







方案详情
文
We study three monodomain single-crystal nematic elastomer materials, all side-chain siloxane polymers with the same mesogenic groups but with different types of cross linking: short flexible siloxane linkage affine to the network backbone, short flexible aliphatic cross links miscible with mesogenic side-chain groups, and long segments of main-chain nematic polymer. The dynamic mechanical response of these three systems shows a characteristically universal decrease of storage modulus and a corresponding increase of loss factor. This effect of dynamic soft elasticity is strongly anisotropic, depending on the nematic director orientation. We examine the important role of the average backbone chain anisotropy , which is affected by the cross-linking geometry and contributes to the magnitude and frequency dependence of the
dynamic anomaly, and discuss possible applications in mechanical damping and polarized acoustic technology.
方案详情

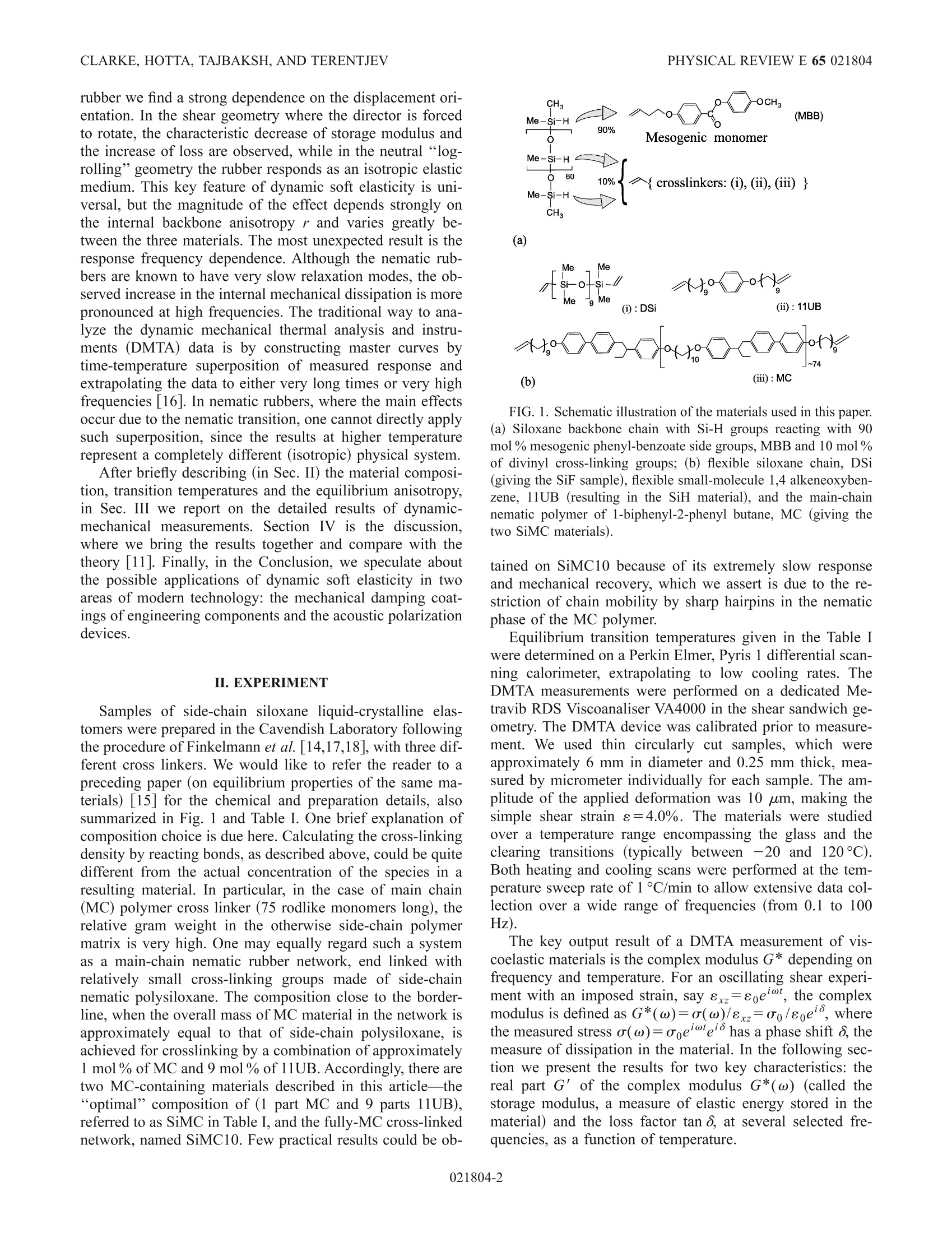
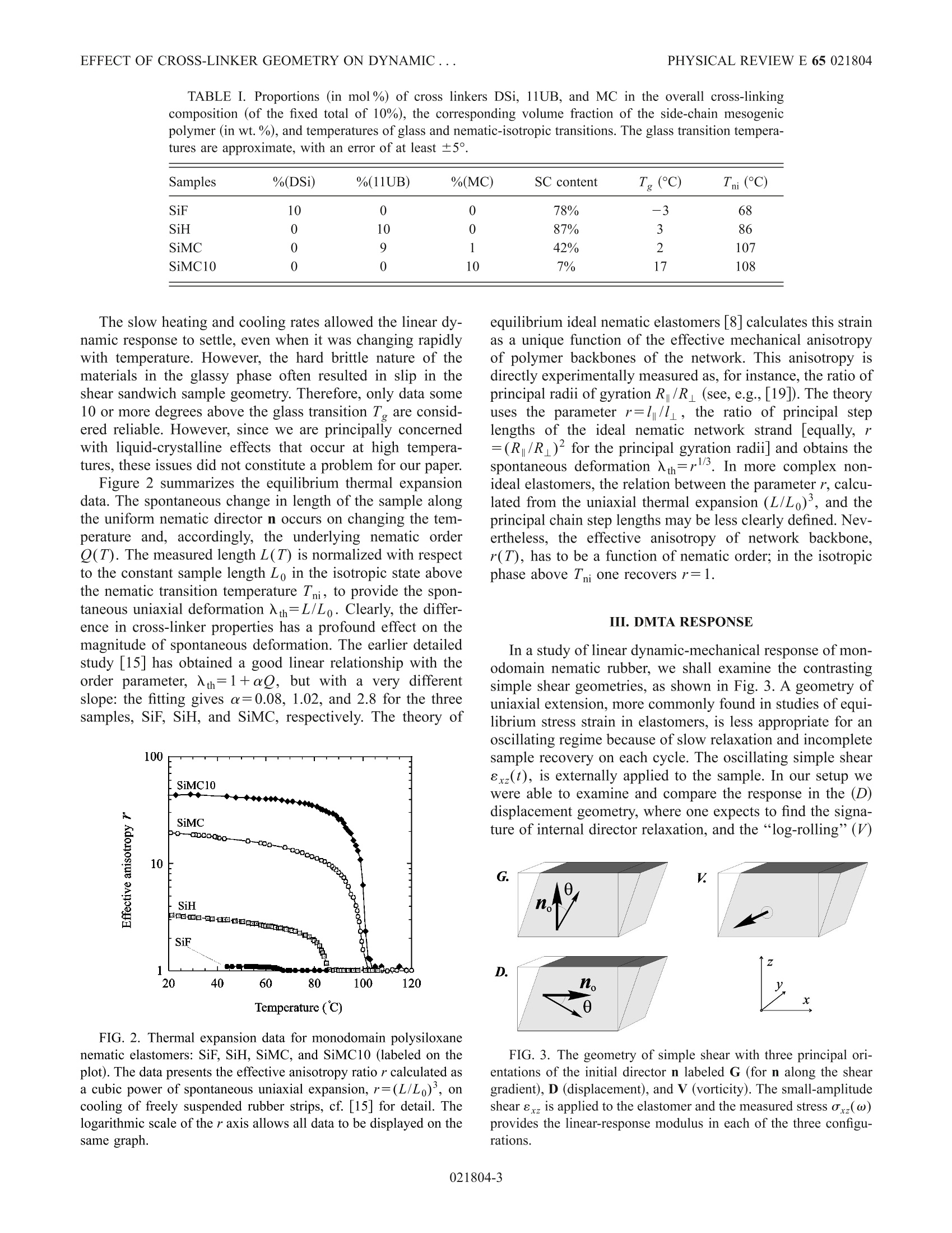
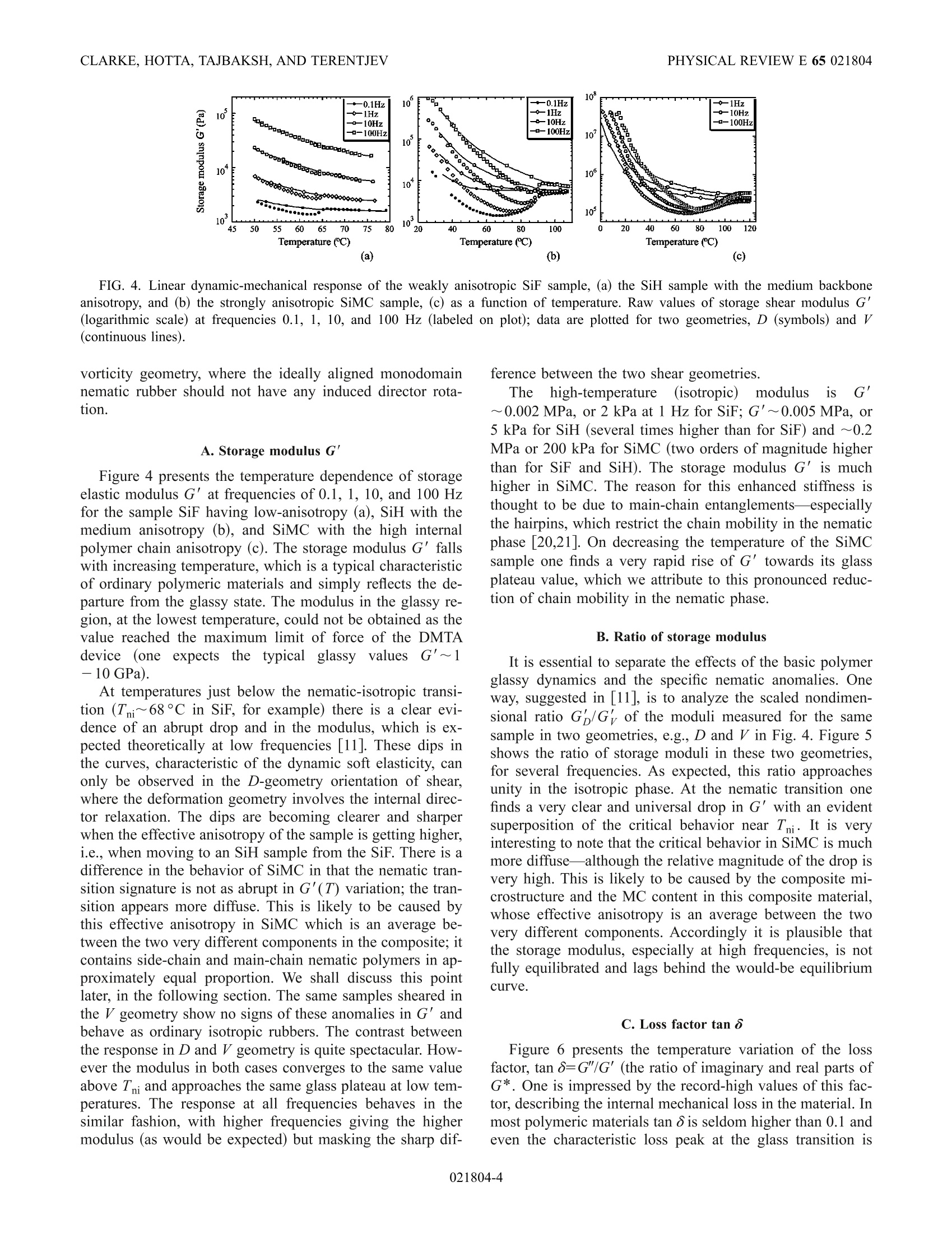
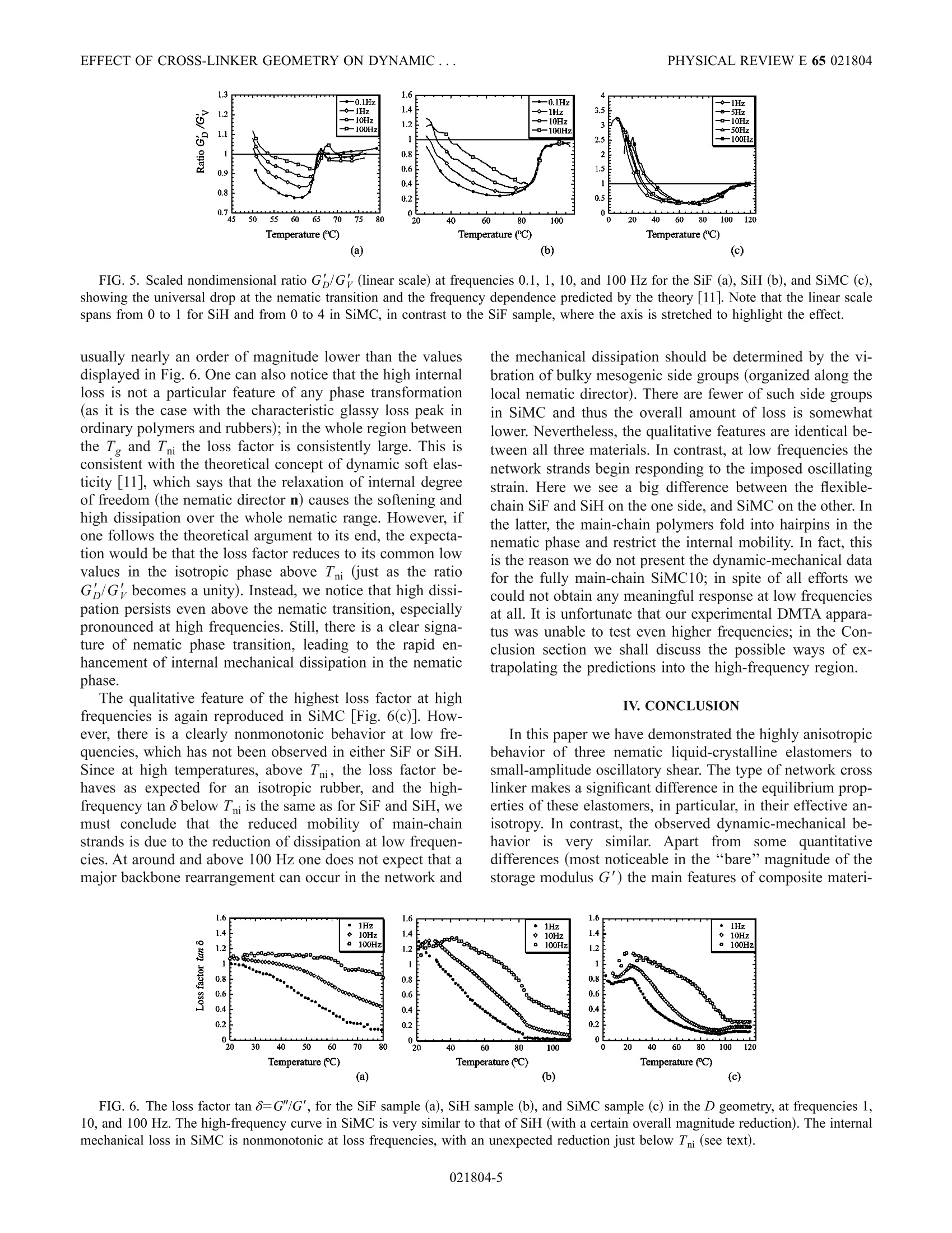
PHYSICAL REVIEW E, VOLUME 65,021804 CLARKE, HOTTA, TAJBAKSH, AND TERENTJEVPHYSICAL REVIEW E 65 021804 Effect of cross-linker geometry on dynamic mechanical properties of nematic elastomers S. M. Clarke,* A. Hotta, A. R. Tajbakhsh, and E. M. Terentjev Cavendish Laboratory, University ofCambridge, Madingley Road, Cambridge CB3 0HE, United Kingdom(Received 30 August 2001; published 18 January 2002) We study three monodomain (single-crystal) nematic elastomer materials, all side-chain siloxane polymerswith the same mesogenic groups but with different types of cross linking: (i) short flexible siloxane linkageaffine to the network backbone, (ii) short flexible aliphatic cross links miscible with mesogenic side-chaingroups, and (iii) long segments of main-chain nematic polymer. The dynamic mechanical response of thesethree systems shows a characteristically universal decrease of storage modulus and a corresponding increase ofloss factor. This effect of “dynamic soft elasticity”is strongly anisotropic, depending on the nematic directororientation. We examine the important role of the average backbone chain anisotropy r(T)=l /l, which isaffected by the cross-linking geometry and contributes to the magnitude and frequency dependence of thedynamic anomaly, and discuss possible applications in mechanical damping and polarized acoustic technology. DOI: 10.1103/PhysRevE.65.021804 PACS number(s): 61.30.-v, 61.41.+e, 46.40.Ff I. INTRODUCTION Liquid-crystalline elastomers presently attract much atten-tion due to the behavior arising from a coupling between thespontaneous orientational ordering and the elastic propertiesof polymer network. Many unusual physical effects havebeen identified and reviewed in [1-4]. One of the key equi-librium effects is a macroscopic phenomenon of“soft elas-ticity”[5] (see also [6,7]). In conventional elastomers andgels the entropic cost of deforming the average (spherical)backbone polymer coil provides the restoring force and theresulting rubber elasticity. When the network strands arespontaneously anisotropic (ellipsoidal), then instead of de-forming the average polymer conformation, some strainscould be completely accommodated by simply rotating theaverage chain distribution without changing its shape. Ac-cordingly, no elastic energy cost would be paid for such de-formations. In many cases the ideal soft response cannot beachieved, but one still finds a signature of soft elasticity inthe decrease of one of the shear moduli for the same defor-mation modes that would lead to a complete softness in anideal nematic network [8]. In contrast to their equilibrium properties, the dynamicsof liquid-crystalline elastomers is studied much less. How-ever, important questions arise and