推荐厂家
暂无
暂无

 留言咨询
留言咨询
 留言咨询
留言咨询
 400-860-5168转6027
留言咨询
400-860-5168转6027
留言咨询



我们公司很久之前买了一台WGW光电雾度仪,现在光源已坏,恳请那位朋友告诉这种型号的雾度仪光源规格及型号??谢谢!!

激光干涉仪具有测量精度高、测量范围大、测量速度快、最高测速下分辨率高等优点,结合不同的光学镜组,可实现线性测长、角度、直线度、垂直度、平行度、平面度等几何参量的高精度测量。在SJ6000激光干涉仪动态测量软件配合下,可实现线性位移、角度和直线度的动态测量与性能检测,以及进行位移、速度、加速度、振幅与频率的动态分析,如振动分析、丝杆导轨的动态特性分析、驱动系统的响应特性分析等。[align=center][img=,578,450]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201754505855_5264_3712_3.jpg!w578x450.jpg[/img][/align] 激光干涉仪最典型的应用就是测量机床精度,本文讲解如何使用激光干涉仪测量五轴机床平移轴直线度误差。 对于平移轴而言,每根轴均有两个直线度误差,因此三根轴有六个直线度误差,均可采用激光干涉仪分别测得。 原理:带有圆孔的是直线度干涉镜,其与待测轴相连一同运动;长条镜是直线度反射镜静止安装,其是对称结构,上下左右均对称。当一束激光从源头发出射入干涉镜,干涉镜将光束分成两束,形成一个很小的角度分别去往反射镜,由于反射镜上下对称,因此两束光被反射后又回到干涉镜,汇合成一股光束,去往激光头的探测器。当运动轴产生直线度误差时,会使得干涉镜相对于反射镜在水平横向方向发生相对运动,而反射镜是左右对称的(左右的镜片不在同一平面,有一定的角度),因此会使得两束分开的光束光程具有差别,根据此差别,即可测得运动轴产生的直线度误差。[align=center][img=,678,333]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755021895_7221_3712_3.jpg!w678x333.jpg[/img][/align][align=center]▲ 直线度测量的光路原理构建图[/align][align=center][img=,678,367]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755111914_6482_3712_3.jpg!w678x367.jpg[/img][/align][align=center]▲ 运动轴的横向直线度测量示意图[/align][align=center][img=,678,367]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755345695_9383_3712_3.jpg!w678x367.jpg[/img][/align][align=center]▲ 运动轴的纵向直线度测量示意图[/align] 根据直线度误差测量原理可知,测量过程中不可避免的会引入斜率误差。该误差是由于测量直线度反射镜的光学轴线最初与待测轴不平行,为调整平行而引起的。如图 所示,A 为干涉镜和反射镜的距离,B 为激光头到干涉镜的距离(其中干涉镜是固定在运动轴上的)。在一开始,反射镜的光学轴线处于旋转前的位置,而由于机床运动轴与其之间存在的夹角θ,[img]http://www.chotest.com/Upload/2019/10/201910173125514.jpg[/img][align=center][img]http://www.chotest.com/Upload/2019/10/201910177031118.png[/img][/align] 因为斜率误差是稳定误差,因此可以采取上述的公式将其从直线度测量结果中分离出来,亦可以采用两端法拟合或者最小二乘法拟合将其分离出去。 两端法拟合:即是将所有采集来的数据第一点和最后一点相连决定一直线,再将所有采集来的数据去除掉拟合的直线信息,由此得出的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910170000002.png[/img][/align]最小二乘法拟合:将采集回来的所有数据通过最小化误差的平方和方式来寻找数据的最佳函数匹配,而后将采集值与匹配函数对应值相比较,剩余的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910171562522.png[/img][/align]附:SJ6000激光干涉仪直线度测量精度。[table][tr][td][align=center]轴向量程[/align][/td][td][align=center]测量范围[/align][/td][td][align=center]测量精度[/align][/td][td][align=center]分辨力[/align][/td][/tr][tr][td][align=center]短距离[/align][/td][td][align=center](0.1~4.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(0.5+0.25%R+0.15M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.01μm[/align][/td][/tr][tr][td][align=center]长距离[/align][/td][td][align=center](1.0~20.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(5.0+2.5%R+0.015M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.1μm[/align][/td][/tr][tr][td=5,1]注:R为显示值,单位:μm;M为测量距离,单位:m[/td][/tr][/table]
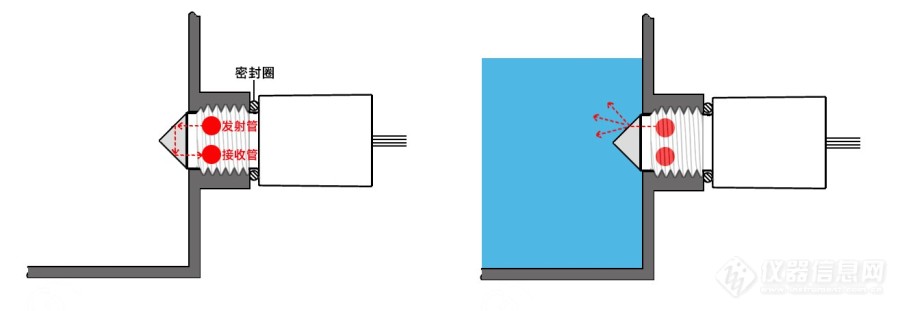
[font=宋体][color=#333333][back=white]光电液位探头由发光器和接收器组成。发光器会发射一束光线,而接收器会接收到这束光线。当液体的液位低于探头位置时,光线会被液体阻挡,导致接收器接收到的光线强度减弱。而当液体的液位高于探头位置时,光线能够顺利通过,接收器接收到的光线强度不会减弱。[/back][/color][/font][font=宋体][color=#333333][back=white]基于这个原理,光电液位探头可以通过检测光线的强度来确定液体的液位高低。当液位低于探头位置时,光线强度减弱,探头会输出一个低电平信号;当液位高于探头位置时,光线强度不变,探头会输出一个高电平信号。[/back][/color][/font][font=宋体][color=#333333][back=white]光电液位探头具有高精度、高灵敏度和快速响应的特点。它可以准确地检测液体的液位,广泛应用于各种液位检测场景,如水箱、油罐、化工容器等。[/back][/color][/font][align=center][img=光电液位传感器,690,238]https://ng1.17img.cn/bbsfiles/images/2023/07/202307241626070514_2528_4008598_3.jpg!w690x238.jpg[/img][/align][font=宋体][color=#333333][back=white]此外,[url=https://www.eptsz.com]光电液位传感器[/url]还具有耐高温、耐腐蚀和长寿命的特点,适用于各种不同类型的液体。它的安装和使用也相对简单,只需将探头固定在需要检测液位的位置,然后连接到相应的控制系统即可。[/back][/color][/font][font=宋体][color=#333333][back=white]总之,光电液位探头通过光电原理实现液位的测量,具有高精度、高灵敏度和快速响应的特点。它在液位检测领域发挥着重要的作用,为各种液体容器的安全运行提供了可靠的保障。[/back][/color][/font]












 我要推广仪器
我要推广仪器
 下载APP
下载APP


