推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询




离心平衡机是在转子旋转的状态下,根据转子不平衡引起的支承振动,或作用于支承的振动力来测量不平衡。其按校正平面数量的不同,可分为单面平衡机和双面平衡机。单面平衡机只能测量一个平面上的不平衡(静不平衡),它虽然是在转子旋转时进行测量,但仍属于静平衡机。双面平衡机能测量动不平衡,也能分别测量静不平衡和偶不平衡,一般称为动平衡机。离心平衡机按支承特性不同,又可分为软支承平衡机和硬支承平衡机。平衡转速高于转子一支承系统固有频率的称为软支承平衡机。这种平衡机的支承刚度小,传感器检测出的信号与支承的振动位移成正比。平衡转速低於转子一支承系统固有频率的称为硬支承平衡机,这种平衡机的支承刚度大,传感器检测出的信号与支承的振动力成正比。离心平衡机拖动转子的传动方式有圈带拖动,联轴节拖动和自驱动。 1,圈带拖动----是利用橡胶环形带或丝织环形带,由电机皮带轮拖动转子,因此圈带拖动要求转子表面必须有光滑的圆柱表面,圈带拖动的优点是不影响转子的不平衡量,平衡精度高。 2.联轴节拖动----是利用万向节将平衡机主轴与转子相联接。联轴节拖动的特点是 适合外表不规则的转子,可以传递较大的扭矩,适合拖动风机等风阻较大的转子,联轴节拖动的缺点是联轴节本身的不平衡量会对转子产生影响(因此联轴节在使 用前要对其进行平衡),也会引进干扰影响平衡的精度,此外还要做大量的连接 盘以适应不同型号的转子。 3,自驱动----是利用转子自身的动力旋转。自驱动是对平衡精度影响最小的拖动方式,平衡精度可达最高,但只有结构允许的特殊转子才能使用这种拖动方式。离心平衡机的特点:1.具有Windows平台下人机对话操作模式2.转子参数任意设置并保存3.可按任意等分分解,自动确定各铣削分量4.测量、搬送、修正、复检均全自动进行5.转子不需画标志,直接人工置入6.多重位置监控,及光幕安全保护7.伺服电机控制、配工业吸尘器
5.1 滴定分析中化学平衡5.2 平衡浓度及分布分数5.3 酸碱溶液的H+浓度计算5.4 对数图解法5.5 缓冲溶液5.6 酸碱指示剂5.7 酸碱滴定原理5.8 终点误差5.9 酸碱滴定法的应用5.10 非水溶液酸碱滴定简介[color=#DC143C]本文PPT文件:传上以供大家下载[img]http://www.instrument.com.cn/bbs/images/affix.gif[/img][url=http://www.instrument.com.cn/bbs/download.asp?ID=188154]05.rar[/url][/color]
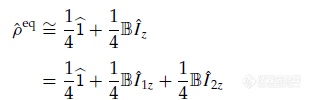
为了进一步讨论在脉冲作用及自由演化下AX系统的变化方程,我们首先需要知晓初始时刻AX系统的热平衡方程。已知热平衡下密度矩阵的所有相干项为0,只有ρ αα,ρ αβ,ρ βα,ρ ββ四个对角项。以|αα﹥态为例http://ng1.17img.cn/bbsfiles/images/2012/09/201209081224_389452_2071539_3.jpg同样地,依据前面“tcxuefeng读书笔记——自旋系综的热平衡密度算符及脉冲演化”相同的讨论过程,我们得到如下近似http://ng1.17img.cn/bbsfiles/images/2012/09/201209081226_389453_2071539_3.jpg对|αβ﹥,|βα﹥,|ββ﹥做同样操作从而得到http://ng1.17img.cn/bbsfiles/images/2012/09/201209081226_389454_2071539_3.jpg至此我们得出http://ng1.17img.cn/bbsfiles/images/2012/09/201209081227_389455_2071539_3.jpg其中http://ng1.17img.cn/bbsfiles/images/2012/09/201209081227_389456_2071539_3.jpg但是上式内的值与- γBo相比可以忽略不计,因此最终热平衡状态下的ρ αα简化为http://ng1.17img.cn/bbsfiles/images/2012/09/201209081228_389457_2071539_3.jpg其中http://ng1.17img.cn/bbsfiles/images/2012/09/201209081228_389458_2071539_3.jpg重复上述操作,我们最终得到http://ng1.17img.cn/bbsfiles/images/2012/09/201209081229_389459_2071539_3.jpg这一populations分布在能级图上表示如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209081229_389460_2071539_3.jpg其中|αα﹥态由于能量最低(两个核均与磁场方向同向)因此数量最多,而|ββ﹥态最少。最终我们可以将热平衡状态下的密度矩阵表示如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209081229_389461_2071539_3.jpg即http://ng1.17img.cn/bbsfiles/images/2012/09/201209081230_389462_2071539_3.jpg








 我要推广仪器
我要推广仪器
 下载APP
下载APP


