推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-877-2799
留言咨询
400-877-2799
留言咨询
 留言咨询
留言咨询




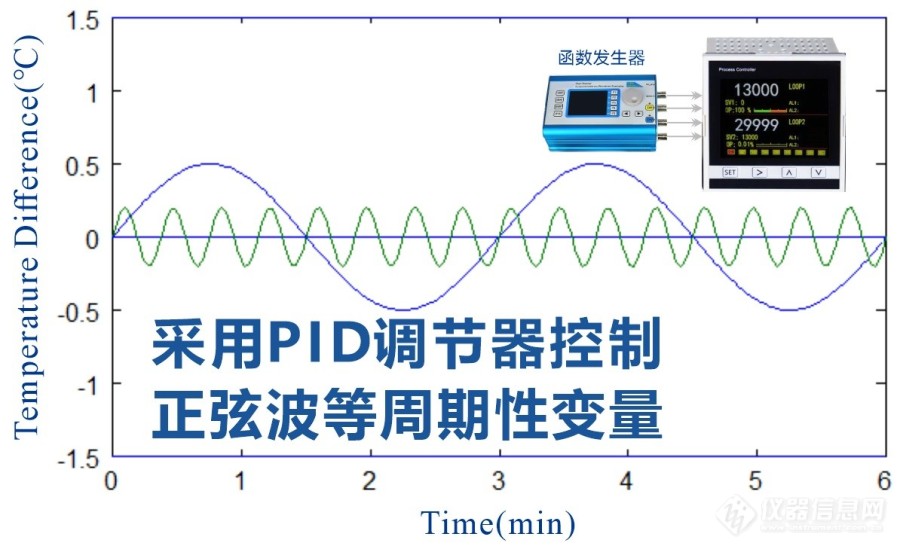
[size=16px][color=#339999]摘要:目前各种PID控制器仪表常用于简单的设定点(Set Point)和斜坡(Ramp)程序控制,但对于复杂的正弦波等周期性变量的控制则无能为力。为了采用标准PID控制器便捷和低成本的实现对正弦波等周期性变量的自动控制,本文介绍相应的解决方案。解决方案的主要内容一是采用具有远程设定点功能的PID控制器,二是采用外置信号发生器,发生器输出的周期信号作为PID控制器周期性改变的设定值,从而实现周期性变量的自动控制。[/color][/size][align=center][size=16px][img=正弦波等周期性变量PID自动控制的解决方案,600,365]https://ng1.17img.cn/bbsfiles/images/2023/03/202303031128526531_6859_3221506_3.jpg!w690x420.jpg[/img][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 在各种科研生产中经常会设计一些周期性的温度、湿度、真空压力和振动等交变环境或边界条件来进行各种特定的测试和考核,这些周期性边界条件或环境所呈现出的常见形式往往会是方波、正弦波,三角波和梯形波等,这在各种物理参数的动态测试和产品构件的性能考核试验过程中体现的尤为明显,由此就要求相应的自动化系统能提供这些不同波形环境变量的准确控制,从而保证实际环境的变化与测试及试验数学模型对边界条件的描述尽可能的吻合,最终保证物理变量测试以及考核试验的准确性和可靠性。[/size][size=16px] 在各种温度、湿度、真空压力和振动等环境的形成和自动化控制过程中,基本都是采用各种小巧的工业级PID控制器和PLC可编程逻辑控制器,这些控制器非常适用于定点或变化速度较慢的线性变化控制,图1(a)所示就是这样一个非常典型温度控制变化过程曲线。[/size][align=center][size=16px][color=#339999][b][img=典型被控变量变化曲线,690,213]https://ng1.17img.cn/bbsfiles/images/2023/03/202303031129551376_5834_3221506_3.jpg!w690x213.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 温度过程典型变化曲线:(a)折线形式;(b)正弦波形式[/b][/color][/size][/align][size=16px] 对于图1(a)所示的典型温度变化过程,采用普通的PID程序控制器进行编程设计就可以实现,并且还可以编辑多条这样的多折线控制程序进行存储和调用运行。但对于如图1(b)所示的正弦波形式的温度控制和线性升温加正弦波调制的温度控制,目前还未看到可进行这种周期性变量控制的标准化PID控制器。为了在实际应用中实现这种周期性变量的PID控制,往往需要采用计算机和PLC并进行复杂的控制程序编写才能实现这种复杂功能,但这具有较高的技术门槛。[/size][size=16px] 为了解决上述PID控制器对于复杂正弦波等周期性变量控制的无能为力,并能采用标准PID控制器便捷和低成本的实现对正弦波等周期性变量的自动控制,本文将提出以下解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] PID调节器进行自动控制的基本原理是根据设定值与被控对象测量值之间的控制偏差,将偏差按比例、积分和微分通过线性组合形成控制输出量,对被控对象进行控制。这里的设定值是一种泛指,实际上包括了不随时间变化的固定设定值和随时间变化的设定曲线。[/size][size=16px] 由此可见,对于PID控制器要实现自动控制的必要前提是要已知被控对象的变化要求,并将此要求按照设定值曲线输入给PID控制器。通常的设定曲线如图1(a)所示,它可以通过设定不同的爬升速率构成控制程序曲线。如果采用此方式来进行如图1(b)所示正弦波那样的周期性被控对象,则需要设计很多个小折线才能准确代表波形曲线,而在实际应用中还需能不断调整被动对象的波幅和频率,由此可见采用这种折线方式来对正弦波类周期性变化被动对象进行设定值近似无可操作性。总之,这种问题最终可以归结到如何使得PID控制器的设定值变得符合周期性函数特征,并可以很方便的进行波形、波幅和频率的更改。