意图 PVC Cap 工作站示意图 (4)供电装置 平台的供电主要来自运输车自身的12V电池与两节12V工业铅酸电池,此外还有五节 12.8VLiFeMnPO4电池作为供应。电能总储备量达到~8.8 kWh。 (5)物理支撑和稳定性 仪器、取样泵、桌面工作站和监视器安装在中层设备机架内或顶部,在每个机架上安装了电源插座和定制的电源监视器。所有平台上安装防震垫系统,以确保每个机架安全,并且允许0~3厘米的阻尼垂直运动和0~1.5厘米的水平运动。 (6)数据的采集,车载可视化以及初始数据处理 除 Horiba PX375和摄像头,所有仪器的数据都通过一个车载桌面工作站、一个带有4个USB的端口、15个RS232端口的串行总线集线器和一个定制的 LabVIEW 程序记录。该程序的仪表盘可以提供关键仪器输出的实时数据(例如,浓度,仪器状态以及运行错误),路线驱动和位置,以及运行时间。 国MIM LabVIEW 桌面程序的主仪表板,显示仪器状态,实时原始测量数据,运行时间,显示路线的地图 3. 性能评估 (1)仪器时间响应和同步 需对每个仪器的总响应延迟时间进行评估,这对于同步测量和开发高分辨率地图至关重要(响应时间滞后定义为样品进入采样入口到 LabVIEW 程序记录的最终响应的2/3的时间间隔,包括样品进入时间、仪器处理时间、以及仪器与 LabVIEW的通信时间)。 (2)车辆静止时颗粒物采样系统的损耗 通过两组实验来计算颗粒物采样系统的颗粒损失。第一组实验主要是评估采样器的损耗,在车辆静止时,利用3个TSI仪器和2个手持粒子计数器同时连续测量 PM (PM2.5, PM10),根据实验结果计算不同实验组的误差。第二个实验主要估算 PM经过小口径油管(包括等速探头和柔性油管)的损失。 (3)车辆前行时颗粒物采样系统的损耗 车辆前行时,采样的损耗主要来自风速的影响。在密歇根附近农村地区开展了一项试点活动,通过较长时间的基线测量,确定了一些干扰采集颗粒物的因素(如未铺路面的十字路口的扬尘),在实际采样中需避免在类似情形下采样。 (4)测风精度 MPAL 机载气象站风速和风向的测量,会受到来自 MPAL本身、附近车辆和大气条件的湍流和边界层效应的影响,需要在当地同时收集车辆在高速、低速以及停车时的风速风向,通过计算风速残差以及风向残差,确定当地交通和湍流对测风的影响。 4. 质量控制与维护 每周对仪器进行零浓度检测,每隔50天或一个季度对仪器进行较正, 5. 初步数据验证和整合 使 Excel 工作簿和宏来审查和合并原始数据。包括仪器的校准、仪器的总滞后时间,并检查样品流量,温度,取样和反应器压力,保证浓度读数在可接受的范围。 三、应用范例 1.研究区 选择在底特律西南部的17×10 km²的区域进行采样测试,该地区重工业、制造业以及运输业发达。 研究区地理位置 2.数据采集流程 2019年3月28日至2020年3月18日,在研究区域进行移动监测。采样频率一般为每周两天(共84天)。在采样过程中,不是沿固定路线行驶,以确保在整个区域进行全面和重复的采样。 三个采样周期(上午6点30分至下午1点;上午9点至下午3点30分;下午2点至8点30分)代表早高峰、晚高峰时段以及正在施工的白天时段。确保多数的样品采集包括高速、低速以及中速采样。 四、结果与讨论 1.风速和风向的精度 表:风速(AU)、风向(△D)的残差,以及高速公路、街道上 NOx、 CO以及 CO2的浓度(数据来自四个季节)。 Table3 Summary of wind velocity residuals (AU), wind directionresiduals (AD), and NO,CO and CO2 concentration averages onhighways, local streets, and while stopped on local streets. Data Type Parameter Highway* (>15 m/s) Local Street-Driving Local Street-Stopped (>3 m/s) (<0.01 m/s) Surface Meteorology Wind speed average (m/s) Temperature average (C) Vehicle Speed Average (m/s) 27.2 Range (m/s) 15-35* 3-18 <0.01 AU (m/s) Average 0.3 -2.3 Stdev 2.5 1.4 Median 0.6 -2.3 AD() Max 11.3 6.8 0.0 Average 15.7 69.1 Stdev 24.5 47.0 Median 7.0 59.1 Max 17.6 173.5 174.6 Pollutant concentation NOx (ppb) 108 62 64 co (ppb) 639 318 289 CO2 (ppm) 492 438 442 *Speed dropped to 0-6 m/s during congestion 2. 暴露浓度 行车过程中,在高速公路以及街道上 NOx、CO以及 CO2的暴露浓度如上表所示。 3. 采样系统中颗粒物的损耗 (A)利用3个TSI和2个Aerocet 531 接收器估算的PM 输入总损失。(B)PM损失综合估算。 4.风速对颗粒物损耗的影响 表:PM1和PM1-2.5的估算损失汇总(%) Table 4 Summary of estimated PM losses (in %) for PM and PMj-PM2.5 PM Size Wind Speed (m/s) Inlet Loss (%) Loss due to Driving (%) Total Loss (%) PM All speeds 2.0 1.9 3.9 PM-PM2.5 0 2.8 0.0 2.8 7 2.8 7.9 10.5 12 2.8 13.6 16.0 25 2.8 28.3 30.3 Inlet and PM; losses are constant.PM-PM2.5 losses increase with apparent wind speed 在不同表观风速下的粒子损失估算。