推荐厂家
暂无
暂无
 金牌22年
金牌22年
 400-860-5168转0185
400-860-5168转0185
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-860-5168转0185
留言咨询
400-860-5168转0185
留言咨询
 400-860-5168转0185
留言咨询
400-860-5168转0185
留言咨询
 400-860-5168转4388
留言咨询
400-860-5168转4388
留言咨询


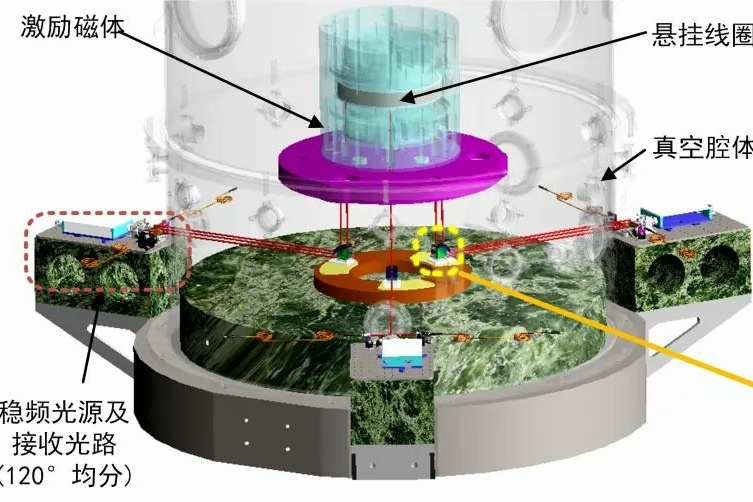



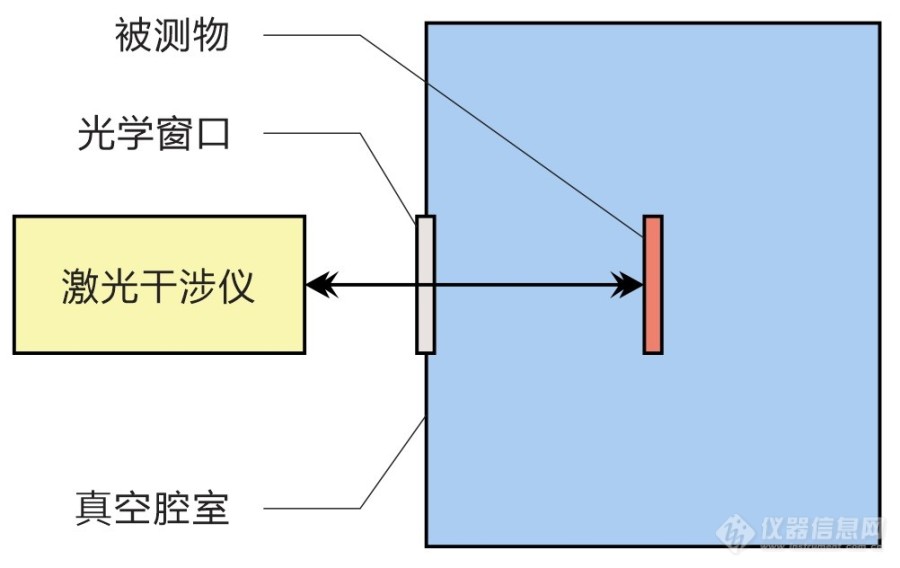
[color=#990000]摘要:在迈克尔逊激光干涉仪微位移和倾角的精密测量中,需要对真空度进行准确控制,否则会因变形、折射率和温度等因素的影响带来巨大波动,甚至会造成测量无法进行。本文介绍了真空度的自动化控制技术,详细介绍了具体实施方案。[/color][size=18px][color=#990000]一、问题的提示[/color][/size] 作为一种高精密光学仪器,迈克尔逊激光干涉仪得到了非常广阔应用,它可用于测量波长、气体或液体折射率、厚度、位移和倾角,具备对长度、速度、角度、平面度、直线度和垂直度等的高精密测量。但在高精密测量中,迈克尔逊干涉仪会受到气氛环境的严重影响,为此一般将被测物放置在低压真空环境中,如图1所示,并对真空度进行精密控制,否则会带来以下问题:[align=center][color=#990000][img=激光干涉仪真空度控制,500,315]https://ng1.17img.cn/bbsfiles/images/2022/01/202201270813137507_5730_3384_3.jpg!w690x435.jpg[/img][/color][/align][color=#990000][/color][align=center]图1 迈克尔逊激光干涉仪典型测试系统结构[/align] (1)测试环境的气体折射率波动,会对高精密测量带来严重影响。如果采用专门的气体折射率修正装置,测量精度也只能达到微米或亚微米量级,而无法实现更高精度的测量。 (2)如果真空腔室内有温度变化,腔室内的气压也会剧烈变化,相应折射率也会发生剧烈波动而严重影响干涉仪测量。 (3)在抽真空过程中,内外压差会造成真空腔室的微小变形,同时也会造成光学窗口产生位移和倾斜,从而改变测量光路的光程。 (4)在有些变温要求的测试领域,要求被测物能尽快的被加热和温度均匀,这就要求将真空度控制在一定水平,如100Pa左右,由此来保留对流和热导热传递能力。 总之,在迈克尔逊激光干涉仪微位移和倾角的精密测量中,需要对真空度进行准确控制。本文将介绍真空度的自动化控制技术以及具体实施方案。[size=18px][color=#990000]二、实施方案[/color][/size] 迈克尔逊激光干涉仪测试过程中,真空度一般恒定控制在100kPa左右,并不随温度发生改变。为此,拟采用如图2所示的真空度控制系统进行实施,具体内容如下:[align=center][color=#990000][img=激光干涉仪真空度控制,690,411]https://ng1.17img.cn/bbsfiles/images/2022/01/202201270813484950_7314_3384_3.jpg!w690x411.jpg[/img][/color][/align][align=center][color=#990000]图2 迈克尔逊激光干涉仪测试真空度控制系统结构[/color][/align] (1)采用1torr量程的电容真空计进行真空度测量,其精度可达±0.2%。 (2)采用24位A/D采集的高精度PID真空压力控制器,以匹配高精度真空压力传感器的测量精度,并保证控制精度。 (3)在真空腔室的进气口安装步进电机比例阀以精密调节进气流量。 (4)控制过程中,真空泵开启后全速抽取并保持抽速不变。然后对控制器进行PID参数自整定,使控制器自动调节比例阀的微小开度变化实现腔室真空度的精确控制。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]

