
[color=#333333]高光谱遥感具有光谱分辨率高、波段范围窄、图谱合一、连续成像等特点,能够区分出地物光谱的细微差别,探测到其他宽波段遥感无法探测的信息。因此,高光谱遥感在生态、大气、海洋、农业、林业、矿业等诸多应用领域具有非常大的优势。近年来随着成像光谱仪硬件技术不断发展,成像光谱仪的体积越来越小、重量越来越轻、成本越来越低,因而利用成像光谱仪获取高光谱影像更为方便、快捷。随着无人机技术的日益成熟,基于无人机平台的新型遥感技术异军突起,得到科研工作者的青睐,从而将成像光谱仪与无人机高度集成获取地物无人机成像高光谱影像成为新的研究热点。[/color][color=#333333] [/color][color=#333333]然而由于无人机航拍受飞行高度,相机本身参数的影响,单张无人机影像所覆盖的区域面积不大,需要对多张影像进行拼接,才能有效地覆盖研究区域。无人机载高光谱影像图幅较小,为每幅影像单独添加控制点信息工作量大、耗时长,而对影像统一添加控制点信息将大大缩短工作时间,提高工作效率。近年来,学者们对无人机影像数据的拼接做了很多研究,主要方法有基于姿态参数(POS数据)的拼接、基于非特征的拼接和基于特征的拼接等,其中无人机影像的拼接大部分是针对RGB图像或者多波段图像,而针对无人机高光谱影像的拼接方法较少,特别是对于无人机高光谱内置推扫获取的高光谱影像数据,目前还没有研究者对其拼接方法进行研究。[/color][color=#333333] [/color][color=#333333]鉴于目前对无人机高光谱影像数据拼接技术存在的不足之处,本文旨在研究一种低空无人机载高光谱影像自动拼接方法,其具有易于实现、拼接精度高、光谱畸变小等优点,可实现无地面控制点的无人机载高光谱影像的自动拼接,以解决当前单幅无人机载高光谱遥感影像图幅过小的问题。[/color][b][color=#333333]1 [/color][color=#333333]仪器设备与数据处理流程[/color][color=#333333]1.1 [/color][color=#333333]数据采集设备[/color][/b][color=#333333] [/color][color=#333333]本次试验地点在北京市大兴区南六环外黄村镇李村,无人机采用大疆无人机M600 Pro,在无人机平台上搭载的自主研发的高光谱成像仪GaiaSky-mini。无人机高光谱影像获取时间为2017年11月8日下午的12:00-14:00,天气为晴,无人机飞行高度为400米,采用的是2*4 binning方式获取高光谱影像(2是空间维的,4是光谱维),高光谱影像的空间分辨率约为20cm,此次飞行共获取24景高光谱影像数据,每景高光谱影像数据代表的地面幅宽约为190米*190米,面积约为36100平方米,其中每景高光谱影像数据之间的横向重叠率为50%,纵向重叠率为40%。[/color][b][color=#333333]1.2 [/color][color=#333333]数据的预处理与分析[/color][/b][color=#333333] [/color][color=#333333]无人机高光谱影像的预处理在SpecView软件中进行,包括镜像变换、黑白帧校准、大气校正。[/color][b][color=#333333]1.3 [/color][color=#333333]无人机高光谱影像拼接流程[/color][/b][color=#333333] [/color][color=#333333]对消除大气、水汽等因素影响的高光谱影像计算其波段信噪比,根据其信噪比的峰值筛选出特征波段,然后基于SIFT算法对选出的特征波段提取特征点并对特征点进行匹配,图像拼接过程中利用经纬度信息及墨卡托投影(Mercator)纠正图像的变形,同时利用重投影空三(Reproj)算法细化高光谱相机参数。在高光谱影像拼接之前选择是否对拼接图像进行匀色,最后得到拼接好的高光谱影像数据。[/color][b][color=#333333]1.4 [/color][color=#333333]高光谱影像拼接效果检验[/color][/b][color=#333333] [/color][color=#333333]为了准确地验证高光谱影像拼接结果的有效性,提取了拼接结果重叠区域和非拼接图像相同经纬度的8个采样点的光谱反射率,利用光谱角填图(SAM)、波谱特征拟合分类法(SFF)及二进制编码(BE)对拼接前后、是否匀色的光谱曲线进行匹配与相似性计算,得到一个0-1的匹配度分值,结果总分值越高,则相似性越好。[/color][b][color=#333333]2 [/color][color=#333333]高光谱影像拼接结果分析[/color][color=#333333]2.1 [/color][color=#333333]高光谱拼接图分析[/color][color=#333333] [/color][/b][color=#333333]以高光谱拼接图像的任意三波段作为RGB(R:red,G:green, B:blue)伪彩色合成图为例,从图1可知,从总体上看,对图像特征点明显的区域,是否选择匀色对高光谱影像的拼接无显著差异。但在特征点不显著区域则图像显示差异较大,如图2可知,对拼接图像是否采用匀色对高光谱影像的“图”有较为显著的差异,显然在采用匀色对拼接结果的“图”效果更好,而匀色是否对高光谱影像的“光谱”有较大的影响,则需要进一步的分析验证。[/color][align=center][color=#333333] [/color][img=,32,32]https://bbs.instrument.com.cn/xheditor/xheditor_skin/blank.gif[/img][img=,491,317]https://ng1.17img.cn/bbsfiles/images/2019/10/201910301711364656_1384_488_3.png!w491x317.jpg[/img][/align][align=center][color=#333333]图1 高光谱影像拼接前后效果图(以RGB伪彩色为例)[/color][/align][align=center][img=,404,223]https://ng1.17img.cn/bbsfiles/images/2019/10/201910301711509831_6894_488_3.png!w404x223.jpg[/img][/align][align=center][color=#333333]图2 高光谱影像重叠区域拼接匀色与否对比[/color][/align][b][color=#333333]2.2 [/color][color=#333333]高光谱影像拼接光谱分析[/color][/b][color=#333333] [/color][color=#333333]为了进一步验证高光谱影像拼接结果的有效性,本文提取了拼接结果重叠区域中典型地物(如植被、土壤、房屋等)的8个采样点的光谱反射率及拼接前2景图像对应位置的光谱反射率进行对比分析,这8个采样点的光谱反射率曲线如图3所示。图3中第一条光谱和第二条光谱代表的是拼接前2景图像重叠区相同位置的光谱反射率,未匀色和匀色分别代表的是未匀色和匀色拼接图像相应位置的光谱反射率。从图3可知,反射率较高的地物,其拼接前后的光谱重叠率较高,如第三类和第六类地物;而反射率较低的地物,其拼接前后的光谱差异较大,如第七类地物所示。总体而言拼接前后高光谱图像的光谱反射率曲线相似度非常高,拼接后其光谱反射率曲线保留了未拼接前高光谱图像的反射率曲线的大部分信息。[/color][align=center][img=,467,450]https://ng1.17img.cn/bbsfiles/images/2019/10/201910301712198573_4784_488_3.png!w467x450.jpg[/img][/align][align=center][img=,32,32]https://bbs.instrument.com.cn/xheditor/xheditor_skin/blank.gif[/img][img=,470,450]https://ng1.17img.cn/bbsfiles/images/2019/10/201910301712340082_5650_488_3.png!w470x450.jpg[/img][/align][align=center][color=#333333]图3 8个采样点拼接前光谱曲线与拼接后光谱曲线对比分析[/color][/align][b][color=#333333]2.3 [/color][color=#333333]高光谱影像拼接前后光谱匹配度分析[/color][/b][color=#333333] [/color][color=#333333]在高光谱影像的实际应用中不仅注重空间信息更加注重其光谱信息,因此为了更为准确地验证拼接方法的有效性,分别选用光谱角填图(SAM)、波谱特征拟合分类法(SFF)及二进制编码(BE)对拼接前后、是否匀色的光谱曲线进行匹配与相似性计算,得到一个0-1的匹配度分值, SAM、SFF和BE三者总分值越高,则相似性越好,具体计算结果如表1所示。[/color][color=#333333] [/color][color=#333333]从表1可以看出,在SAM方面,在8个采样点中,未匀色拼接结果图像的匹配度最小值为0.959,最大值为1,匀色拼接结果图像的匹配度最小值为0.958,最大值为0.995;在SFF方面,在8个采样点中,未匀色拼接结果图像的匹配度最小值为0.881,最大值为0.999,匀色拼接结果图像的匹配度最小值为0.807,最大值为0.995;在BE方面,在8个采样点中,未匀色拼接结果图像的匹配度最小值为0.942,最大值为1,匀色拼接结果图像的匹配度最小值为0.883,最大值为1;在SAM、SFF和BE三者总分值方面,在8个采样点中,未匀色拼接结果图像的匹配度最小值为2.826,最大值为2.999,匀色拼接结果图像的匹配度最小值为2.801,最大值为2.985,因此是否对高光谱图像的拼接结果采用匀色处理,对其光谱并无太大影响。