so do the expectations ofrelated physical effects. How does the dynamics of internaldirector rotation, and the corresponding time-dependent soft-ening of the rubber-elastic response, determine the dynamicmechanical response of a nematic rubber? In a study of thiskind, Gallani et al. [9] studied the stress response to an im-posed oscillating shear. Although a polydomain elastomerhas been examined, the authors reached a conclusion that theresponse“...is insensitive to the isotropic-nematic transition”and only obtained a nontrivial result in the smectic-A phase.Subsequent studies of aligned monodomain elastomers [10]also did not find any unusual effect in the nematic phase and ( *Present a ddress: The B P Institute, U niversity o f C ambridge, Cambridge CB3 0EZ, UK. ) ( Email address: emt1000@cam.ac.uk ) went on to investigate the mechanical effects in thesmectic-A phase. Some of the reasons that no exceptionaleffects were found in the nematic phase by [9,10] could bethat (i) the nematic region for the materials studied was only~7°and smectic pretransitional effects were important, and(ii) the authors aimed to plot the whole range of dynamicmodulus, including very high glassy values at low tempera-tures, thus masking a subtle nematic region. More recently[11], it has been theoretically demonstrated that a dramaticreduction of storage modulus G' and the associated increasein the loss factor tan 8 should be expected in monodomainnematic elastomers sheared in certain geometries (cf. Fig.3below). This effect has been indeed observed experimentally[12,13]. The analysis of“dynamic soft elasticity”allows oneto directly probe the basic equilibrium properties of nematicrubbers and also access the new kinetic parameters—viscouscoefficients and relaxation times. In this paper we examine this effect in some detail. Westudy three types of nematic elastomer materials, having es-sentially the same chemical structure and composition ofside-chain polysiloxane nematic polymer strands but differ-ent in the type of cross-linking. We establish the networkusing exactly the same concentration (by reacting bonds) ofdifunctional cross-linking groups that are (i) short flexibledimethylsiloxane chains, (ii) hydrocarbon divinyl alkeneben-zene units, and (iii) long chains of main-chain nematic poly-mer which create an additional (and very high) anisotropy inthe composite material. In all cases we prepare uniformlyaligned monodomainnematicnetworks—single-crystalliquid-crystal elastomers in the original terminology ofKupfer and Finkelmann [14]. An earlier paper [15] has re-ported some remarkable differences in equilibrium propertiesbetween these three groups of materials, summarized by thegreat variation ofthe effective backbone anisotropy of chainsmaking the rubbery network, expressed by a dimensionlessratio of principal step lengths along and perpendicular to thenematic director, r=ll, and the anisotropy of equilibriumrubber modulus for extensions along and perpendicular to n. Here we aim to establish a similar correlation between themicrostructure of the three materials and their dynamic-mechanical response. For an aligned monodomain nematic rubber we find a strong dependence on the displacement ori-entation. In the shear geometry where the director is forcedto rotate, the characteristic decrease of storage modulus andthe increase of loss are observed, while in the neutral “log-rolling” geometry the rubber responds as an isotropic elasticmedium. This key feature of dynamic soft elasticity is uni-versal, but the magnitude of the effect depends strongly onthe internal backbone anisotropy r and varies greatly be-tween the three materials. The most unexpected result is theresponse frequency dependence. Although the nematic rub-bers are known to have very slow relaxation modes, the ob-served increase in the internal mechanical