激光干涉仪具有测量精度高、测量范围大、测量速度快、最高测速下分辨率高等优点,结合不同的光学镜组,可实现线性测长、角度、直线度、垂直度、平行度、平面度等几何参量的高精度测量。在SJ6000激光干涉仪动态测量软件配合下,可实现线性位移、角度和直线度的动态测量与性能检测,以及进行位移、速度、加速度、振幅与频率的动态分析,如振动分析、丝杆导轨的动态特性分析、驱动系统的响应特性分析等。[align=center][img=,578,450]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201754505855_5264_3712_3.jpg!w578x450.jpg[/img][/align] 激光干涉仪最典型的应用就是测量机床精度,本文讲解如何使用激光干涉仪测量五轴机床平移轴直线度误差。 对于平移轴而言,每根轴均有两个直线度误差,因此三根轴有六个直线度误差,均可采用激光干涉仪分别测得。 原理:带有圆孔的是直线度干涉镜,其与待测轴相连一同运动;长条镜是直线度反射镜静止安装,其是对称结构,上下左右均对称。当一束激光从源头发出射入干涉镜,干涉镜将光束分成两束,形成一个很小的角度分别去往反射镜,由于反射镜上下对称,因此两束光被反射后又回到干涉镜,汇合成一股光束,去往激光头的探测器。当运动轴产生直线度误差时,会使得干涉镜相对于反射镜在水平横向方向发生相对运动,而反射镜是左右对称的(左右的镜片不在同一平面,有一定的角度),因此会使得两束分开的光束光程具有差别,根据此差别,即可测得运动轴产生的直线度误差。[align=center][img=,678,333]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755021895_7221_3712_3.jpg!w678x333.jpg[/img][/align][align=center]▲ 直线度测量的光路原理构建图[/align][align=center][img=,678,367]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755111914_6482_3712_3.jpg!w678x367.jpg[/img][/align][align=center]▲ 运动轴的横向直线度测量示意图[/align][align=center][img=,678,367]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755345695_9383_3712_3.jpg!w678x367.jpg[/img][/align][align=center]▲ 运动轴的纵向直线度测量示意图[/align] 根据直线度误差测量原理可知,测量过程中不可避免的会引入斜率误差。该误差是由于测量直线度反射镜的光学轴线最初与待测轴不平行,为调整平行而引起的。如图 所示,A 为干涉镜和反射镜的距离,B 为激光头到干涉镜的距离(其中干涉镜是固定在运动轴上的)。在一开始,反射镜的光学轴线处于旋转前的位置,而由于机床运动轴与其之间存在的夹角θ,[img]http://www.chotest.com/Upload/2019/10/201910173125514.jpg[/img][align=center][img]http://www.chotest.com/Upload/2019/10/201910177031118.png[/img][/align] 因为斜率误差是稳定误差,因此可以采取上述的公式将其从直线度测量结果中分离出来,亦可以采用两端法拟合或者最小二乘法拟合将其分离出去。 两端法拟合:即是将所有采集来的数据第一点和最后一点相连决定一直线,再将所有采集来的数据去除掉拟合的直线信息,由此得出的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910170000002.png[/img][/align]最小二乘法拟合:将采集回来的所有数据通过最小化误差的平方和方式来寻找数据的最佳函数匹配,而后将采集值与匹配函数对应值相比较,剩余的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910171562522.png[/img][/align]附:SJ6000激光干涉仪直线度测量精度。[table][tr][td][align=center]轴向量程[/align][/td][td][align=center]测量范围[/align][/td][td][align=center]测量精度[/align][/td][td][align=center]分辨力[/align][/td][/tr][tr][td][align=center]短距离[/align][/td][td][align=center](0.1~4.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(0.5+0.25%R+0.15M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.01μm[/align][/td][/tr][tr][td][align=center]长距离[/align][/td][td][align=center](1.0~20.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(5.0+2.5%R+0.015M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.1μm[/align][/td][/tr][tr][td=5,1]注:R为显示值,单位:μm;M为测量距离,单位:m[/td][/tr][/table]
1, 题目: 工程测量中光波干涉必须满足的几个条件2, 作者: 朱林彦3,期号: 《大学物理实验》 2010年03期4, 链接: http://www.cnki.com.cn/Article/CJFDTotal-DWSL201003008.htm









 我要推广仪器
我要推广仪器
 下载APP
下载APP