[/color][color=#333333] [/color][color=#333333]不同采样点之间,当利用第一条光谱作为基准对其他光谱曲线进行匹配分析时,得出的匹配结果与利用第二条光谱作为基准对其他光谱曲线进行匹配分析时不一样,这是因为两景图像虽然有着重叠区域,但是受空间分辨率的影响,并不能保证存在重叠区的高光谱图像,其相应像素代表的地面物体完全相同,因此光谱曲线存在差异是正常的。为减少两景图像重叠区相同像素光谱的差异性,在选择采样点时尽量选择周边较为均一的地物。[/color][align=center][color=#333333]表1 影像拼接前后其光谱相似度评价[/color][/align] [table=327][tr][td=1,10] [align=center]采样点1[/align] [/td][td=1,2] [align=center][b] [/b][/align] [/td][td=4,1] [align=center]光谱匹配度鉴定结果[/align] [/td][/tr][tr][td]SAM[/td][td]SFF[/td][td]BE[/td][td]总分[/td][/tr][tr][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]0.965[/align] [/td][td] [align=center]0.883[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.848[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.959[/align] [/td][td] [align=center]0.901[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.859[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.958[/align] [/td][td] [align=center]0.897[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.856[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.965[/align] [/td][td] [align=center]0.889[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.854[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.971[/align] [/td][td] [align=center]0.881[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.853[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.973[/align] [/td][td] [align=center]0.872[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.845[/align] [/td][/tr][tr][td=1,8] 采样点2[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]0.987[/align] [/td][td] [align=center]0.951[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.933[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]0.955[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.938[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]0.949[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.927[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.996[/align] [/td][td] [align=center]0.993[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.989[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.987[/align] [/td][td] [align=center]0.930[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.911[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.970[/align] [/td][td] [align=center]0.880[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.845[/align] [/td][/tr][tr][td=1,8] 采样点3[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]0.999[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.999[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]0.999[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.999[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.995[/align] [/td][td] [align=center]0.995[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.985[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.995[/align] [/td][td] [align=center]0.990[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.985[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.995[/align] [/td][td] [align=center]0.990[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.985[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.995[/align] [/td][td] [align=center]0.990[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.985[/align] [/td][/tr][tr][td=1,8] 采样点4[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]0.999[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.999[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.978[/align] [/td][td] [align=center]0.881[/align] [/td][td] [align=center]0.989[/align] [/td][td] [align=center]2.848[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.968[/align] [/td][td] [align=center]0.882[/align] [/td][td] [align=center]0.972[/align] [/td][td] [align=center]2.821[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.968[/align] [/td][td] [align=center]0.886[/align] [/td][td] [align=center]0.972[/align] [/td][td] [align=center]2.826[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.968[/align] [/td][td] [align=center]0.886[/align] [/td][td] [align=center]0.972[/align] [/td][td] [align=center]2.826[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.981[/align] [/td][td] [align=center]0.837[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.801[/align] [/td][/tr][tr][td=1,8] 