
视频号

抖音号

哔哩哔哩号

前沿资讯手机看



分享到微信朋友圈
打开微信,点击底部的“发现”,
使用“扫一扫”即可将网页分享到朋友圈。
磁活性流体或铁流体在外部磁场作用下可以改变其形状和粘度。它可以在较高浓度的磁性粒子中获得高的磁驱动力。由于其独特的性能,铁流体在众多领域有较为广泛的应用。当铁流体的载体液体和环境液体不相容时,前者因其高度的自聚性并不会在小体积中迅速分散。这一特性可以有效地防止磁性纳米粒子扩散过快。同时,基于其流体特性,铁流体具有较高的可变形性,并能通过狭窄的通道和障碍物。此外,铁流体在磁场中也具有高输出力。然而控制铁流体机器人在三维空间的运动,并使用机器人进行药物输送仍有待研究。
近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授等研发了一种四线圈梯度磁场控制系统,该系统可以实现磁流体微型机器人在三维空间中的运动控制。同时,使用面投影微立体光刻3D打印技术(nanoArch S140,摩方精密),研究团队依据在药物递送的实际应用环境中可能出现的复杂环境进行设计并打印相关模型,并对磁流体微型机器人在药物递送相关领域的性质和优势展开了进一步的研究。相关成果以“Deformable Ferrofluid Microrobot with Omnidirectional Self-adaptive Mobility”为题发表在《Journal of Applied Physics》期刊上。
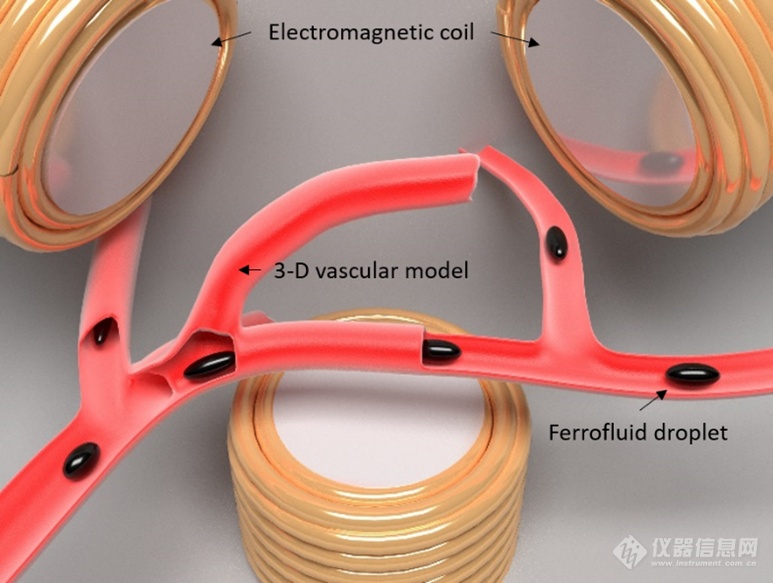
图一 由电磁线圈系统控制在血管模型中移动的铁流体机器人的概念图及系统图。
经过数值模拟和实际测量,该系统产生的磁场梯度可以达到4.14T/m,并可以实现对磁流体机器人的三维控制,最大的控制误差不超过0.3mm。最后,线圈系统控制铁流体液滴在最大内径为3毫米的三维血管模型中实现自主运动。控制效果的实现使得铁流体机器人在通过血管导航进行药物输送方面具有技术潜力。
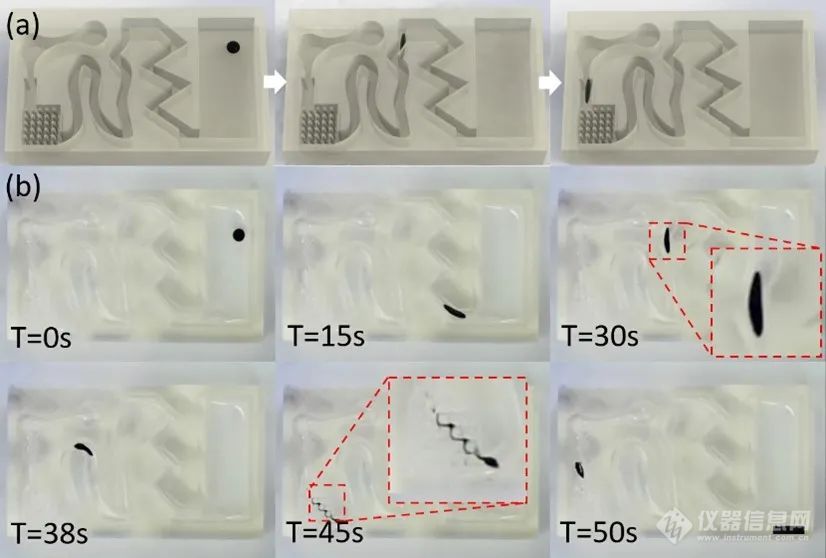
图二 (a) 磁流体机器人运动的示意图。(b)不同时刻的磁流体机器人的位置和状态。比例尺:5毫米。(复杂环境尺寸特征:长38mm宽22mm高5mm,其中折线和曲线通道直径为1.5mm,左下角圆柱阵列援助直径0.5mm,间距0.5mm。)
通过对磁流体机器人的变形能力的研究,发现机器人可以通过比其直径小四倍的缝隙(图二)。同时 ,基于有限元模拟,磁流体机器人的变形可以使流场中的阻力减少43.75%,这使得磁流体机器人在人体血管高流速环境中运动成为可能。此外,利用3D打印的血管模型,对磁控系统控制微型机器人在三维血环境中运动能力进行了验证(图三)。
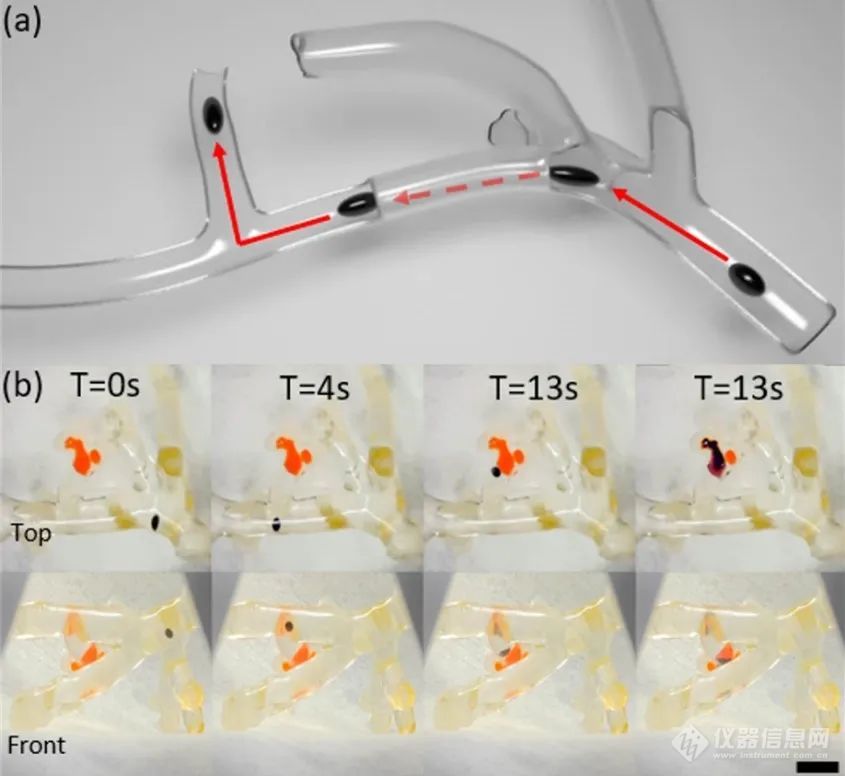
图三 (a) 血管模型中磁流体运动的控制示意图。(b)三维血管模型中不同时刻铁流体机器人的真实位置和状态。比例尺:5毫米。
该项研究成果获得国家重点研发计划(No. 2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持。
原文链接:https://doi.org/10.1063/5.0076653
作者: 纪易明
[来源:深圳摩方新材科技有限公司]
 2021年众瑞售后服务总结
2021年众瑞售后服务总结