[/size][size=16px] 为了可以很方便的将PID控制器设定值按照所需的函数波形进行设置,本文提出的解决方案具体内容如下:[/size][size=16px] (1)采用具有外部设定点功能的PID控制器,即PID控制器所接收到的外部任意波形信号都可以作为设定值。[/size][size=16px] (2)外置一个函数信号发生器,给PID控制器传输所需的波形信号。[/size][size=16px] 依据上述方案所确定的PID控制装置及其接线如图2所示。[/size][align=center][size=16px][color=#339999][b][img=正弦波等周期变量PID控制装置及接线图,690,193]https://ng1.17img.cn/bbsfiles/images/2023/03/202303031146347077_9300_3221506_3.jpg!w690x193.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 正弦波等周期变量PID控制装置及接线图[/b][/color][/size][/align][size=16px][color=#339999][b]2.1 具有远程设定点功能的PID控制器[/b][/color][/size][size=16px] 所用的具有远程设定值功能的PID控制器一般配置有两个输入通道,第一主输入通道作为测量被控对象的传感器输入,第二辅助输入通道用来作为远程设定点输入。与主输入信号一样,辅助输入的远程设定点同样可接受47种类型的输入信号,其中包括10种热电偶温度传感器、9种电阻型温度传感器、3种纯电阻、10种热敏电阻、3种模拟电流和12种模拟电压,即任何信号源只要能转换为上述47种类型型号,都可以直接接入第二辅助输入通道作为远程设定点源。需要注意的是,远程设定点功能只能在单点设定控制模式下有效,在程序控制模式下无此功能。[/size][size=16px][color=#339999][b]2.2 函数信号发生器[/b][/color][/size][size=16px] 对于所有被控对象而言,相应的传感器测量输出无外乎就是电压和电阻这两类信号输出。因此,为了实现被控对象周期性变化的控制,可以采用各种相应的函数信号发生器输出周期性设定值,对于热电偶和热电阻的周期信号输出,可以采用专门的过程校验仪输出相应的温度设定值。[/size][size=16px][color=#339999][b]2.3 接线、参数设置和操作[/b][/color][/size][size=16px] 在如图2所示的周期性变量PID控制系统中,在主输入通道上连接过程传感器,在主控输出通道连接的是执行机构,由此传感器、执行机构和PID调节器组成标准的闭环控制回路,在一般情况下可以通过内部设定点进行PID自动控制。[/size][size=16px] 如果要对被控对象进行周期性变化的控制,则使用远程设定点功能,此时需要在辅助输入通道接入远程设定点源,即函数信号发生器或过程校验仪。[/size][size=16px] 完成外部接线后,在运行使用远程设定值功能之前,需要对PID控制器的辅助输入通道相关参数进行设置,需要满足以下几方面要求:[/size][size=16px] (1) 辅助通道上接入的远程设定点信号类型要与主输入通道完全一致。[/size][size=16px] (2) 辅助通道的显示上下限也要与主输入通道完全一致。[/size][size=16px] (3) 显示辅助通道接入的远程设定点信号大小的小数点位数要与主输入通道保持一致。[/size][size=16px] 完成上述辅助输入通道参数的设置后,开始使用远程设定点功能时,还需要激活远程设定值功能。远程设定值功能的激活可以采用以下两种方式:[/size][size=16px] (1) 内部参数激活方式:在PID控制器中,设置辅助输入通道2的功能为“远程SV”,相应数字为3。[/size][size=16px] (2)外部开关切换激活:如图2所示可连接一个外部开关进行切换来选择远程设定点功能。同时,还需在PID控制器中,设置辅助输入通道2的功能为 “禁止”,相应数字为0。然后设置外部开关量输入功能DI1为“遥控设定”,相应数字为2。通过这种外部开关量输入功能的设置,就可以采用图2中所示的纽子开关实现远程设定点和本地设定点之间的切换,开关闭合时为远程设定点功能,开关断开时为本地设定点功能。[/size][size=16px] 需要注意的是,无论采用哪种远程设定点激活和切换方式,在输入信号类型、显示上下限范围和小数点位数这三个参数选项上,辅助输入通道始终要与主输入通道保持一致。[/size][size=16px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,本文提出的解决方案,可以彻底解决正弦波等周期性变量的PID控制问题,而且使用简便和门槛较低,无需再进行复杂的程序编写。[/size][size=16px] 另外,本解决方案还可以进行多种拓展,如可实现被控对象周期性调制波的加载,非常便于实现更复杂的第二类和第三类边界条件的精密PID控制。[/size][size=16px][/size][align=center]~~~~~~~~~~~~~~~~~~~~[/align][size=16px][/size]