采样点5[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]0.996[/align] [/td][td] [align=center]0.972[/align] [/td][td] [align=center]2.968[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]0.991[/align] [/td][td] [align=center]0.942[/align] [/td][td] [align=center]2.927[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]0.981[/align] [/td][td] [align=center]0.883[/align] [/td][td] [align=center]2.859[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.991[/align] [/td][td] [align=center]0.931[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.922[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.985[/align] [/td][td] [align=center]0.903[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.882[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.981[/align] [/td][td] [align=center]0.890[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.866[/align] [/td][/tr][tr][td=1,8] 采样点6[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]0.991[/align] [/td][td] [align=center]0.970[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.961[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.991[/align] [/td][td] [align=center]0.970[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.960[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.978[/align] [/td][td] [align=center]0.927[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.905[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.991[/align] [/td][td] [align=center]0.971[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.961[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.987[/align] [/td][td] [align=center]0.956[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.944[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.982[/align] [/td][td] [align=center]0.942[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.923[/align] [/td][/tr][tr][td=1,8] 采样点7[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]0.979[/align] [/td][td] [align=center]0.940[/align] [/td][td] [align=center]0.977[/align] [/td][td] [align=center]2.896[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]0.981[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.970[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.990[/align] [/td][td] [align=center]0.969[/align] [/td][td] [align=center]0.994[/align] [/td][td] [align=center]2.954[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.979[/align] [/td][td] [align=center]0.936[/align] [/td][td] [align=center]0.977[/align] [/td][td] [align=center]2.892[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.989[/align] [/td][td] [align=center]0.968[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.940[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.985[/align] [/td][td] [align=center]0.955[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.923[/align] [/td][/tr][tr][td=1,8] 采样点8[/td][td=5,1] [align=center]第一条光谱[/align] [/td][/tr][tr][td] [align=center]第二条光谱[/align] [/td][td] [align=center]0.990[/align] [/td][td] [align=center]0.930[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.920[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.985[/align] [/td][td] [align=center]0.910[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.877[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.981[/align] [/td][td] [align=center]0.899[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.863[/align] [/td][/tr][tr][td=5,1] [align=center]第二条光谱[/align] [/td][/tr][tr][td] [align=center]第一条光谱[/align] [/td][td] [align=center]0.996[/align] [/td][td] [align=center]0.974[/align] [/td][td] [align=center]1[/align] [/td][td] [align=center]2.970[/align] [/td][/tr][tr][td] [align=center]未平滑[/align] [/td][td] [align=center]0.990[/align] [/td][td] [align=center]0.949[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.923[/align] [/td][/tr][tr][td] [align=center]平滑[/align] [/td][td] [align=center]0.981[/align] [/td][td] [align=center]0.889[/align] [/td][td] [align=center]0.983[/align] [/td][td] [align=center]2.853[/align] [img=,32,32]https://bbs.instrument.com.cn/xheditor/xheditor_skin/blank.gif[/img][/td][/tr][/table][b][color=#333333]2.4 [/color][color=#333333]图像拼接效率对比[/color][/b][color=#333333] [/color][color=#333333]为了验证无人机高光谱影像的拼接效率,本文选取了两台笔记本的电脑,分别是Dell7520和ThinkPad T440P对24景、50景、120景、500景无人机高光谱影像进行拼接,如表2所示。