dissipation is morepronounced at high frequencies. The traditional way to ana-lyze the dynamic mechanical thermal analysis and instru-ments (DMTA) data is by constructing master curves bytime-temperature superposition of measured response andextrapolating the data to either very long times or very highfrequencies [16]. In nematic rubbers, where the main effectsoccur due to the nematic transition, one cannot directly applysuch superposition, since the results at higher temperaturerepresent a completely different (isotropic) physical system. After briefly describing (in Sec. II) the material composi-tion, transition temperatures and the equilibrium anisotropy,in Sec. III we report on the detailed results of dynamic-mechanical measurements. Section IV is the discussion.where we bring the results together and compare with thetheory [11]. Finally, in the Conclusion, we speculate aboutthe possible applications of dynamic soft elasticity in twoareas of modern technology: the mechanical damping coat-ings of engineering components and the acoustic polarizationdevices. II. EXPERIMENT Samples of side-chain siloxane liquid-crystalline elas-tomers were prepared in the Cavendish Laboratory followingthe procedure of Finkelmann et al.[14,17,18], with three dif-ferent cross linkers. We would like to refer the reader to apreceding paper (on equilibrium properties of the same ma-terials) [15] for the chemical and preparation details, alsosummarized in Fig. 1 and Table I. One brief explanation ofcomposition choice is due here. Calculating the cross-linkingdensity by reacting bonds,as described above, could be quitedifferent from the actual concentration of the species in aresulting material. In particular, in the case of main chain(MC) polymer cross linker (75 rodlike monomers long), therelative gram weight in the otherwise side-chain polymermatrix is very high. One may equally regard such a systemas a main-chain nematic rubber network, end linked withrelatively small cross-linking groups made of side-chainnematic polysiloxane. The composition close to the border-line, when the overall mass of MC material in the network isapproximately equal to that of side-chain polysiloxane, isachieved for crosslinking by a combination of approximately1mol% of MC and 9 mo1% of 11UB. Accordingly, there aretwo MC-containing materials described in this articlethe“optimal”composition of (1 part MC and 9 parts 11UB),referred to as SiMC in Table I, and the fully-MC cross-linkednetwork, named SiMC10. Few practical results could be ob- FIG. 1. Schematic illustration of the materials used in this paper.(a) Siloxane backbone chain with Si-H groups reacting with 90mol % mesogenic phenyl-benzoate side groups, MBB and 10 mol %of divinyl cross-linking groups; (b) flexible siloxane chain, DSi(giving the SiF sample), flexible small-molecule 1,4 alkeneoxyben-zene, 11UB (resulting in the SiH material), and the main-chainnematic polymer of 1-biphenyl-2-phenyl butane, MC (giving thetwo SiMC materials). tained on SiMC10 because of its extremely slow responseand mechanical recovery, which we assert is due to the re-striction of chain mobility by sharp hairpins in the nematicphase of the MC polymer. Equilibrium transition temperatures given in the Table Iwere determined on a Perkin Elmer, Pyris 1 differential scan-ning calorimeter, extrapolating to low cooling rates. TheDMTA measurements were performed on a dedicated Me-travib RDS Viscoanaliser VA4000 in the shear sandwich ge-ometry. The DMTA device was calibrated prior to measure-ment. We used thin circularly cut samples, which wereapproximately 6 mm in diameter and 0.25 mm thick, mea-sured by micrometer individually for each sample. The am-plitude of the applied deformation was 10 um, making thesimple shear strain e=4.0%. The materials were studiedover a temperature range encompassing the glass