推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-860-5168转1679
留言咨询
400-860-5168转1679
留言咨询
 400-860-5168转4306
留言咨询
400-860-5168转4306
留言咨询
 400-860-5168转0875
留言咨询
400-860-5168转0875
留言咨询

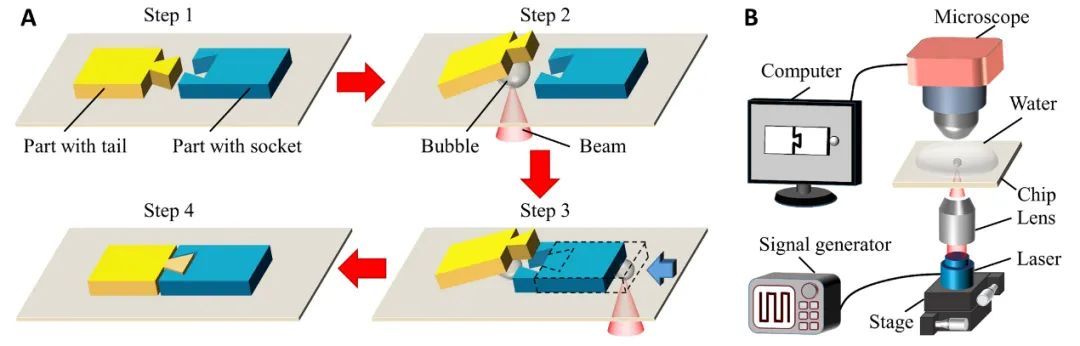
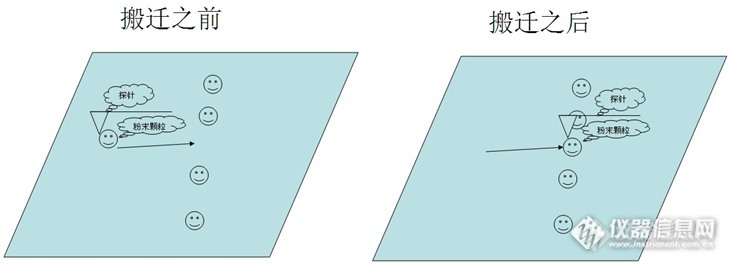
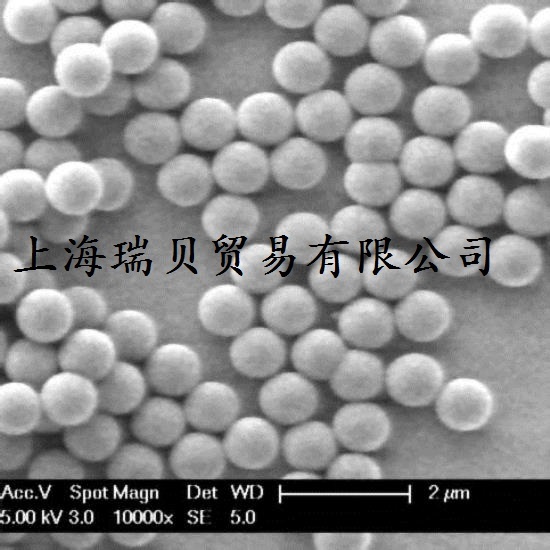
1.实验讲叙:纳米操纵是搬运纳米零件、组装纳米器件、最终实现纳米制造的基础工艺技术。纳米尺度空间所涉及的物理层次,是即非宏观又非微观的相对独立的中间领域,被人称之为介观研究领域。它是在纳米空间尺度内操纵原子和分子,对材料进行加工,制造有特定功能的产品或对某物质进行研究。掌握其原子、分子的运动规律和特性的崭新高技术科学。同时也是现代科学和现代技术结合的产物。本文讲叙以某种纳米粉末颗粒为试验材料,基于SPM的Nanoman(纳米操纵)技术上对纳米颗粒进行神奇搬迁拼图的全过程。2.实验仪器:采用bruker(布鲁克)公司的扫描探针显微镜(型号:Nanoman VS)3.实验材料:未知的纳米颗粒平均宽度170nm,高度44nm4.实验原理:通过探针对纳米颗粒拨动达到使粉末颗粒搬迁,如图http://ng1.17img.cn/bbsfiles/images/2013/11/201311202204_478477_2224533_3.jpg
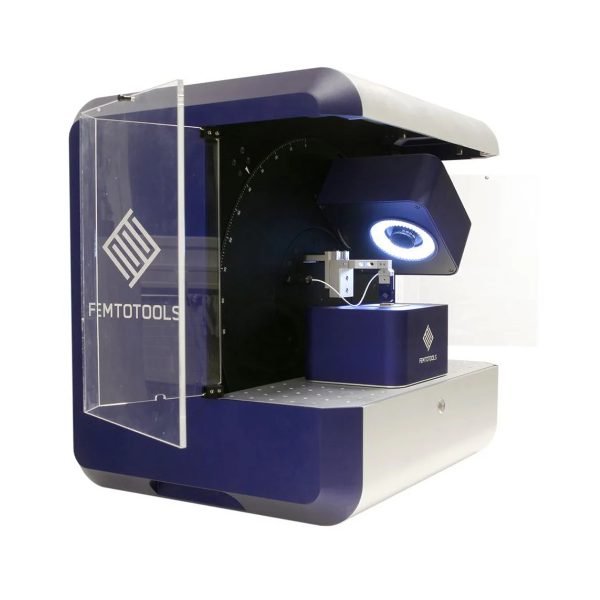
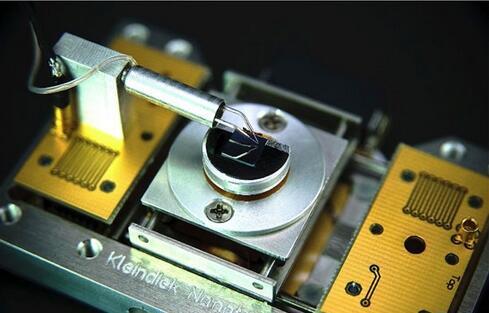