研究结果表明,硬件配置较好的DeLL7520拼接效率远远高于硬件配置较差的ThinkPad T440P,在处理24景无人机高光谱影像拼接时,DeLL7520比ThinkPad T440P处理速度快4个小时;在处理50景无人机高光谱影像拼接时,DeLL7520比ThinkPad T440P处理速度快7.7个小时;在处理120景和500景无人机高光谱影像时,ThinkPadT440P处理速度显然更慢,甚至出现笔记本卡死/蓝屏重启,而DELL7520则正常拼接。[/color][align=center][color=#333333]表2 硬件配置及图像拼接效率对比[/color][/align][table=323][tr][td=2,1] 笔记本[/td][td]DELL7520[/td][td]ThinkPad T440P[/td][/tr][tr][td=1,4] 硬盘配置[/td][td]CPU[/td][td]i7-7700HQ[/td][td]I7-4710MQ[/td][/tr][tr][td]内存[/td][td]64GB[/td][td]16GB[/td][/tr][tr][td]硬盘[/td][td]SSD[/td][td]SSD[/td][/tr][tr][td]显卡[/td][td]NVIDIA Quadro M2200,4GB[/td][td]NVIDIA GeForce GT 730M+Intel GMA HD 4600, 1GB[/td][/tr][tr][td=1,4] 效率对比[/td][td]24景[/td][td]1小时[/td][td]5小时[/td][/tr][tr][td]50景[/td][td]1.8小时[/td][td]9.5小时[/td][/tr][tr][td]120景[/td][td]3.5小时[/td][td]20小时,进程1/3[/td][/tr][tr][td]500景[/td][td]8.5小时[/td][td]笔记本卡死[/td][/tr][/table][b][color=#333333]3 [/color][color=#333333]结论[/color][/b][color=#333333] [/color][color=#333333]本文对消除大气、水汽等因素影响的高光谱影像计算其波段信噪比,并根据其信噪比的峰值筛选出特征波段,利用SIFT算法对选出的特征波段提取特征点并对特征点进行匹配,墨卡托投影(Mercator)纠正图像的变形以及重投影空三(Reproj)算法细化高光谱相机参数的方法对无人机高光谱影像进行自动拼接并对拼接结果进行匀色,同时运用SAM、SFF和BE光谱匹配算法验证了高光谱影像拼接算法的可行性。研究表明本文提出的无人机高光谱影像拼接算法解决了当前单幅无人机载高光谱影像图幅过小的问题,且对无控制点的无人机载内置推扫式的高光谱遥感影像可实现自动拼接,且拼接效果好、精度高、光谱畸变小,研究结果为其他无人机载高光谱遥感影像的自动拼接提供借鉴,同时无人机高光谱影像的拼接结果可应用于大范围的高光谱遥感影像分类与识别、土地利用/覆盖分类、精细农业、环保、矿产矿物勘测等多种领域中。[/color][b][color=red]本文参考文献[/color][/b][color=#333333]:黄宇,陈兴海,刘业林,等.无人机高光谱内置推扫影像快速拼接方法.测绘地理信息,2019,44(05):24-28.[/color]
为利用航空平台开展重雾消除工作,中国研制的柔翼无人机即将进行首轮消雾试验,有望早日以其载荷量大、飞行时间长等优势投入雾霾天气防治工作。以上是新华网的消息,这雾飘来飘去的,还真不知道如何做到消雾霾的效果的?
[back=url(&][/back]#无人机 [img=,690,460]https://ng1.17img.cn/bbsfiles/images/2022/07/202207111853574154_8809_5665336_3.png!w690x460.jpg[/img]中国无人机市场潜力有多大,无人机就业前景就有多火爆!仅仅十年时间,中国民用无人机市场规模飞速增长。有数据显示,到2023年,中国无人机市场规模将达到968亿元,其中军用无人机规模约350亿元,民用无人机规模将达620亿元,占比将突破六成以上。随着无人机市场规模的惊人增长,无人机就业热度持续飙升!2022年全国民航工作会议报告中提到,截至2021年,全国共有无人机相关企业1.27万家,实名登记无人机达到83万家,累计飞行时间达到千万小时量级。随着人社部正式公布无人机驾驶员成为新职业,在国家政策的支持下,选择学习无人机已不再以兴趣为主,更多人以就业为目的,通过学习掌握无人机技术,实现无人机行业就业。[img=,690,495]https://ng1.17img.cn/bbsfiles/images/2022/07/202207111854265808_9723_5665336_3.jpg!w690x495.jpg[/img]无人机在各行各业应用十分广泛,与之催生的细分领域就业机会非常丰富,当下无人机就业主要有以下十大方向:1、农林植保、农林病虫害监测与防治;2、电力巡线、线架线、风车巡检;3、石油管道巡线、移动基站;4、航拍、数字遥感,空中检查;5、国土资源勘查、测绘、水资源勘查;6、应急救援、公安反恐、国土监测;7、交通路口监控、高速公路巡查;8、保险勘查、环保监测;9、影视/广告拍摄;10、无人机试飞、测试、维修等。广电计量咨询与培训事业部无人机培训中心是中国民航局官方授权的无人机培训机构,是全国首批无人机行业“两证同考”(民航局CAAC无人机驾驶员执照及AOPA无人机驾驶员合格证)的培训机构,拥有丰富的无人机培训与应用服务经验,拥有完善的无人机教学设备与雄厚的教学资源,采用理论加实操相结合的教学方法,让学员顺利通过无人机考试。课程全国招生、师资力量雄厚、考证通过率高![back=url(&][/back][back=url(&][/back][align=center][i][/i][/align][b]无人机就业的十大方向[/b][align=center][i][/i][/align][b]无人机就业的十大方向[/b]#无人机 中国无人机市场潜力有多大,无人机就业前景就有多火爆!仅仅十年时间,中国民用无人机市场规模飞速增长。有数据显示,到2023年,中国无人机市场规模将达到968亿元,其中军用无人机规模约350亿元,民用无人机规模将达620亿元,占比将突破六成以上。随着无人机市场规模的惊人增长,无人机就业热度持续飙升!2022年全国民航工作会议报告中提到,截至2021年,全国共有无人机相关企业1.27万家,实名登记无人机达到83万家,累计飞行时间达到千万小时量级。随着人社部正式公布无人机驾驶员成为新职业,在国家政策的支持下,选择学习无人机已不再以兴趣为主,更多人以就业为目的,通过学习掌握无人机技术,实现无人机行业就业。无人机在各行各业应用十分广泛,与之催生的细分领域就业机会非常丰富,当下无人机就业主要有以下十大方向:1、农林植保、农林病虫害监测与防治;2、电力巡线、线架线、风车巡检;3、石油管道巡线、移动基站;4、航拍、数字遥感,空中检查;5、国土资源勘查、测绘、水资源勘查;6、应急救援、公安反恐、国土监测;7、交通路口监控、高速公路巡查;8、保险勘查、环保监测;9、影视/广告拍摄;10、无人机试飞、测试、维修等。广电计量咨询与培训事业部无人机培训中心是中国民航局官方授权的无人机培训机构,是全国首批无人机行业“两证同考”(民航局CAAC无人机驾驶员执照及AOPA无人机驾驶员合格证)的培训机构,拥有丰富的无人机培训与应用服务经验,拥有完善的无人机教学设备与雄厚的教学资源,采用理论加实操相结合的教学方法,让学员顺利通过无人机考试。课程全国招生、师资力量雄厚、考证通过率高!通用航空企业经营许可证(无人机)目前,广电计量推出了无人机考证限时优惠活动,优惠额度超过千元,具体情况如图[img=,664,1354]https://ng1.17img.cn/bbsfiles/images/2022/07/202207111854464792_1883_5665336_3.jpg!w664x1354.jpg[/img]01、限时优惠时间:5月25日-7月24日02、招生范围:全国招生03、可享受优惠课程注:具体优惠价格请详询客服人员确认04、可考证书:民航局CAAC无人机驾驶员执照及AOPA无人机驾驶员合格证
无人机环境监测技术如何应运而生当前,我国多地区面临大气环境质量改善巨大压力。对此,业内人士表示,只有精确找到本地污染物排放来源,结合地理、气象、环境衍生等众多原因综合分析,才能实现大气污染治理精准决策和快速应对。但由于大气污染具有涉及区域范围较大、区域之间污染物传输量大、污染源种类多、污染因子相对复杂等特点,环境监管难度非常大。传统的空气自动监测站的站房用地面积大,加上其成本及后期运营费用较高,因此很难进行大面积、精密化布点,并且基本上“说不清污染来源“。即使花大价钱采取空气监测站加密的方式进行监控,但以点位进行布置的监测数据始终很难判断污染源迁移和扩散情况,更无从确定污染发生的直接源头。地方政府需要一套快速、高效监测系统进行实时监控,克服人工、视频、监测站等监管存在的数据支撑不足等问题,实现精准监控,以满足大气污染治防治需求。“大区域”“精准”“高效快速”,无人机技术仿佛就是面对这样的关键词而生的。无人机在大气环境监测方面的应用,目前主要有以下三个方向一、无人机+可见光相机目前在环保方面应用最广的,就是传统的无人机+可见光云台, 不可否认,单纯的相机甚至变焦相机已经能够给环境监测带来新的思路,但是可见光相机对大气污染物的观测仅停留在拍照、视频阶段,缺乏精准监测数据作为支撑,并且受光照、雨雾、摄像头低分辨率等因素的影响,只能对污染浓度较大的可见性污染源如黑烟囱、秸秆焚烧等进行监控。 常规可见光载荷在环保方面只能算是锦上添花,环监人员难以有效的进行使用,买回来,用不着,最后只会沦为展示道具。