选择粒径范围对 TSI 3330和 TSI 3321 进行了分析。基于2019年8月12日在I-90高速公路以北0.75英里处的一段5.2英里长的乡村路面上进行的测试结果。 5.数据完整性和可比性 表:84天采样过程中5s精度的数据汇总(2019.3.28-2020.3.18) Table 5 Summary of 5-s data collected on 84 days (March 28,2019-March 18,2020) Pollutant Valid Sample size Completeness Average Standard Deviation Min 25th Percentile Median 75th Percentile 98th Percentile Max Unit 0: 261144 98% 26.4 12.1 -4.5 18.1 25.8 33.5 54.1 75.2 ppb NO 242602 91% 11.0 19.0 -8.6 2 5.6 11.4 67.6 296.4 ppb NO: 239064 90% 19.8 14.8 0.0 10.8 16.2 23.4 69.8 231.0 ppb CH;G2204 206029 78% 2.1 0.3 1.9 2.0 2.0 2.1 2.4 33.8 ppm CH; G2401 255971 96% 2.1 0.5 1.7 2.0 2.0 2.1 2.4 69.6 ppm H,S 133371 50% 4.0 3.1 -0.1 1.9 3.5 5.5 11.1 237.0 ppb CO2 255972 96% 419.3 31.8 311.5 405.8 419.2 428.2 461.5 1316.0 ppm co 253243 95%6 264.7 265.5 -9.0 165.4 208.6 283.0 838.6 25199.6 ppb SO: 86449 33% 0.9 2.0 0.2 0.1 0.4 0.8 6.0 29.9 ppb PNC3.0 Corrected TSI3321 245121 92% 1899.1 8104.6 14.6 153.4 369.6 867.6 28941.4 75155.0 #/cm PNC:o_TSI3321 256464 96% 1788.3 76372 13.8 155.4 370.6 840.2 24771.5 68871.8 #/cm PMs Corrected_TSI3330 251710 95% 7.1 11.2 0.2 2.8 4.8 8.6 27.4 686.0 ug/m PM1o TSI3330 263052 99% 35.4 101.4 0.3 10.0 18.4 33.4 193.8 11656.5 Hg/m PNCo: 21024 95% 14442.5 17051.7 745.0 6025.5 9730.7 16524.1 59030.4 311779.1 #/cm’ BC370nm 3793 86% 1002.6 1370.5 0.0 460.0 728.0 1187.0 3472.5 44368.0 ng/m' BC880nm 3736 84% 1044.1 1220.8 2.0 428.0 740.0 1246.3 4038.0 19438.0 ng/m Total observations N=376,415; valid observations in the study region=265.816 按小时(A)和按车速(B)收集的观测数据比例的直方图 五、结论与展望 该研究讨论了一种可移动的空气质量监测平台的开发与评价。该平台共包括13种仪器,可满足有毒气体、温室气体等污染物以及气象和位置参数的收集测定。在底特律的示范实验表明,该平台具有很高的数据完整性,测量的平均污染物水平与当地监测部门收集的水平较为一致。该平台潜在的应用可能包括:检测新的排放源,将浓度图与流行病学或健康影响进行相关性分析,研究环境公平以及评价污染治理政策的效应等。 在该研究中, Picarro G2401与 Picarro G2204 在实现本室气体浓度高频、高稳定性及高精确度获取中发挥重要作用,未来 Picarro 系列产品在环境监测领域将继续为各项科研工作提供有力支持。 如对该文章或此类应用有兴趣,欢迎联系我们: chenxf@cen-sun.com james@cen-sun.com hyx@cen-sun.com 使用移动平台来测量空气污染物的空间变化和检测空气污染物的峰值或“热点”,已经成为对固定监测和遥感的补充监测方法。在过去的二十年里,移动监控已经被用于各种目的,如空气污染物在特定环境的浓度空间分布、估算人为活动所引起的污染物排放量以及绘制分布图等,但大多数使用移动平台的野外活动持续时间很短(通常只有几天),而且大多数都集中在一种污染物上。基于以上研究进展与尚未解决的问题,Xia Tian团队开发了名为“密歇根污染评估实验室”(MPAL)的空气质量移动监测平台,本文强调了几个重要的问题,例如PM测量中的潜在偏差和车速的影响,并提供了可评估和解决这些问题的实用技术。
确定
还剩6页未读,是否继续阅读?

产品配置单

北京世纪朝阳科技发展有限公司为您提供《空气中污染物检测方案(多气体分析仪)》,该方案主要用于空气中有机污染物检测,参考标准--,《空气中污染物检测方案(多气体分析仪)》用到的仪器有Picarro G2204 超痕量甲烷/硫化氢(CH4/H2S)气体分析仪
推荐专场




相关方案
更多
该厂商其他方案
更多