[color=#990000]摘要:目前真空冷冻干燥过程中已普遍使用了电容压力计,使得与电容压力计相配套的压力控制器和电动进气调节阀这两个影响压力控制精度和重复性的主要环节显着尤为突出。为解决控制精度问题,本文介绍了国产最新型的2通道24位高精度PID压力控制器和步进电机驱动电动针阀的功能、技术指标及其应用。经试验验证,上游控制模式中使用电动针阀和高精度控制器可将压力精确控制在±1%以内,并且此控制器还可以同时用于冷冻干燥过程中皮拉尼真空计的监控,以进行初次冻干终点的自动判断。[/color][size=18px][color=#990000]一、问题的提出[/color][/size] 压力控制是真空冻干过程中的一个重要工艺过程,其控制精度严重影响产品质量,对于一些敏感产品的冷冻干燥尤为重要。因此,为使冷冻干燥过程可靠且可重复地进行,必须在干燥室内准确、重复地测量和控制压力,这是考察冷冻干燥硬件设备能力的重要指标之一。同时因为一次干燥时的压力或真空度,直接影响产品升华界面温度,因此准确平稳的控制压力,对于一次干燥过程至关重要。但在实际真空冷冻干燥过程中,在准确压力控制方面目前国内还存在以下问题: (1)压力控制器不匹配问题:尽管冷冻干燥工艺和设备都配备了精度较高的电容压力计,其精度可达到满量程的0.2%~0.5%,但目前国内大多配套采用PLC进行电容压力计直流电压信号的测量和控制,PLC的A/D和D/A转换精度明显不够,严重影响压力测量和控制精度。A/D和D/A转换精度至少要达到16位才能满足冷冻干燥过程的需要。 (2)进气控制阀不匹配问题:对于冷冻干燥中的真空压力控制,其压力恒定基本都在几帕量级,因此一般都采用上游进气控制模式,即在真空泵抽速一定的情况下,通过电动调节阀增加进气流量以降低压力,减少进气流量以增加压力。但目前国内普遍还在使用磁滞很大的电磁阀来进行调节,严重影响压力控制精度和重复性,而目前国际上很多已经开始使用步进电机驱动的低磁滞电动调节阀。 为解决上述冷冻干燥过程中压力控制存在的问题,本文将介绍国产最新型的2通道24位高精度PID压力控制器、电动针阀的功能、技术指标及其应用。经试验考核和具体应用的验证,上游控制模式中使用电动针阀和高精度PID压力控制器可将压力精确控制在±1%以内,并且2通道PID控制器还可以同时用于冷冻干燥过程中皮拉尼真空计的监控和记录。[size=18px][color=#990000]二、国产2通道24位高精度PID压力控制器[/color][/size] 为充分利用电容压力计的测量精度,控制器的数据采集和控制至少需要16位以上的模数和数模转化器。目前我们已经开发出VPC-2021系列高精度24位通用性PID控制器,如图1所示。此系列PID控制器功能强大远超国外产品,但价格只有国外产品的八分之一。[align=center][img=冷冻干燥压力控制,550,286]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211608584555_3735_3384_3.png!w650x338.jpg[/img][/align][align=center][color=#990000]图1 国产VPC-2021系列温度/压力控制器[/color][/align] 压力控制器其主要性能指标如下: (1)精度:24位A/D,16位D/A。 (2)多通道:独立1通道或2通道。2通道可实现双传感器同时测量及控制。 (3)多种输出参数:47种(热电偶、热电阻、直流电压)输入信号,可实现不同参量的同时测试、显示和控制。 (4)多功能:正向、反向、正反双向控制。 (5)PID程序控制:改进型PID算法,支持PV微分和微分先行控制。可存储20组分组PID,支持20条程序曲线(每条50段)。 (6)通讯:两线制RS485,标准MODBUSRTU 通讯协议。 在冷冻干燥的初级冻干终点判断中,VPC-2021系列中的2通道控制器可同时接入电容压力计和皮拉尼压力计,其中电容压力计用作真空压力控制,皮拉尼计用来监视冻干过程中水汽的变化,当两个真空计的差值消失时则认为初级冻干过程结束。整个过程的典型变化曲线如图2所示。[align=center][color=#990000][img=冷冻干燥压力控制,586,392]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211609304857_1459_3384_3.png!w586x392.jpg[/img][/color][/align][align=center][color=#990000]图2. 