视频号

抖音号

哔哩哔哩号

前沿资讯手机看

北京矿冶研究总院测试研究所研究员,原研究所所长。


分享到微信朋友圈
打开微信,点击底部的“发现”,
使用“扫一扫”即可将网页分享到朋友圈。
有用的工具还是小玩具?
• 克斯汀·瑟罗(Kerstin Thurow)
关于协作机器人的炒作真的有道理吗?Thurows 为您提供了她对该主题的看法。
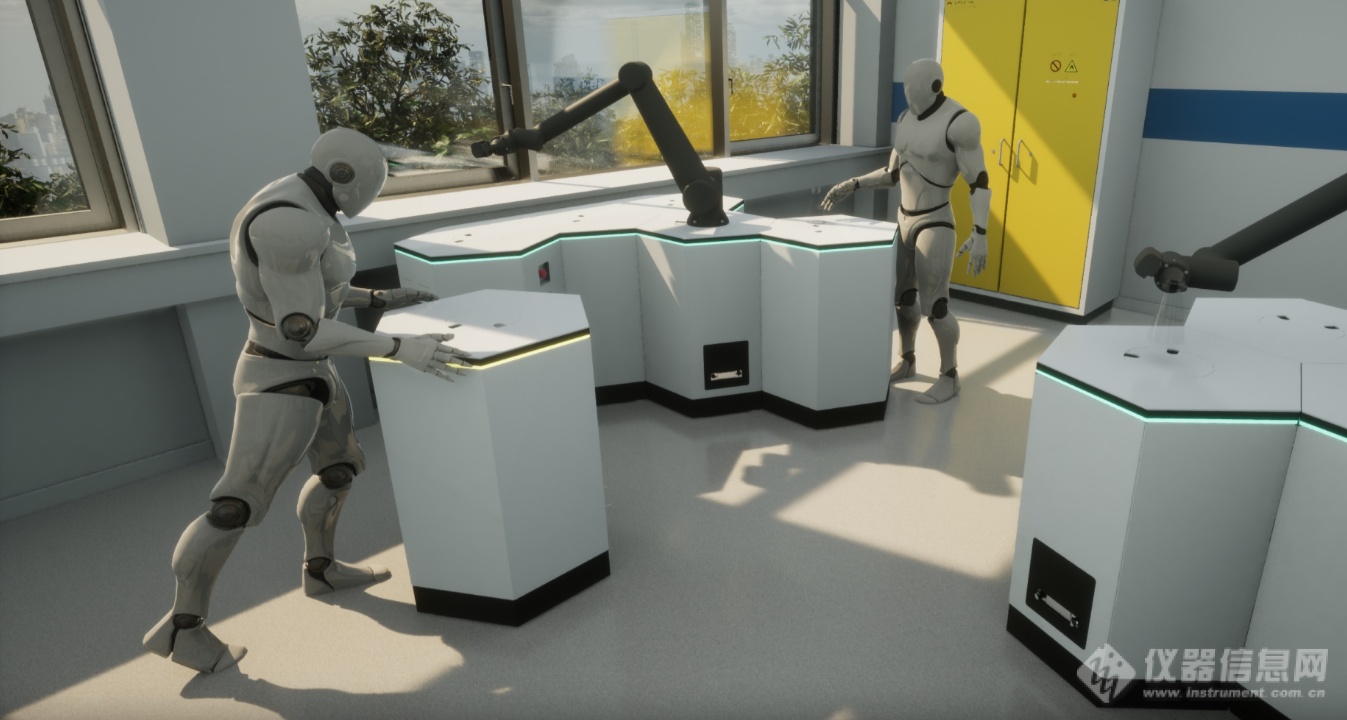
我们目前正在经历一场真正的协作机器人炒作。像谷歌这样的搜索引擎现在提供超过 861,000 个结果。今天每个人都在谈论协作机器人,他们对实验室自动化的兴趣也越来越大。但什么是协作机器人?它们是实验室自动化中真正有用的工具还是只是一个不错的玩具?
“cobot”一词是“collaborative robot”的缩写,基本上是指在生产过程中不脱离人类,而是与人类一起工作的工业机器人。在 1997 年的专利中,JE Colgate 和 MA Peshkin 对协作机器人的定义如下 [1]:
“一种在人与计算机控制的通用机械手之间进行直接物理交互的装置和方法”
协作机器人的出现是经典工业机器人的重大进一步发展,它们通常完全独立于人工作。通过集成众多提高安全性的传感器(例如,在接触障碍物时关闭),协作机器人可以靠近人类工作或直接与人类一起工作。因此,可以省去昂贵的保护装置,例如外壳或光栅/光幕。标准 ISO 1028 第 1/2 部分以及 ISO / TS 15066 的当前版本也定义了协作机器人的安全要求 [2]、[3]、[4]。
协作机器人将机器人的经典优势(如动力、高精度和可重复性和耐力)与人类特征(如经验、创造力或总体概况)相结合,开辟了全新的可能性和应用。
合作?
即使“cobot”一词源自协作一词,但人与机器人之间真正的协作也只是最接近的协作形式。人类和机器人在没有庇护所的情况下近距离工作的共存是最常见的,但人类和机器人不共享工作空间。如果人类和机器人共享一个工作空间,我们就称之为合作。这可以是例如转移站,人们转移零件、工件或样品,以便机器人可以拾取它们。人类和机器人在公共空间工作,但工作时间不同。最接近的操作模式是协作,其中人类和机器人同时在零件/工件上工作(尽管两者执行不同的任务)。
近年来,许多协作机器人进入市场,最初以更通用的名称“轻型机器人”命名。Kuka、Universal Robots、ABB、Rethink、Kawasaki、Yaskawa、Franka Emika 或 Denso 等公司如今提供众多系统。
协作机器人在实验室自动化中有多重要?由于其轻质结构,它们具有许多优点。实验室应用通常没有传统工业领域中存在的负载能力要求。传统的工业机器人通常在实验室中设计过度。这也对机器人系统的价格产生了重大影响。现代协作机器人是功能强大的系统,其特点还在于价格适中。可能省略安全外壳和光栅也是一个优势。因此,基于协作机器人的自动化系统占用的空间更少,并且还允许更灵活地使用集成的子组件,例如光学读取器、离心机或分析测量系统(GC、LC、MS),如果它们未在机器人过程中使用的话。
但是协作机器人真的可以在实验室中以协作方式使用吗?不太可能。机器人和人类一起完成一项特定任务的流程数量可能非常少。很难想象移液、称重、摇动、提取或记录测量值等经典实验室工作将由人类和机器人一起处理。合作与共存仍然是可能的合作形式。在后者中,协作机器人用于自动化系统,其中在以前的概念中使用了经典的工业机器人。自动化的总体概念没有改变。由于成本较低,样品制备和测量技术的自动化现在可以在以前由于成本原因没有使用自动化的新领域实现。这使得实验室过程的自动化对中小型公司和研究机构来说越来越有趣和负担得起。在这里,灵活的全自动系统(自动化生产线)将成为关注的焦点,以便能够以更优惠的价格处理更多的样品。但需要注意的是,并不是所有的机器人都配备了合适的控制软件。软件组件可以从外部公司购买或必须在内部开发。根据任务的范围,可能会产生相当大的成本。
更多协作机器人——更多问题?
由于协作机器人的成本低,原则上也可以设想为不同的实验室设备配备机器人。特别是在测量系统、液体处理系统、振动器、加热器和其他实验室设备的情况下,这些设备可以充当传输单元,并将人工放置的样品输送到相应的设备,或者在相应的处理时间结束后再次取出它们已到期。这对应于合作模式,将使实验室工作变得相当容易。现有的实验室环境和结构可以得到很大程度的保留,不需要进行大规模的改造。使用此方法需要考虑几件事情。如果很多实验室设备要配备机器人,需要的协作机器人数量多,投资和维护成本高。
