推荐厂家
暂无
暂无
 400-895-0897
400-895-0897
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-860-5168转1766
留言咨询
400-860-5168转1766
留言咨询
 400-860-5168转6134
留言咨询
400-860-5168转6134
留言咨询
 400-860-5168转6117
留言咨询
400-860-5168转6117
留言咨询
但愿我找对地方了,请大神们支招!各种金属材质,表面有微坑,直径从几十微米到几百微米,深度也深浅不一,估计有一百到几百微米就是想看看微坑的三维形貌,比如坑是圆柱形还是圆锥形用SEM试过不行,因为高度差比较大,成像只能在某一层上,其他高度都虚化了不知AFM可以不,要获得真实形貌,而不是通过软件合成之类的谢谢了,另:如果不行,有没有其他设备可以实现
我有一晶体材料,导电性几乎为无,在表面喷镀一层银后做SEM效果也不好,利用专门做不导电晶体的环境扫描仪效果也不好,不知道还有什么检测设备可以获得表面的三维形貌?谢谢!
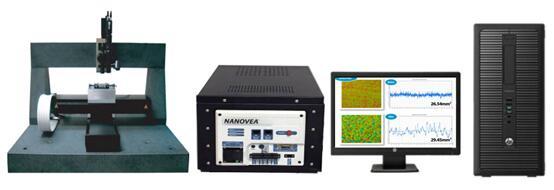
哪儿有光学轮廓仪,可以表征三维形貌及纵向深度?谢谢了。。。










 我要推广仪器
我要推广仪器
 下载APP
下载APP