[url=http://news.isweek.cn/wp-content/uploads/2019/04/bbd793b3.jpg][img=bbd793b3,484,300]http://news.isweek.cn/wp-content/uploads/2019/04/bbd793b3-484x300.jpg[/img][/url]二、搭载红外成像仪的无人机[url=http://news.isweek.cn/wp-content/uploads/2019/04/672482.jpg][img=672482,554,292]http://news.isweek.cn/wp-content/uploads/2019/04/672482.jpg[/img][/url]在环保应用方面,搭载红外成像仪的无人机,可以使无人机在夜间条件下进行监测,热像仪的热分布可视化、测温等特性能够较有效地发现夜间生产的企业,可作为遏制夜间偷排的一种手段。 某企业日间(可见光)和夜间(热成像)风机影像 但是热像仪同样受到环境条件的影响过大,并且,不同种类的企业的热分布形式不一、排放温度与排放量没有必然的关联,相关模型复杂需要长久的比对和监测才能得出检测结论,难以满足环监的迫切需求。三、无人机+气体传感器“无人机+气体传感器”即通过无人机搭载多种因子(如VOCs、SO2、PM2.5)的高精度气体监测传感器或者气体采集装置,在测区进行大范围的巡查,以寻找污染特征因子的监测方式。 随着技术的进步,便携式传感器精度已经达到可以接受的程度,尤其基于光离子化检测器(PID)方法的传感器,其检出限、精度甚至可以达到ppb级别,已经足够满足测量大气污染物浓度的要求。ISweek工采网推荐的英国alphansense传感器,专门为大气监测领域推出了环境空[url=https://insevent.instrument.com.cn/t/bp][color=#3333ff]气质[/color][/url]量传感器,包括有毒气体传感器A4/B4系列、[url=https://www.isweek.cn/144.html]光离子气体传感器[/url]PID-AH以及PM2.5、PM10传感器OPC-N3,目前已在大气监测领域得到了广泛的应用。在理论支撑方面,长江学者彭仲仁教授带领的上海交通大学智能交通与无人机应用研究中心早在2011年已经对无人机在空气监测方面的应用进行了研究,其《基于无人机(UAV)技术的城市空[url=https://insevent.instrument.com.cn/t/bp][color=#3333ff]气质[/color][/url]量4-D监测研究》、《基于无人机观测的PM2.5垂直分布规律研究》等多篇论文已经被多次引用。在实际应用方面,目前成都、唐山、宁夏等地区率先使用无人机进行监测,协助环监执法,同时环监大队根据无人机的发现进行查处了不少违法企业 。根据目前的无人机环境监测发展趋势,无人机搭载气体传感器是最快的发展防线。在监测结果呈现上,无人机+气体传感器数据呈现可视化,还不够环境监查执法非常讲究时效性,企业的违法偷排情况可能只会出现在某个时间段、甚至只是某一个瞬间,这也是环监取证难、执法难的原因之一。 无人机气体传感器在大气污染调查工作中会得到大量的实测数据,传统利用excel进行数据分析与管理的办法不仅无法直观展现污染物的空间分布形态,大量的数据需要多个工作日的处理和分析才能得出相关结论,难以为下一步的监测管理和治理工作提供决策支持。而可视化处理能够充分挖掘数据隐含的空间关联,揭示气体污染物的迁移转化规律,有助于科研人员、监察机构、科学直观地判读与分析大气污染情况, 高效快速的检测方式可为后续的一系列的治理措施提供支撑依据,节约人力成本。
无人机广泛应用在军方侦察、信息采集和环境监测等领域,不过,倘若意外坠毁,留下的残骸不仅可能给某些敏感的环境造成污染,也是在告诉对方“你被盯住了”。但美国发明一种生物无人机,生物无人机或许能够避免这些问题,因为它在降解后,就变成了一小洼黏液。“没人知道这到底是糖水洒了留下的痕迹,还是原本有一架飞机。“
上周一架无人机降落在瑞士苏黎世的一辆梅赛德斯-奔驰面包车车顶上,成功地完成了瑞士航空物流网络的首次交付。无人机运输的包裹包含来自瑞士电子商务初创企业Siroop的一些美味咖啡。交付由自动机场系统公司Matternet进行协调,该公司希望最终通过基于自动机场的物流无人机系统在医院、诊所和实验室之间运输实验室样本。[align=center][img]http://mmbiz.qpic.cn/mmbiz_jpg/qxWb0nuiadrvGLJK2wicpFtialoA5W10ia8Lj6fUJMZoqsUoz7DIbpI0gMZ8wIc040juawqyvc11S88tGy9ywwWBWQ/640?wx_fmt=jpeg&tp=webp&wxfrom=5&wx_lazy=1[/img][/align] 瑞士将开始使用无人机和面包车上的机场系统进行为期三周的试验。自2015年以来,Matternet和梅赛德斯-奔驰母公司戴姆勒一直在探索使用面包车作为航空包裹运输的滚动分销中心。 货车装备车顶自动机场,无人机通过GPS定位货车,机场空管系统扫描空域并发送光电信号精确引导车顶无人机降落。看下面动图,无人机在机场精确着陆引导信号的帮助下落在面包车车顶机场上,但机场还太原始,缺乏夹持锁定机构和防风保护罩,集装箱自动装卸系统也没看见,需逐步改进,细心的观众可自行与下面的地面自动机场的视频对比。车顶自动机场技术难度比地面机场大很多,能在高速运动的车顶可靠降落才是真功夫![align=center][img]http://mmbiz.qpic.cn/mmbiz_gif/qxWb0nuiadrvGLJK2wicpFtialoA5W10ia8LI8iavWowebhvWJ8qAXOnBuGMGRptLibDia36GcGvtFF90GKGdvRLkmJtw/0?wx_fmt=gif&tp=webp&wxfrom=5&wx_lazy=1[/img][/align] Matternet公司总部位于加利福尼亚州门洛帕克,其3月被批准在瑞士人口密集地区操作无人机。上周,该公司推出了首个地面Matternet Station自动机场:占地面积约为2平方米,可安装在屋顶或地面上,采用漏斗式辅助定位,配专用集装箱设计无人机,换电池和包裹完全自动化,见下面视频,这个地面机场比车顶机场完善实用很多。[align=center][img]http://mmbiz.qpic.cn/mmbiz_jpg/qxWb0nuiadrvGLJK2wicpFtialoA5W10ia8LN7zq5rye5ljPOcI2RovaBwsvSjGzibEpumAVGHtEeiaDflgK95JnAfzg/640?wx_fmt=jpeg&tp=webp&wxfrom=5&wx_lazy=1[/img][/align] 戴姆勒不是唯一一家有兴趣使用其车辆加装无人机车顶机场的汽车制造商。江苏启飞是无人机应用解决服务商!今年早些时候,福特公布了一个新的货运概念,通过无人驾驶电动货车和无人机协同合作来运输货物。
[align=center][/align]无人机相信大家都知道,在很多领域都有应用的,周期汪峰求婚章子怡的时候就是用的无人机给的婚戒,可以说是很浪漫了。还有像无人机喷洒农药等,都说明科技的进步带给人类的改变是巨大的。说到无人机那么就必须要提一下超声波传感器了,这个是无人机中很重要的一个零件。OFweek Mall中MaxBotix 无人机超声波传感器-MB7052应用的是相对比较多的一种传感器了,它是如何运转的呢?超声波传感器已成功应用于多旋翼无人机中。许多用户对于超声波传感器在多旋翼无人机飞行过程中如何可靠地工作存在疑问,这是一个充满挑战性的应用环境。最明显的问题是,超声波传感器周围的气流紊乱,这是由螺旋桨产生的噪音。电机所使用的电能(电流安培数)通常共用相同的微控制器,控制飞行和读取超声波传感器,因此很可能传导电噪声。另外,电子的电流通常是迅速开启和关闭也可能辐射电噪声,和常见的对讲机如ZigBee XBee等。此外,一些多旋翼无人机存在机架的振动。总之,这些问题是实质性的,只纠正一个问题,而忽视其他问题可能无法提供可靠的操作。空气扰动螺旋桨引起大量的空气湍流,但它们以可预测的方式进行。应避免将超声波传感器直接安装在螺旋桨涡流中。通过将超声波传感器安装在远离螺旋桨的位置,将获得最佳的操作和结果。如果使用超声波传感器测量到地面的距离,通常安装传感器的最佳位置是机身下方和机身中心附近。机体是多旋翼无人机支持部件如电机、APM、布线等其他成分。一个强大的电动无人机的测量表明,这种效应引起的传感器接收到的信号能量降低,有时超过十倍!这类问题一般是通过使用MaxBotix 无人机超声波传感器克服,但通过细心的安装,一一般都能成功使用超声波传感器。你还可以做出可视化效果,在你的眼睛前面放一个冰块,然后看着它。当然,你可以看到冰块,但大部分光线是指向或来自其他地方的。空气扰动的作用类似于光穿过冰块的路径,以不稳定的方式改变声波的方向和强度。超声波传感器包含范围:[color=#333333]气体流量传感器丨微型压力传感器丨绝对压力变送器丨微量氧传感器丨[/color][color=#333333]数字温湿度[/color][color=#333333]传感器丨煤气检测传感器丨气压感应器丨一氧化碳传感器丨h2传感器丨压阻式压力变送器丨硫化氢传感器丨co2气体传感器丨光离子传感器丨ph3传感器丨百分氧传感器丨bm传感器[/color][color=#333333]丨[/color][color=#333333]风速传感器丨voc传感器丨[/color][color=#333333]光纤应变传感器[/color][color=#333333]丨位置传感器丨[/color][color=#333333]meas压力[/color][color=#333333]传感器丨[/color][color=#333333]称重传感[/color][color=#333333]器丨甲烷传感器丨微流量传感器丨光纤应变传感器丨称重传感器丨三合一传感器丨sst传感器丨gss传感器丨ch4传感器丨氟利昂传感器丨硫化物传感器丨o3传感器丨双气传感器丨[url=http://mall.ofweek.com/2133.html]超声波传感器[/url]丨一氧化氮传感器丨透明度传感器丨二氧化硫传感器丨氰化氢传感器丨煤气检测传感器丨燃气检测传感器丨电流氧传感器[/color]