初级干燥过程中的典型电容压力计和皮拉尼压力计的测量曲线[/color][/align][size=18px][color=#990000]三、国产步进电机驱动电子针阀[/color][/size] 为实现进气阀的高精度调节,我们在针阀基础上采用数控步进电机开发了一系列不同流量的电子针阀,其磁滞远小于电磁阀,如图3所示,价格只有国外产品的三分之一,详细技术指标如图4所示。[align=center][img=冷冻干燥压力控制,400,342]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211609435684_1917_3384_3.png!w599x513.jpg[/img][/align][align=center][color=#990000]图3 国产NCNV系列电子针阀[/color][/align][align=center][color=#990000][img=冷冻干燥压力控制,690,452]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610002292_1250_3384_3.png!w690x452.jpg[/img][/color][/align][align=center][color=#990000]图4 国产NCNV系列电子针阀技术指标[/color][/align][size=18px][color=#990000]四、国产PID控制器和电子针阀考核试验[/color][/size] 考核试验采用了1Torr量程的电容压力计,电子针阀作为进气阀以上游模式进行控制试验。首先开启真空泵后使其全速抽气,然后在68Pa左右对PID控制器进行 PID参数自整定。自整定完成后,分别对12、27、40、53、67、80、93和 107Pa 共 8 个设定点进行了控制,整个控制过程中真空度的变化如图 5所示。 [align=center][color=#990000][img=冷冻干燥压力控制,690,418]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610175473_9598_3384_3.png!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图5 多点压力控制考核试验曲线[/color][/align] 将图5曲线的控制效果以波动率来表达,则得到如图6所示的不同真空压力下的波动率。从图6可以看出,整个压力范围内只有在12Pa控制时波动率大于1%,显然将68Pa下自整定得到的PID参数应用于12Pa压力控制并不太合适,还需要进行单独的PID 参数自整定。[align=center][color=#990000][img=冷冻干燥压力控制,690,388]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610294377_3818_3384_3.png!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图6. 多点压力恒定控制波动率[/color][/align][align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
由于噪声与振动污染的物理特征最为直观易感,且与民众的日常工作生活息息相关,近年来,噪声污染投诉事件的数量几乎在所有城市一直高居各类环境污染诉讼事件的首位。噪声污染、空气污染和水污染一起被列为三大污染。当空气污染和水污染得到控制后,噪声污染被列为21世纪环境污染控制的主要问题。近年来,我国城市噪声污染日趋严重,多数城市处于噪声污染的中等水平,许多城市生活区噪声已高于60dB,成为我国现代城市的一大公害。据一些热点城市统计,目前噪声污染投诉事件约占到环境污染投诉总量的60%-70%,直接影响了社会的安定、和谐发展,其污染评估和治理工程也再次成为我国环保产业发展的热点。根据前瞻产业研究院发布的《中国噪声与振动控制行业发展前景与投资预测分析报告》资料显示,据中国环境保护产业协会噪声与振动控制委员会统计,2012年全国从事噪声与振动控制相关产业和工程技术服务的专业企业总数约900家,从业总人数维持在约3万人。噪声与振动污染防治行业总产值达到160亿元。前瞻网噪声与振动控制行业分析认为,随着各级政府、各大部委对于环境保护工作的日益重视和环境噪声控制技术政策的深入执行,全国环境噪声与振动控制行业的发展环境将得到进一步的改善,行业将大有可为。










 我要推广仪器
我要推广仪器
 下载APP
下载APP