然而,最大的问题是系统的控制。需要上级控制系统,特别是如果必须在多个站点处理样品并且必须管理和控制多个机器人和实验室设备。根据所需的选项范围和灵活性,这些工作流管理系统可能很快变得非常广泛,因此也很昂贵。
概括
那么当前的协作机器人炒作真的有道理吗?协作机器人是经典工业机器人的合理和合乎逻辑的进一步发展。它们的可能用途和使用类型(共存、合作、协作)在很大程度上取决于各自的应用。在实验室自动化领域,由于任务和要求,前两种可能性在未来几年肯定会盛行。在合作领域,一种特殊形式的协作机器人对不同的实验室站和站之间的运输很有意义:移动机器人。它们既可以只实现不同站点之间的传输任务,也可以接管向各个实验室设备供应样品。这可以限制所需机器人的总数。然而,对工作流程管理系统的要求仍然存在,并且因流动部分而额外增加。移动机器人目前被用于自动化领域。由于成本高(与经典工业机器人相比),它们还不是真正的替代品。
参考文献:
[1] Colgate, J. E.; Peshkin, M. A.: Cobots. US Patent US 5952796 A. 14.09.1999 (https://www.google.com/patents/US5952796 )
[2] ISO 10218-1:2011-07 Industrieroboter - Sicherheitsanforderungen - Teil 1: Roboter2011-0
[3]DIN EN ISO 10218-2:2012-06 Industrieroboter - Sicherheitsanforderungen - Teil 2: Robotersysteme und Integration (ISO 10218-2:2011)
[4]DIN ISO/TS 15066:2017-04;DIN SPEC 5306:2017-04 Roboter und Robotikgeräte - Kollaborierende Roboter (ISO/TS 15066:2016)
关于作者
克斯汀·瑟罗(Kerstin Thurow)
生命科学自动化中心,罗斯托克大学,罗斯托克,德国
Kerstin Thurow 学习化学,并于 1995 年获得慕尼黑路德维希马克西米利安大学的博士学位。1999 年,她获得了测量和控制工程专业的资格。同年,她被任命为罗斯托克大学工程学院“实验室自动化”教授。自 2004 年以来,她一直担任罗斯托克大学“自动化技术/生命科学自动化”的主席,并且是生命科学自动化中心(罗斯托克大学)的主任。她的研究课题包括生命科学过程的自动化、机器人技术、移动机器人技术以及系统集成和系统工程。
原载:威利分析科学 Cobots in the Analytical Laboratory
供稿:符 斌,北京中实国金国际实验室能力验证研究有限公司
[来源:仪器信息网] 未经授权不得转载

大力发展我国机器人产业 《“机器人+”应用行动实施方案》政策发布
2023.01.28

2023.01.03
2024.07.12

2024.07.12

2024.07.12

2024.07.12
品牌合作伙伴






























版权与免责声明:
① 凡本网注明"来源:仪器信息网"的所有作品,版权均属于仪器信息网,未经本网授权不得转载、摘编或利用其它方式使用。已获本网授权的作品,应在授权范围内使用,并注明"来源:仪器信息网"。违者本网将追究相关法律责任。
② 本网凡注明"来源:xxx(非本网)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。如其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
③ 如涉及作品内容、版权等问题,请在作品发表之日起两周内与本网联系,否则视为默认仪器信息网有权转载。
![]() 谢谢您的赞赏,您的鼓励是我前进的动力~
谢谢您的赞赏,您的鼓励是我前进的动力~
打赏失败了~
评论成功+4积分
评论成功,积分获取达到限制
![]() 投票成功~
投票成功~
投票失败了~