推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询





(1)光栅尺传感器与数显表插头座插拔时应关闭电源后进行。 (2)尽可能外加保护罩,并及时清理溅落在尺上的切屑和油液,严格防止任何异物进入光栅尺传感器壳体内部。 (3)定期检查各安装联接螺钉是否松动。 (4)为延长防尘密封条的寿命,可在密封条上均匀涂上一薄层硅油,注意勿溅落在玻璃光栅刻划面上。 (5)为保证光栅尺传感器使用的可靠性,可每隔一定时间用乙醇混合液(各50%)清洗擦拭光栅尺面及指示光栅面,保持玻璃光栅尺面清洁。 (6)光栅尺传感器严禁剧烈震动及摔打,以免破坏光栅尺,如光栅尺断裂,光栅尺传感器即失效了。 (7)不要自行拆开光栅尺传感器,更不能任意改动主栅尺与副栅尺的相对间距,否则一方面可能破坏光栅尺传感器的精度;另一方面还可能造成主栅尺与副栅尺的相对摩擦,损坏铬层也就损坏了栅线,以而造成光栅尺报废。 (8)应注意防止油污及水污染光栅尺面,以免破坏光栅尺线条纹分布,引起测量误差。 (9)光栅尺传感器应尽量避免在有严重腐蚀作用的环境中工作,以免腐蚀光栅铬层及光栅尺表面,破坏光栅尺质量
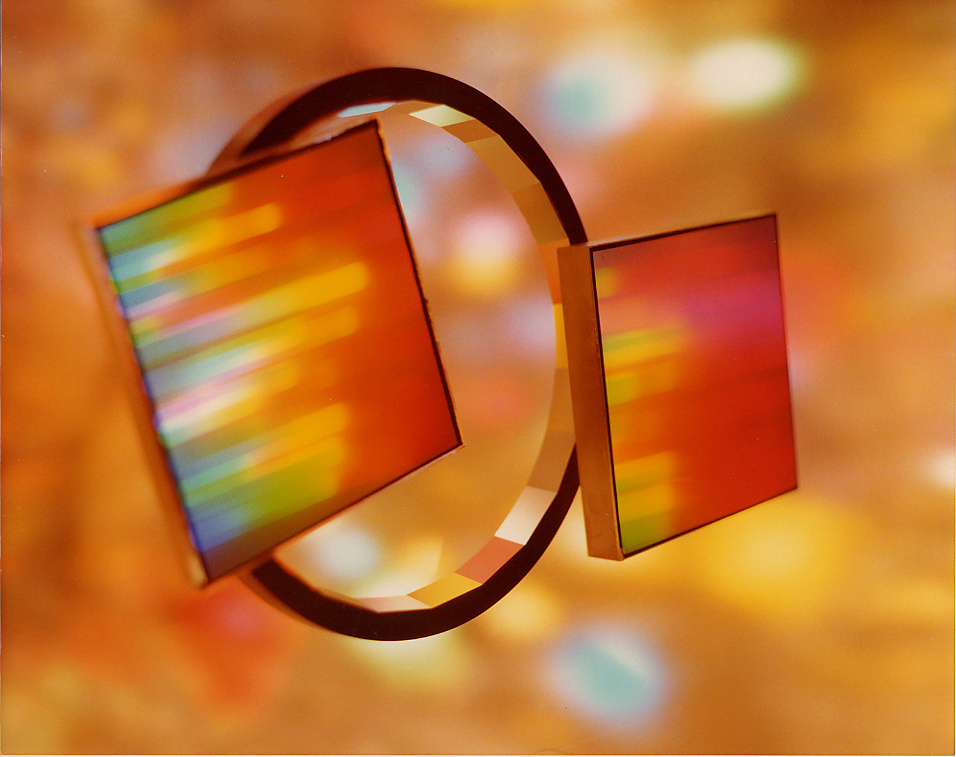
光栅尺——利用光的干涉和衍射原理制作而成的传感器。当两块栅距相同的光栅叠放在一起,同时让线纹构成一微小角度,这时在平行光照射下,与刻线垂直方向上就能看到对称分布的明暗相间的条纹,称为莫尔条纹,因此莫尔条纹是光的衍射和干涉作用的总效果。当光栅移动一个小栅距时,莫尔条纹随之移动一个条纹间距,这样,我们测量莫尔条纹的宽度就比测量光栅线纹宽度容易的多。此外,由于每条莫尔条纹都是由许多光栅线纹的交点组成,当线纹中有一条线纹有误差时(间距不等或倾斜),这条有误差的线纹和另一光栅线纹的交点位置将产生变化。但是,一条莫尔条纹是由许多光栅线纹交点组成,因此,一个线纹交点位置的变化,对于一条莫尔条纹来讲其影响就非常小了,所以莫尔条纹可以起到放大和平均的作用。磁栅尺——利用磁极的原理制作而成的传感器。基尺是被均匀磁化的钢带。S和N极均匀间隔排列在钢带上,通过读数头读取S,N极的变化来记数。 光栅尺受温度影响较大,一般使用环境在40摄士度以下。(三坐标测量机一般都要求在恒温横湿环境下测量,保证测量精度。 敞开式磁栅尺容易受磁场影响,封闭式磁栅尺则无此困扰,但成本较高。www.jnguangyu.com