and theclearing transitions (typically between -20 and 120℃).Both heating and cooling scans were performed at the tem-perature sweep rate of 1°C/min to allow extensive data col-lection over a wide range of frequencies (from 0.1 to 100Hz). The key output result of a DMTA measurement of vis-coelastic materials is the complex modulus G* depending onfrequency and temperature. For an oscillating shear experi-ment with an imposed strain, say 8xz=8gefωt, the complexmodulus is defined as G*(w)=0(w)/8xz=oo/ege, wherethe measured stress o(w)=oeiωte has a phase shift 8, themeasure of dissipation in the material. In the following sec-tion we present the results for two key characteristics: thereal part G’ of the complex modulus G*(w) (called thestorage modulus, a measure of elastic energy stored in thematerial) and the loss factor tan 8, at several selected fre-quencies, as a function of temperature. TABLE I. Proportions (in mol%) of cross linkers DSi, 11UB, and MC in the overall cross-linkingcomposition (of the fixed total of 10%), the corresponding volume fraction of the side-chain mesogenicpolymer (in wt.%), and temperatures of glass and nematic-isotropic transitions. The glass transition tempera-tures are approximate, with an error of at least ±5°. Samples %(DSi) %(11UB) %(MC) SC content Tg (℃) Ti(C) SiF 10 0 0 78% -3 SiH 0 10 0 87% 3 SiMC 0 9 1 42% SiMC10 0 0 10 7% 17 108 The slow heating and cooling rates allowed the linear dy-namic response to settle, even when it was changing rapidlywith temperature. However, the hard brittle nature of thematerials in the glassy phase often resulted in slip in theshear sandwich sample geometry. Therefore, only data some10 or more degrees above the glass transition T are consid-ered reliable. However, since we are principally concernedwith liquid-crystalline effects that occur at high tempera-tures, these issues did not constitute a problem for our paper. Figure 2 summarizes the equilibrium thermal expansiondata. The spontaneous change in length of the sample alongthe uniform nematic director n occurs on changing the tem-perature and, accordingly, the underlying nematic orderg(T). The measured length L(T) is normalized with respectto the constant sample length Lo in the isotropic state abovethe nematic transition temperature Tni, to provide the spon-taneous uniaxial deformation入th=L/Lo. Clearly, the differ-ence in cross-linker properties has a profound effect on themagnitude of spontaneous deformation. The earlier detailedstudy [15] has obtained a good linear relationship with theorder parameter, 山th=1+aO, but with1a2 very differentslope: the fitting gives a=0.08, 1.02, and 2.8 for the threesamples, SiF, SiH, and SiMC, respectively. The theory of FIG. 2. Thermal expansion data for monodomain polysiloxanenematic elastomers: SiF, SiH, SiMC, and SiMC10 (labeled on theplot). The data presents the effective anisotropy ratio r calculated asa cubic power of spontaneous uniaxial expansion, r=(L/L), oncooling of freely suspended rubber strips, cf. [15] for detail. Thelogarithmic scale of the r axis allows all data to be displayed on thesame graph. equilibrium ideal nematic elastomers [8] calculates this strainas a unique function of the effective mechanical anisotropyof polymer backbones of the network. This anisotropy isdirectly experimentally measured as, for instance, the ratio ofprincipal radii of gyration R/R_ (see, e.g.,[19]). The theoryuses the parameter r=l/l1, the ratio of principal steplengths of the ideal nematic network strand [equally, r=(R /R_)" for the principal gyration radii] and obtains thespontaneous deformation 入th=r3. In more complex non-ideal elastomers, the relation between the parameter r, calcu-lated from the uniaxial thermal expansion (L/L), and theprincipal chain step lengths may be less clearly defined. Nev-ertheless, the effective anisotropy