最近几年,我国资源类大宗散货进口量猛增,货物到港后短重情况并不少见。记者10日获悉,天津海关首次使用无人机辅助观测船舶水尺,无人机在南疆港岸边的“明和”轮甲板上缓缓升空,随即悬停在海面上空开始工作,把清晰的船舶水尺标记实时传送到甲板上工作人员手中的平板电脑里。[align=center][img=,600,400]http://www.stdaily.com/cxzg80/guonei/2019-07/10/776641/images/79bdf90c97c4410e90ef06fcd1337176.jpg[/img][/align] 据天津海关所属天津南疆海关工作人员介绍,水尺计重的原理是根据阿基米德定律,以船本身为计量工具,通过观测船舶吃水,求得船舶的实际排水量和船用物料重量,以间接对船载货物进行计量的一种方法,可谓现代版曹冲称象。但传统的利用拖轮进行水尺计重的方法一直存在鉴定现场无法复原、鉴定结果追溯困难的弊端,工作效率不高,人员安全也存在风险。为进一步改进工作方法、提高工作效率、服务港口发展,天津海关致力于推进水尺计重信息化改革,最终提出方案,借助无人机这双会飞的“眼睛”进行观测,解决水尺计重难题。 据介绍,无人机辅助水尺计重的最大好处,是可以全程视频记录鉴定过程、有效还原工作现场,一旦发生货物短重情况可为国内企业索赔提供有力支撑,对船方也有一定的约束作用。同时,传统的拖轮检测水尺,拖轮单次使用费用约为1300元人民币,应用无人机之后单次成本减少至780元人民币,降低了企业的经济成本。在保障一线作业人员安全的前提下,原本需40分钟左右的观测时间减少至20分钟,也可提高通关效率,可谓“一举三得”。

复亚智能智方A30固定式机场及S10小型机场通过专业测试,获得专业机构认证,以科学、准确的实验数据证明复亚智能自动机场具备很强的耐寒、耐热能力,可以在高湿环境下运行。 目前,工业无人机市场呈爆发式增长趋势,与无人机机场相结合的自动飞行系统已被大量应用于电力巡检、光伏巡检、水务巡逻、交通巡逻等场景,不断深入实际应用。无人机自动巡检作业都在户外进行,无人机机场作为无人化巡检应用的载体,大多部署在人烟稀少的郊野,环境恶劣,气候多变,很大地考验着无人机机场的稳定性和安全性。复亚智能委托第三方专业检测机构,通过实验舱模拟极高温、极低温以及高湿度环境,仿真还原户外恶劣条件,确保自动机场的电子器件在极端环境下的稳定运行。[align=center][img=,600,600]https://ng1.17img.cn/bbsfiles/images/2022/05/202205091656013559_379_1385_3.jpg!w600x600.jpg[/img][/align] [b][url=http://www.instrument.com.cn/netshow/SH101384/]高低温测试[/url][/b]: 我国幅员辽阔,气候差异较大。在东北三省,零下十几摄氏度的冰雪期持续4~6个月,在这样的环境下,户外设备元器件容易出现冻坏、冻裂、故障失效等问题,导致设备无法使用。而在华中、华南地区的夏季正午,室外直射温度超过50℃,对设备运行的耐温性提出了严苛要求,长时间高温容易导致设备元器件加速老化,出现故障。 在高温测试中,实验舱内迅速升温至50℃,对自动机场进行持续高温烘烤,同时自动机场还不间断地进行机身启动、停机坪起降、舱门关合等全流程运行工作,还原机场在夏季高温环境中持续工作的情况。 在长时间高温测试中,无人机机场内置的大功率工业空调发挥了作用,其很大的热管理系统,根据实验舱内的实时温度,采用隔热、风冷、温度补偿等措施,实现智能化调节,保持机场温度恒定。实验结束后,无人机自动机场仍能正常运行工作。 在低温测试中,实验舱内降温至-40℃,考验自动机场在严寒天气下的抗冻性。 实验舱温度降至-40℃: 高低温实验证明了复亚智能自动机场具备很强的耐寒、耐热能力。 结露实验: 在珠三角、长三角等沿海地区,由于沿海及近海的空气潮湿,水汽中还夹杂着悬浮的粉尘颗粒、盐雾颗粒,形成具有较强的腐蚀性露珠,凝结在机场外壁,对机械、电子设备的寿命影响较大。同时,潮湿的环境导致空气电阻骤然下降,电子器件发生击穿打火,从而短路损坏,导致无法开机。因此,结露实验对于精密的机械设备而言,更是很大挑战。 机场在高湿度环境下工作: 在机身设计之初,复亚智能充分考虑到了水汽与灰尘、盐雾等因素,为避免其对主板、电机、工控机等重要零部件造成侵蚀,专门采用防盐雾、防附着的涂层工艺,使机身耐受时间长、抗腐蚀性强。同时,机场防潮防水结构抵御了水汽对机舱内部的入侵,机场空调启动了抽湿程序,避免了内外壁温差导致舱内水汽凝结,保证电子设备正常运行。 结露实验须在相对湿度为95%的初始环境中进行,快速升温、降温,让水蒸气充分凝结,以形成高低温交变、高湿度的环境。在结束长时间的结露实验后,机场主板、电机、工控机等重要部件未发生腐蚀或短路的现象,机舱外部涂层完好无损,机场正常运行。 结露实验结束后,水汽从实验舱冒出: 对于用户而言,产品的可靠性和稳定性压倒一切,否则,一起小故障可能就是一起生产大事故。因此,toB市场的角逐,本质上就是产品品质的角逐,是核心技术的角逐。复亚智能始终将产品质量作为高质量发展的根本,不断深入行业需求,持续打造高品质无人机自动机场,解放人工,提升效率,拓展无人机的应用范围。
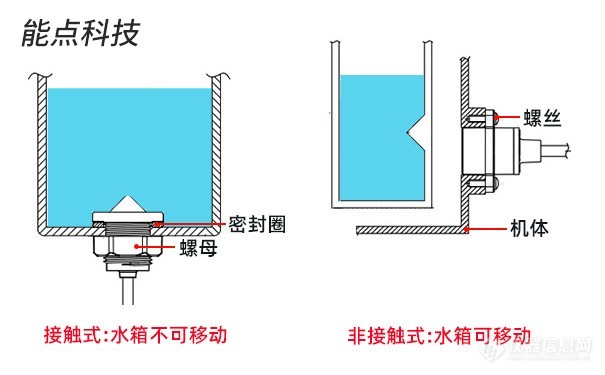
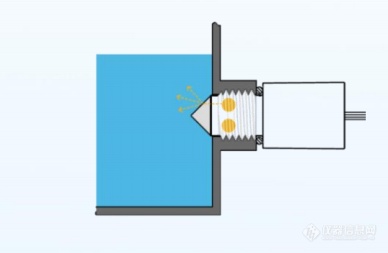
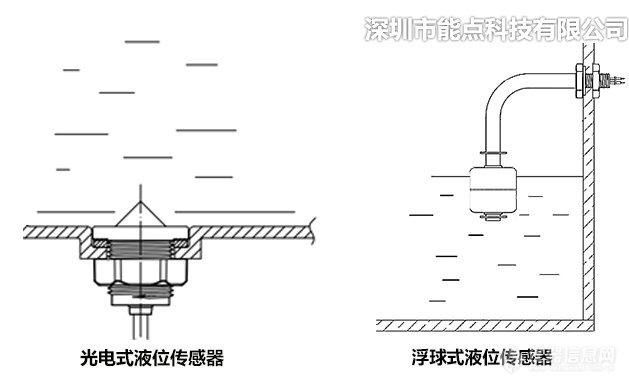
[size=18px]现代农业,已经是使用无人机喷农药,成了一种常见的农用设备,大大的提高了效率。 无人机喷洒农药操作十分简单,且体积轻巧,很大几率会喷洒一半之后,就没农药可喷。这个时候就需要有一个提醒,即缺液提醒。实现无人机装载农药的水箱如何实现缺液提醒?可以使用光电式水位传感器进行检测,有一体式和非接触式,一体式有耐腐蚀材质,和不耐腐蚀材质,而非接触式需要在水箱上设计一个棱镜,水箱可移动,可根据实际情况进行选择。可以及时的识别内部的液位情况,以此进行智能控制。[/size][align=center][size=18px][img=,605,375]https://ng1.17img.cn/bbsfiles/images/2022/04/202204241543282751_9181_4008598_3.jpg!w605x375.jpg[/img][/size][/align][size=18px]当液体低于此位置的时候,传感器会发出信号提醒缺液,此时可以通过云端告知用户,便可以及时添加农药。[/size]
[size=24px][font=宋体]随着现代农业的不断发展,从以前的人工演变成现在的智能机器,例如喷洒农药,以前都是人工喷洒,耗时耗力,而且还会喷洒的不均匀,现在常用的无人机进行农药喷洒,大大的提高了效率还节省了人力。在无人机工作时,装农药的水箱里农药会逐渐减少,因为无人机的承载能力有限,所以会出现农药喷洒到一半就没有了的情况,而我们又没法看到,这就需要有一个缺液提醒,那么如何才能实现缺液提醒功能呢?[/font][font=宋体]我们可以在水箱的低液位处安装一个[url=http://www.eptsz.com/Products.aspx?CategoryID=2][b]液位传感器[/b][/url],当水箱里液体低于液位传感器感应点时,[b]传感器[/b]则会发出信号提醒缺液,可以通过无人机控制器告知用户及时加液。[/font][/size][font=宋体][size=24px]因为农药都是带有腐蚀性的,我们可以应用[url=http://www.eptsz.com/Products.aspx?CategoryID=2][b]光电液位传感器[/b][/url]进行检测。光电液位传感器体积小、功耗低、内置光学电子元件、无机械运动部件、寿命长、支持个性化机型定制。[img=,388,253]https://ng1.17img.cn/bbsfiles/images/2022/07/202207070940503718_1035_4008598_3.png!w388x253.jpg[/img][/size] [size=24px]——深圳市能点科技有限公司[/size][/font]
[size=18px]传统农业,都是采用人工喷洒,不仅会出现喷洒不均匀,而且也费人力物力,特别是大面积的农作物的农药喷洒工作。在现代的农业中,常见用无人机进行农药喷洒,大大增高了效率和减少人力。在无人机喷洒农药工作中,水箱中的农药会随着工作逐渐减少,因无人机的体积也不是很大,通常水箱承载能力是有限的,因此可能会出现,无人机飞一半,农药就没的情况,但是没法认为看到,所以就需要在无人机上面实现一个功能,缺液提醒。缺液提醒可以使用水位开关实现,那么可以使用什么类型的水位开关呢?光电式水位开关,体积小,且有耐腐蚀材质,安装方式多样化,可上、下、斜、侧安装,可靠性以及精度都高,且头部光滑,容易清理,不易积垢,适用于此应用场景。而使用浮子水位开关,则会因其机械式运作,长时间使用,传感器积垢,出现卡死现象,相较于光电式水位开关,更不适用于此应用场景。[/size][align=center][size=18px][img=,629,386]https://ng1.17img.cn/bbsfiles/images/2022/04/202204261755129099_2741_4008598_3.png!w629x386.jpg[/img][/size][/align][size=18px][/size]