光栅尺工作原理及详细介绍光栅:光栅是结合数码科技与传统印刷的技术,能在特制的胶片上显现不同的特殊效果。在平面上展示栩栩如生的立体世界,电影般的流畅动画片段,匪夷所思的幻变效果。 光栅是一张由条状透镜组成的薄片,当我们从镜头的一边看过去,将看到在薄片另一面上的一条很细的线条上的图像,而这条线的位置则由观察角度来决定。如果我们将这数幅在不同线条上的图像,对应于每个透镜的宽度,分别按顺序分行排列印刷在光栅薄片的背面上,当我们从不同角度通过透镜观察,将看到不同的图像。 光栅尺:其实起到的作用是对刀具和工件的坐标起一个检测的作用,在数控机床中常用来观察其是否走刀有误差,以起到一个补偿刀具的运动的误差的补偿作用,其实就象人眼睛看到我切割偏没偏的作用,然后可以给手起到一个是否要调整我是否要改变用力的标准。 【相当于眼睛】 一、引言 目前在精密机加工和数控机库中采用的精密位称数控系统框图。 随着电子技术和单片机技术的发展,光栅传感器在位移测量系统得到广泛应用,并逐步向智能化方向转化。 利用光栅传感器构成的位移量自动测量系统原理示意图。该系统采用光栅移动产生的莫尔条纹与电子电路以及单片机相结合来完成对位移量的自动测量,它具有判别光栅移动方向、预置初值、实现自动定位控制及过限报警、自检和掉电保护以及温度误差修正等功能。下面对该系统的工作原理及设计思想作以下介绍。 二、电子细分与判向电路 光栅测量位移的实质是以光栅栅距为一把标准尺子对位称量进行测量。目前高分辨率的光栅尺一般造价较贵,且制造困难。为了提高系统分辨率,需要对莫尔条纹进行细分,本系统采用了电子细分方法。当两块光栅以微小倾角重叠时,在与光栅刻线大致垂直的方向上就会产生莫尔条纹,随着光栅的移动,莫尔条纹也随之上下移动。这样就把对光栅栅距的测量转换为对莫尔条纹个数的测量,同量莫尔条纹又具有光学放大作用,其放大倍数为 : (1) 式中:W为莫尔条纹宽度;d为光栅栅距(节距);θ为两块光栅的夹角,rad 在一个莫尔条纹宽度内,按照一定间隔放置4个光电器件就能实现电子细分与羊向功能。本系统采用的光栅尺栅线为50线对/mm,其光栅栅距为0.02mm,若采用四细分后便可得到分辨率为5μm的计数脉冲,这在一般工业测控中已达到了很高精度。由于位移是一个矢量,即要检测其大小,又要检测其方向,因此至少需要两路相位不同的光电信号。为了消除共模干扰、直流分量和偶次谐波,我们采用了由低漂移运放构成的差分放大器。由4个滏电器件获得的4路光电信号分别送到2只差分放大器输入端,从差分放大器输出的两路信号其相位差为π/2,为得到判向和计数脉冲,需对这两路信号进行整形,首先把它们整形为占空比为1:1的方波,经由两个与或非门74LS54芯片组成的四细分判向电路输入可逆计数器,最后送入由8031组成的单片机系统中进行处理。 三、单片机与接口电路 为实现可逆计数和提高测量速度,系统采用了193可逆计数器。假设工作平台运行速度为v,光栅传感器栅距为d,细分数为N,则计数脉冲的频率为: (2) 若v=1m/s,d=20μm,N=20,则f=1MHz,对应计数时间间隔为[font=Times New Roman








 我要推广仪器
我要推广仪器
 下载APP
下载APP