of network backbone,r(T), has to be a function of nematic order; in the isotropicphase above Tni one recovers r=1. III. DMTA RESPONSE In a study of linear dynamic-mechanical response of mon-odomain nematic rubber, we shall examine the contrastingsimple shear geometries, as shown in Fig. 3. A geometry ofuniaxial extension, more commonly found in studies of equi-librium stress strain in elastomers, is less appropriate for anoscillating regime because of slow relaxation and incompletesample recovery on each cycle. The oscillating simple sheare(t), is externally 8xz(),applied to the sample. In our setup wewere able to examine and compare the response in the (D)displacement geometry, where one expects to find the signa-ture of internal director relaxation, and the “log-rolling”(V) FIG. 3. The geometry of simple shear with three principal ori-entations of the initial director n labeled G (for n along the sheargradient), D (displacement), and V (vorticity). The small-amplitudeshear 8 is applied to the elastomer and the measured stress (w)provides the linear-response modulus in each of the three configu-rations. FIG. 4. Linear dynamic-mechanical response of the weakly anisotropic SiF sample, (a) the SiH sample with the medium backboneanisotropy, and (b) the strongly anisotropic SiMC sample, (c) as a function of temperature. Raw values of storage shear modulus G’(logarithmic scale) at frequencies 0.1, 1, 10, and 100 Hz (labeled on plot); data are plotted for two geometries, D (symbols) and V(continuous lines). vorticity geometry, where the ideally aligned monodomainnematic rubber should not have any induced director rota-tion. A. Storage modulus G' Figure 4 presents the temperature dependence of storageelastic modulus G’at frequencies of 0.1, 1, 10, and 100 Hzfor the sample SiF having low-anisotropy (a), Si with themedium anisotropy (b), and SiMC with the high internalpolymer chain anisotropy (c). The storage modulus G’ fallswith increasing temperature, which is a typical characteristicof ordinary polymeric materials and simply reflects the de-parture from the glassy state. The modulus in the glassy re-gion, at the lowest temperature, could not be obtained as thevalue reached the maximum limit of force of the DMTAdevice (one expectsthetypical glassy values G'~1-10 GPa). At temperatures just below the nematic-isotropic transi-tion (Ti~68°C in SiF, for example) there is a clear evi-dence of an abrupt drop and in the modulus, which is ex-pected theoretically at low frequencies [11]. These dips inthe curves, characteristic of the dynamic soft elasticity, canonly be observed in the D-geometry orientation of shear,where the deformation geometry involves the internal direc-tor relaxation. The dips are becoming clearer and sharperwhen the effective anisotropy of the sample is getting higher,i.e., when moving to an SiH sample from the SiF. There is adifference in the behavior of SiMC in that the nematic tran-sition signature is not as abrupt in G'(T) variation; the tran-sition appears more diffuse. This is likely to be caused bythis effective anisotropy in SiMC which is an average be-tween the two very different components in the composite; itcontains side-chain and main-chain nematic polymers in ap-proximately equal proportion. We shall discuss this pointlater, in the following section. The same samples sheared inthe V geometry show no signs of these anomalies in G’ andbehave as ordinary isotropic rubbers. The contrast betweenthe response in D andV geometry is quite spectacular. How-ever the modulus in both cases converges to the same valueabove Tni and approaches the same glass plateau at low tem-peratures. The response at all frequencies behaves in thesimilar fashion, with higher frequencies giving the highermodulus (as would be expected) but masking the sharp dif- ference between the two shear