[url=http://www.f-lab.cn/micromanipulators/liftout-shuttle.html][b]Kleindiek纳米操纵仪[/b][/url]是为外部电子显微学制备样品而设计的超精密[b]样品拾取装卸[/b]系统,它在纳米尺度灵活[b]微操纵样品[/b]。[b]Kleindiek纳米操纵仪安装[/b]安装有一根微夹钳,一个四轴辅台,在表面有一个允许快速接近的小型CCD摄像头。Kleindiek纳米操纵仪是由安装在一个超小型平台上的一个四轴辅台构成。在辅台上安装了一个微夹钳,促进提取。操作该辅台将预切样品放置在微夹钳下。在这之后,微夹钳夹住样品并轻轻地固定住样品,固定要足够牢固,只要使辅台向旁边下落,就可以将样品从大量材料提取出。一旦分离,在TEM网格上,将样品与SEM兼容胶水接触,并且用离子束固化。[img=纳米操纵仪]http://www.f-lab.cn/Upload/SY-LOS-L_.jpg[/img][url=http://www.f-lab.cn/micromanipulators/liftout-shuttle.html][b]Kleindiek纳米操纵仪[/b][/url]规格:[list][*]取样室兼容平台上的辅台[*]最大样品尺寸:30mm[*]行程:X和Y =10mm[*]行程:Z轴为3mm[*]行程:R =360°(无限)[*]速度:可达1mm/秒[*]分辨率:0.5nm[*]笛卡尔运动[*]没有反弹或翻转[*]是大多数SEM和FIB工具的简单取样室装置[*]几乎不受震动影响[*]微夹钳[*]运输和组装微型物体的高分辨率夹持器[*]抓握区域:(5至10 µ m)[*]分辨率:20nm[*]夹持力:5至5000μN(变量)[*]最大跨度范围:20〜 40 µ m[*]SemCam[*]样品表层的小相机[*]允许快速接近[*]包括显示器和LED照明[/list]
谁用过纳米操纵手,就是德国kleindiek的,交流下经验啊~









 我要推广仪器
我要推广仪器
 下载APP
下载APP