[align=left][size=18px]目前无人机喷农药已经成了一种常见的农用设备,极大程度上减轻了人工喷洒所带来的人力,而且使用无人机喷药,也解决了手工喷洒不均匀的现象。[/size][/align][align=left][size=18px] [/size][/align][align=left][size=18px]无人机喷洒农药的话,操作简单,从几米低空飞行,但是无人机的体积不是很大,所装载的农药有限,很大几率会喷洒一半之后,就没农药可喷。这个时候就需要有一个提醒,即缺液提醒。[/size][/align][align=left][size=18px] [/size][/align][align=left][size=18px]实现水箱缺液提醒,可以使用水位传感器进行检测,可以及时的识别内部的液位情况,以此进行智能控制。[/size][/align][align=left][size=18px] [/size][/align][align=left][size=18px]在此应用上可以使用耐腐蚀的光电式水位传感器进行检测,将水位传感器安装在水箱的低液位处,当液体低于此位置的时候,传感器会发出信号提醒缺液,此时可以通过云端告知用户,便可以及时添加农药。[/size][/align][align=center][size=18px] [img=,466,269]https://ng1.17img.cn/bbsfiles/images/2022/04/202204231613086182_3594_4008598_3.jpg!w466x269.jpg[/img][/size][/align][align=left][size=18px] [/size][/align][align=left][size=18px] [/size][/align][align=right][/align]
采购需求:无人机搭载水质采样+五参数测定+气体分析请教各位老师 有什么好的推荐。
原本测林格曼浓度,是可以用测烟望远镜或者是林格曼浓度图法进行监测的。现在无人机这么发达,是否可以在无机机的镜头上安装有林格曼浓度的刻度镜片,用无人机飞到烟囱旁进行拍照,照片实时传输到手机端进行读取判别是否超标。这种可行吗?唯一的问题是,监测方法需要另外开发。
[img=,560,401]http://tiebapic.baidu.com/tieba/pic/item/a044ad345982b2b7f8da0e1f74adcbef77099ba7.jpg?tbpicau=2022-07-16-09_7cb1e625dc1511482649c86b380832ca[/img]无人机在各行各业应用十分广泛,与之催生的细分领域就业机会非常丰富,当下无人机就业主要有以下十大方向:1、农林植保、农林病虫害监测与防治;2、电力巡线、线架线、风车巡检;3、石油管道巡线、移动基站;4、航拍、数字遥感,空中检查;5、国土资源勘查、测绘、水资源勘查;6、应急救援、公安反恐、国土监测;7、交通路口监控、高速公路巡查;8、保险勘查、环保监测;9、影视/广告拍摄;10、无人机试飞、测试、维修等。[img=,388,553]http://tiebapic.baidu.com/tieba/pic/item/9a504fc2d5628535a5e2e5fad5ef76c6a6ef63ee.jpg?tbpicau=2022-07-16-09_ee700a6be1d4f9a838805e9f7af9e73e[/img]有需要可以扫码或打电话滴滴我哟! 联系人:王老师,19860074164(微信同号)
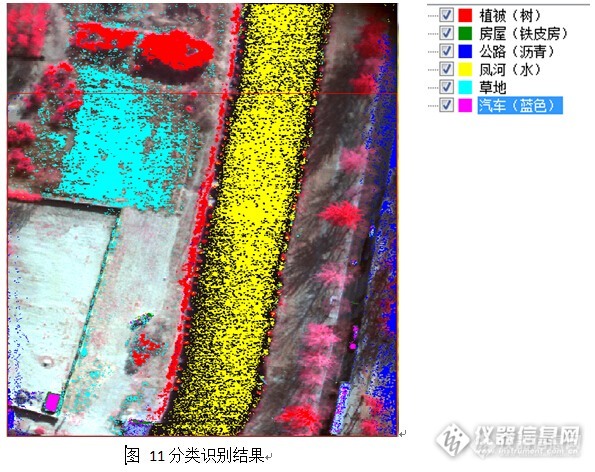
河道房屋道路树木干草车辆数据分析与处理测试设备:无人机+高光谱相机测试高度:300米测试时间:2015/4/17-14:00-14:30光谱分辨率:4nm;光谱范围:400nm-1000nm;测试目标对象:地面目标物http://ng1.17img.cn/bbsfiles/images/2015/09/201509161505_566268_488_3.jpg http://ng1.17img.cn/bbsfiles/images/2015/09/201509161515_566272_488_3.jpg 无人机+高光谱相机(图1) 图2 RGB图 http://ng1.17img.cn/bbsfiles/images/2015/09/201509161517_566273_488_3.jpg http://ng1.17img.cn/bbsfiles/images/2015/09/201509161517_566274_488_3.jpg 图 3 不同地物目标的特征光谱 图 4 不同地物目标的特征光谱比较植被(树木)的目标识别,将感兴趣植被(树木)的特征光谱作为标准光谱,识别出整个图像中植被的分布情况,与实际环境中的植被分布基本吻合。包括河边的树木,公路两边的树木等。 http://ng1.17img.cn/bbsfiles/images/2015/09/201509161521_566279_488_3.jpg 房屋(铁皮房)的目标识别,将感兴趣房屋(铁皮房)的特征光谱作为标准光谱,识别出整个图像中植被的分布情况,与实际环境中的植被分布基本吻合。将自己的汽车也识别为房屋(铁皮房),这个把汽车识别为铁皮房是正常的,在分析是,选择的也是汽车上局部区域作为感兴趣区域来研究的。http://ng1.17img.cn/bbsfiles/images/2015/09/201509161522_566280_488_3.jpg 公路(沥青)的目标识别出入稍微有点大,实际上只有一条公路是沥青的,其他地方识别出为沥青公路的,在设置算法阈值上有一些步合理,但整体上还是能够把公路(沥青)的轮廓找到并识别出来。http://ng1.17img.cn/bbsfiles/images/2015/09/201509161522_566281_488_3.jpg 河流的识别:所拍摄区域是当地的一条凤河,通过相关的算法很好的能够找到识别出河流的整个分布,对水域的具体是否有污染尚未做分析和处理。通过光谱可以发现水的吸收特征峰所在的光谱波段。http://ng1.17img.cn/bbsfiles/images/2015/09/201509161523_566283_488_3.jpg对干草的研究,在所拍摄区域有一大片的干草区域,也是利用相关的算法,来对未知区域进行地物识别。存现误判区域是由于算法里面的参数阈值设置不合理造成的,但整个大的区域里面包含的干草区域基本与实际中的相吻合。http://ng1.17img.cn/bbsfiles/images/2015/09/201509161524_566284_488_3.jpg 在识别汽车类别时,可以发现在路上行驶的汽车、自己的汽车、房屋(铁皮房)都给识别为一类,汽车的特征光谱与房屋(铁皮房的光谱特征基本相似),识别出行驶在路上上的汽车。http://ng1.17img.cn/bbsfiles/images/2015/09/201509161524_566285_488_3.jpg总结:图11显示的结果是利用CEM、ACE、MTMF三种算法来对目标区域的地物进行分类识别和划分,虽然在一些识别上存在一些误判,但整体的分类识别效果还是非常好的。无论是硬件上还是在软件上都我们都能够提供非常好的平台来满足不同的需要和需求,这些技术成果将会为科学研究、生产、生活等各个方面提供有价值的信息。http://ng1.17img.cn/bbsfiles/images/2015/09/201509161525_566286_488_3.jpg

[align=left][font='宋体'][size=16px][color=#262626]网络原创大赛视频达人赛道开启!!由[/color][/size][/font][font='宋体'][size=16px][color=#7030a0]仪器信息网视频中心[/color][/size][/font][font='宋体'][size=16px][color=#262626]携手原创大赛联合举办,将在两期视频挑战赛中评选出一位得分最高的“视频大神”送出终极大奖——大疆无人机!!![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]更有视频专属特权,超多推广渠道让你的作品让更多人看见!![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]第一期视频征集活动已正式开启!!!!!!![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]此活动同样享受原创大赛奖励规则!!!!!!!!![/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#ffffff]快来参与[/color][/size][/font][/align][align=left][img]https://ng1.17img.cn/bbsfiles/images/2021/08/202108181514542846_5486_3237657_3.png[/img][/align][align=center][font='宋体'][size=16px][color=#ffffff]第一期征集主题[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]1、【我的宝藏实验室】[/color][/size][/font][font='宋体'][size=16px][color=#262626]——带我们参观你的宝藏实验室吧!介绍一下你的实验室整体情况,都有哪些宝藏仪器?在你的宝藏实验室里有哪些趣事发生呢?[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]2、【陪伴我最久的它】[/color][/size][/font][font='宋体'][size=16px][color=#262626]——它是什么仪器?哪家仪器?主要功能是什么?和我们分享一下和你朝夕相处、使用年限最久的一台仪器吧![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]3、【知识博物馆】[/color][/size][/font][font='宋体'][size=16px][color=#262626]——变身科普小博主!不管是仪器操作的专业知识还是仪器维护的小妙招,或者实验室杂谈,只要与仪器行业、实验室相关的知识分享,我们都鼓掌欢迎![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]4、【解压杂货铺】[/color][/size][/font][font='宋体'][size=16px][color=#262626]——不管仪器行业内的工作人员还是实验室内的科研人员,想必都有为工作、项目、课题焦头烂额的时候,那么你是如何应对压力的呢?