geometries. Theehigh-temperature (isotropic)modulus is G’~0.002 MPa, or 2 kPa at 1 Hz for SiF; G’~0.005 MPa, or5 kPa for SiH (several times higher than for SiF) and ~0.2MPa or 200 kPa for SiMC (two orders of magnitude higherthan for SiF and SiH). The storage modulus G’is muchhigher in SiMC. The reason for this enhanced stiffness isthought to be due to main-chain entanglements—especiallythe hairpins, which restrict the chain mobility in the nematicphase [20,21]. On decreasing the temperature of the SiMCsample one finds a very rapid rise of G' towards its glassplateau value, which we attribute to this pronounced reduc-tion of chain mobility in the nematic phase. B. Ratio of storage modulus It is essential to separate the effects ofthe basic polymerglassy dynamics and the specific nematic anomalies. Oneway, suggested in [11], is to analyze the scaled nondimen-sional ratio G,/Gy of the moduli measured for the samesample in two geometries, e.g., D and V in Fig. 4. Figure 5shows the ratio of storage moduli in these two geometries,for several frequencies. As expected, this ratio approachesunity in the isotropic phase. At the nematic transition onefinds a very clear and universal drop in G’ with an evidentsuperposition of the critical behavior near Tmi. It is veryinteresting to note that the critical behavior in SiMC is muchmore diffuse-although the relative magnitude of the drop isvery high. This is likely to be caused by the composite mi-crostructure and the MC content in this composite material,whose effective anisotropy is an average between the twovery different components. Accordingly it is plausible thatthe storage modulus, especially at high frequencies, is notfully equilibrated and lags behind the would-be equilibriumcurve. C. Loss factor tan 8 Figure 6 presents the temperature variation of the lossfactor, tan 8=G"/G’(the ratio of imaginary and real parts ofG*. One is impressed by the record-high values of this fac-tor, describing the internal mechanical loss in the material. Inmost polymeric materials tan S is seldom higher than 0.1 andeven the characteristic loss peak at the glass transition is FIG. 5. Scaled nondimensional ratio G/Gy (linear scale) at frequencies 0.1, 1, 10, and 100 Hz for the SiF (a), SiH (b), and SiMC (C),showing the universal drop at the nematic transition and the frequency dependence predicted by the theory [11]. Note that the linear scalespans from 0 to 1 for SiH and from 0 to 4 in SiMC, in contrast to the SiF sample,where the axis is stretched to highlight the effect. usually nearly an order of magnitude lower than the valuesdisplayed in Fig. 6. One can also notice that the high internalloss is not a particular feature of any phase transformation(as it is the case with the characteristic glassy loss peak inordinary polymers and rubbers); in the whole region betweenthe Te and Tni the loss factor is consistently large. This isconsistent with the theoretical concept of dynamic soft elas-ticity [11], which says that the relaxation of internal degreeof freedom (the nematic director n) causes the softening andhigh dissipation over the whole nematic range. However, ifone follows the theoretical argument to its end, the expecta-tion would be that the loss factor reduces to its common lowvalues in the isotropic phase above Tni (just as the ratioG,/Gy becomes a unity). Instead, we notice that high dissi-pation persists even above the nematic transition, especiallypronounced at high frequencies. Still, there is a clear signa-ture of nematic phase transition, leading to the rapid en-hancement of internal mechanical dissipation in the nematicphase. The qualitative feature of the highest loss factor at highfrequencies is again reproduced in SiMC [Fig. 6(c)]. How-ever, there is a clearly nonmonotonic behavior at low fre-quencies, which has not been observed in either SiF or SiH.Since at