视频号

抖音号

哔哩哔哩号

前沿资讯手机看



分享到微信朋友圈
打开微信,点击底部的“发现”,
使用“扫一扫”即可将网页分享到朋友圈。
超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家展开研究,探索这一特性在相关领域的应用前景,例如细胞操作、净化水源等。然而,目前大部分对于超疏水微型机器人的研究均是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到限制。
针对这一问题,中国科学院沈阳自动化研究所微纳米课题组科研团队开展了创新性研究,利用模板辅助法研发出多刺激响应超疏水微型机器人,其中超疏水的作用减少了水对微型机器人的阻碍。该微型机器人内部具有感知红外光和磁场的单元,可以储存化学试剂,使其可在光场、磁场等(即多场驱动)的控制下在水面快速游动。基于微型机器人的多刺激响应特性,在多场联合控制下,微型机器人实现了协同配合操作。相关研究成果以Multistimuli-Responsive Hydroplaning Superhydrophobic Microrobots with Programmable Motion and Multifunctional Applications为题,发表在ACS Nano上。
该研究对微型机器人的稳定性和环境适应性进行评估。结果表明,机器人在水面上可以实现预编程的轨迹运动,尤其是在化学试剂的作用和磁场的驱动下实现了不同轨迹的运动。科研人员进一步探索了在多场驱动下实现多个机器人运动控制的可能性。研究表明,在光场和磁场作用下,多个机器人实现了协同配合操作,可以夹取大于自身尺寸较多的结构块。随着制备工艺的提升,微型机器人的尺寸有望进一步缩小,在细胞操作、生物组织构建等领域颇具应用前景。
微纳米机器人课题组始终致力于小尺寸机器人研究,针对毫米级、微米级、纳米级机器人开展了系列研究,在磁驱动毫米机器人、光驱动毫米机器人、热驱动毫米机器人、气泡微米机器人、细胞微米机器人、混合驱动纳米机器人等方面取得了系列成果。
研究工作得到中科院“青年团队计划”、国家自然科学基金、机器人学国家重点实验室等的支持。

多刺激响应超疏水微型机器人驱动与控制
[来源:沈阳自动化研究所]
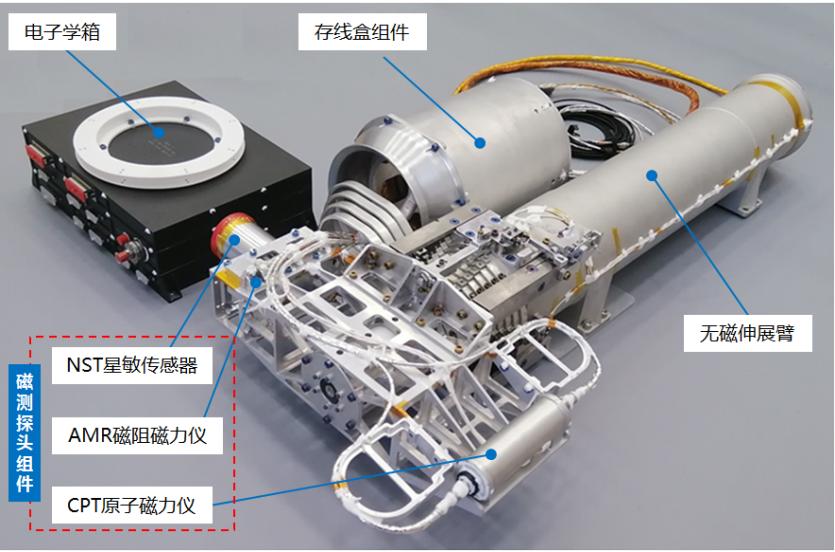
沈阳自动化所空间无磁伸展臂助力国产量子磁力仪实现全球磁场测量
2022.11.15
是东方之珠 也是科研高地:香港浸大借助安捷伦技术,稳居交叉学科研究C位
2024.07.05

1200万!甘肃农业大学干旱生境作物学国家重点实验室超高分辨质谱仪采购项目
2024.06.05

2024.04.30

2024.03.29

892万!湖北大学省部共建生物催化与酶工程国家重点实验室建设货物采购项目
2024.03.20
品牌合作伙伴






























版权与免责声明:
① 凡本网注明"来源:仪器信息网"的所有作品,版权均属于仪器信息网,未经本网授权不得转载、摘编或利用其它方式使用。已获本网授权的作品,应在授权范围内使用,并注明"来源:仪器信息网"。违者本网将追究相关法律责任。
② 本网凡注明"来源:xxx(非本网)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。如其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
③ 如涉及作品内容、版权等问题,请在作品发表之日起两周内与本网联系,否则视为默认仪器信息网有权转载。
![]() 谢谢您的赞赏,您的鼓励是我前进的动力~
谢谢您的赞赏,您的鼓励是我前进的动力~
打赏失败了~
评论成功+4积分
评论成功,积分获取达到限制
![]() 投票成功~
投票成功~
投票失败了~