2024.07.17
2024.07.03

当微纳制造碰撞艺术创造,摩方赞助的 “微缩版诺亚方舟登月”艺术展正在日本展出
2024.06.26
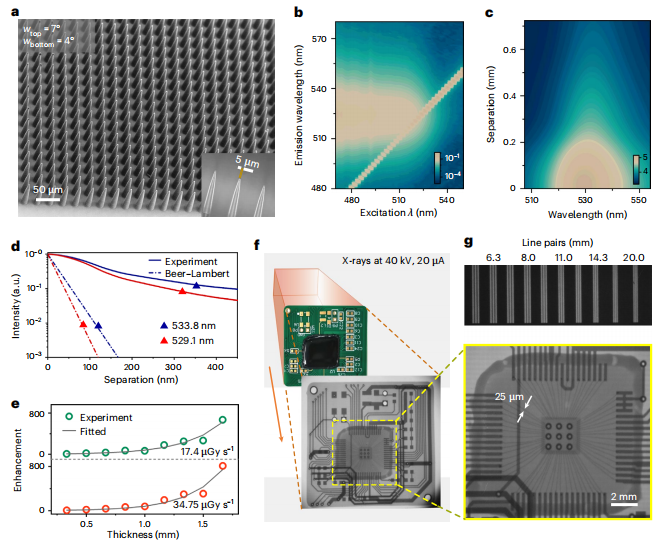
新加坡国立大学刘小钢团队:制备用于提高射线成像性能的像素化双锥形光纤阵列
2024.06.26
品牌合作伙伴






























版权与免责声明:
① 凡本网注明"来源:仪器信息网"的所有作品,版权均属于仪器信息网,未经本网授权不得转载、摘编或利用其它方式使用。已获本网授权的作品,应在授权范围内使用,并注明"来源:仪器信息网"。违者本网将追究相关法律责任。
② 本网凡注明"来源:xxx(非本网)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。如其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
③ 如涉及作品内容、版权等问题,请在作品发表之日起两周内与本网联系,否则视为默认仪器信息网有权转载。
![]() 谢谢您的赞赏,您的鼓励是我前进的动力~
谢谢您的赞赏,您的鼓励是我前进的动力~
打赏失败了~
评论成功+4积分
评论成功,积分获取达到限制
![]() 投票成功~
投票成功~
投票失败了~