high temperatures, above Tni, the loss factor be-haves as expected for an isotropic rubber, and the high-frequency tan 8 below Tni is the same as for SiF and SiH, wemust conclude that the reduced mobility of main-chainstrands is due to the reduction of dissipation at low frequen-cies. At around and above 100 Hz one does not expect that amajor backbone rearrangement can occur in the network and the mechanical dissipation should be determined by the vi-bration of bulky mesogenic side groups (organized along thelocal nematic director). There are fewer of such side groupsin SiMC and thus the overall amount of loss is somewhatlower. Nevertheless, the qualitative features are identical be-tween all three materials. In contrast, at low frequencies thenetwork strands begin responding to the imposed oscillatingstrain. Here we see a big difference between the flexible-chain SiF and SiH on the one side, and SiMC on the other. Inthe latter, the main-chain polymers fold into hairpins in thenematic phase and restrict the internal mobility. In fact, thisis the reason we do not present the dynamic-mechanical datafor the fully main-chain SiMC10; in spite of all efforts wecould not obtain any meaningful response at low frequenciesat all. It is unfortunate that our experimental DMTA appara-tus was unable to test even higher frequencies; in the Con-clusion section we shall discuss the possible ways of ex-trapolating the predictions into the high-frequency region. IV. CONCLUSION In this paper we have demonstrated the highly anisotropicbehavior of three nematic liquid-crystalline elastomers tosmall-amplitude oscillatory shear. The type of network crosslinker makes a significant difference in the equilibrium prop-erties of these elastomers, in particular, in their effective an-isotropy. In contrast, the observed dynamic-mechanical be-havior is very similar. Apart from1somequantitativedifferences (most noticeable in the “bare”magnitude of thestorage modulus G') the main features of composite materi- FIG. 6. The loss factor tan 8=G"/G', for the SiF sample (a), SiH sample (b), and SiMC sample (c) in the D geometry, at frequencies 1,10, and 100 Hz. The high-frequency curve in SiMC is very similar to that of SiH (with a certain overall magnitude reduction). The internalmechanical loss in SiMC is nonmonotonic at loss frequencies, with an unexpected reduction just below Ti (see text). als SiF, SiH, and SiMC are very similar. The universality ofdynamic soft elasticity is best represented by the scaledmodulus ratio, which to a large extent eliminates the depen-dence on the underlying polymer glassy dynamics. These marked effects are nearly independent of the natureofthe polymer backbone. We reiterate that the observed ef-fects are based on the physics of dynamic soft elasticity, dueto the internal relaxation of nematic director, and has nothingto do with traditional mechanisms of damping in polymericsystems [16]. At first glance, one is concerned that the realand imaginary parts of the complex modulus G* do not seemto satisfy the Kramers-Kronig relation, which would demandthe rise in G"(and thus tan 8) in response to a rapid rise inG’. The fact that we have a consistently high loss over thewhole nematic region, where G’behaves nonmonotonically,is most likely the indicator of the fact that the dynamic-mechanical response is not linear. Indeed, even the equilib-rium theory predicts a soft-elasticity effect of strain-dependent drop in the modulus in the D geometry where theinternal director rotation occurs. We assume the phenomenonis the same in the oscillating dynamic regime and, thus, thestandard linear-response arguments should not directly applyto the results. This paper demonstrates the potential for nematic liquid-crystalline elastomers in mechanical damping applications.These materials have very large loss factors over wide rangesof temperature and frequency. In particular, the highest dis-sipation was found at higher frequencies (≥100 Hz) which ispotentially very useful for many acoustic and vibration ( [ 1] W. Gleim a nd H . F inkelmann, i n S ide-Chain L iquid C rystal Polymers, edited b y C . B. McArdle (Blackie and So n s, Gl a s- gow, 1989). ) [2] G. G. Barclay and C. K. Ober, Prog. Polym. Sci. 18, 899(1993). ( [3] H. R. Brand and H . F inkelmann, in H andbook of Liquid Crys-tals , edited by D. Demus et al. (Wiley-VCH, W e inheim,1998). ) [4] E. M. Terentjev, J. Phys.: Condens. Matter 11, R239 (1999). [5] M. Warner, P. Bladon, and E. M. Terentjev, J. Phys. II 4, 91(1994). ( [6] L. Golubovic and T . C. L u bensky, P hys. R ev. L ett. 63, 1082 (1989). ) ( [7] P. D. Olmsted, J . Phys. I I 4, 2215 ( 1994). ) [8] M. Warner and E. M. Terentjev, Prog. Polym. Sci. 21, 853(1996). ( [9] J . L. Gallani, L. Hilliou, P . Martinoty, F . Doublet, and M .Mauzac, J . Phys. I I , 6, 443 ( 1996). ) ( [ 1 0] J. Weilepp, P. S tein, N. A ssfalg, H. F i nkelmann, P. Ma r tinoty,and H . R. Brand, E u rophys. Le t t. 47, 508 (1 9 9 9). ) ( [ 1 1] E. M. Terentjev a nd M. W a rner, Eur. Phys. J. E 4, 343 (2001). ) damping applications. Liquid-crystalline elastomer materialscan be prepared with several mesophases in the rubbery tem-perature region, and hence with a number ofphase transi-tions that could also give rise to critical fluctuations andmechanical loss. However, there are indications that thiswould not lead to more effective damping. In fact, the pres-ence of smectic phases has an effect of increasing mechani-cal rigidity and reducing the loss factor in comparison with apurely nematic material [22]. Another attractive physical property, with a high potentialin acoustic applications, is the anisotropy of dynamic softelasticity. As with its equilibrium counterpart, only some se-lected modes of deformation are affected. This may lead to awhole new technology of manipulating acoustic wave polar-ization in a similar way to the traditional optical birefrin-gence of liquid crystals. In nematic rubbers, acoustic shearwaves would be effectively dissipated when they propagatein the D or G geometry through a monodomain nematic rub-ber, but would pass through in the V geometry. ACKNOWLEDGMENTS The authors thank EPSRC (A.R.T.) and Bridgestone Cor-poration (A.H.) for funding this work, and Wacker Chemiefor the donation of the platinum catalyst. We are indebted toH. Finkelmann for the advice and assistance in chemicalpreparations. Many discussions with F. Elias, M.Warner, G.R. Tomlinson, and C. Remillat are gratefully appreciated. ( [ 1 2] S. M. Clarke, A. R . T ajbakhsh, E. M. Terentjev, a nd M. Warner, P hys. R ev. L ett. 86, 4044 (2001). ) ( [ 1 3] P. Stein, N. Assfalg, H . Finkelmann, an d P. M ar t inoty, Eur . Phys. J. E 4, 255,262 ( 2001). ) ( [ 1 4] J. Kupfer and H. Finkelmann, Macromol. Chem. Phys. 1 95,1353 (1994). ) [15] S. M. Clarke, A. Hotta, A. R. Tajbakhsh, and E. M. Terentjev,Phys. Rev. E 64, 061702 (2001). ( [ 1 6] J. D. Ferry, Viscoelastic Properties of Polymers(Wiley, Ne w York, 1980). ) [17] H. Finkelmann, A. Greve, and M. Warner, Eur. Phys. J. E 5,281(2001). [18] H. Wermterr aandH. eFinkelmann, e-Ploymers (Www.e-polymers.org), No. 013 281 (2001). [19]V. Castelletto, L. Noirez, and P. Vigoureux, Europhys. Lett. 52,392 (2000). [20] F. Elias, S. M. Clarke, R. Peck, and E. M. Terentjev, Europhys.Lett. 47, 442 (1999). [21] A. R. Tajbakhsh and E. M. Terentjev, Eur. Phys. J. E, 6, 181(2001). [22] S. M. Clarke, A. R. Tajbakhsh, E. M. Terentjev, C. Remillat, G.R. Tomlinson, and J. R. House, J. Appl. Phys. 89, 6530 (2001). ///$The American Physical Society
确定


还剩4页未读,是否继续阅读?


仪尊科技有限公司为您提供《动态力学性能中向列式弹性体交联分布的影响检测方案(动态热机械)》,该方案主要用于其他中向列式弹性体交联分布的影响检测,参考标准--,《动态力学性能中向列式弹性体交联分布的影响检测方案(动态热机械)》用到的仪器有动态热机械分析仪
推荐专场





相关方案
更多