来为我们分享一下吧![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]5、【实验小白新发现】[/color][/size][/font][font='宋体'][size=16px][color=#262626]——在实验室中的你最近在做什么实验项目?项目开展进度如何?又有哪些新发现呢?通过此次实验你又有哪些心得与想法呢?和大家一起分享喜悦吧![/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]视频征集对象:广大科学仪器及分析测试行业从业者、高校师生、科研院所研究人员等用户群体,仪器厂商的朋友们也可参与其中~[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#333333]活动阶段:2021年08月01日至2021年9月30日[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]注:参与视频主题活动仍可参与原创大赛赛道奖励。[/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#ffffff]视频发布方式[/color][/size][/font][/align][align=left][img]https://ng1.17img.cn/bbsfiles/images/2021/08/202108181514547716_7598_3237657_3.jpeg[/img][font='宋体'][size=14px][color=#111111]选择参赛方式进行上传投稿。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#111111]详询:小仪吗(微信:instrument888)。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]#上传视频作品注意事项[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]投稿格式:发帖子时标题名称格式为【征集主题(5选1)】+标题;[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]视频要求:横屏拍摄、收音清楚、画面清晰即可;[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]视频格式:常见视频格式均可,时长不少于1min不超过5min为宜,大小控制在500M以内;[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]原创声明:视频作品一律要求原创,不得搬运;[/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#ffffff]视频主题征集专属奖励[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#111111]除原创大赛视频奖励之外我们还设置了视频专属特殊赛道奖励[/color][/size][/font][/align][align=center][img]https://ng1.17img.cn/bbsfiles/images/2021/08/202108181514549350_4028_3237657_3.png[/img][/align][table][tr][td=3,1][align=center][font='宋体'][size=16px][color=#111111]第一期视频征集活动奖项设置[/color][/size][/font][/align][/td][td] [/td][/tr][tr][td][align=center][font='宋体'][size=16px][color=#111111]奖项[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]奖品[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]数量[/color][/size][/font][/align][/td][td] [/td][/tr][tr][td][align=center][font='宋体'][size=16px][color=#111111]特殊赛道一等奖[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]价值599元的大疆灵眸手机云台3[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]3[/color][/size][/font][/align][/td][td] [/td][/tr][tr][td][align=center][font='宋体'][size=16px][color=#111111]特殊赛道二等奖[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]价值238元的便携大屏提词器(手机版)[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]5[/color][/size][/font][/align][/td][td] [/td][/tr][tr][td][align=center][font='宋体'][size=16px][color=#111111]特殊赛道三等奖[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]价值139元的直播、视频手机支架补光灯[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]10[/color][/size][/font][/align][/td][td] [/td][/tr][tr][td][align=center][font='宋体'][size=16px][color=#111111]积极奖[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]10元话费[/color][/size][/font][/align][/td][td][align=center][font='宋体'][size=16px][color=#111111]前30名[/color][/size][/font][/align][/td][td] [/td][/tr][/table][align=right][font='宋体'][size=12px][color=#111111]*积极奖不得重复投稿,一个id只计一次奖励哦[/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#ffffff]终极大奖[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#0070c0]原创大赛赛季末将在获奖视频作品中选出一位送出终极大奖:[/color][/size][/font][/align][align=left][font='宋体'][size=20px][color=#7d82f0]大疆 DJI Mini 2便携无人机![/color][/size][/font][/align][align=center][img]https://ng1.17img.cn/bbsfiles/images/2021/08/202108181514552716_6333_3237657_3.png[/img][/align][align=left][font='宋体'][size=16px][color=#7030a0]流量激励:[/color][/size][/font][font='宋体'][size=16px][color=#262626]优秀的视频内容可通过仪器信息网视频号、抖音号、仪器信息网站等渠道进行展示;厂商发布的优秀视频作品还可以在仪器信息网视频推荐位进行为期一周的曝光。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]视频训练营[/color][/size][/font][font='宋体'][size=16px][color=#262626]:邀您进入仪器视频拍摄训练营,不定期拍摄技巧分享,优先了解视频征集活动的最新动态通知,超多视频征集活动邀你瓜分超多大奖![/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#262626]加入视频训练营[/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#262626]微信instrument888或识别下方二维码[/color][/size][/font][/align][align=center][img]https://ng1.17img.cn/bbsfiles/images/2021/08/202108181514555568_5903_3237657_3.png[/img][/align][align=left][font='宋体'][size=16px][color=#333333]评分结果将在第一期活动结束后一周内公布到社区内。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#7030a0]作品分数=仪器信息网视频中心内部评审+外部专家评审+人气值[/color][/size][/font][font='宋体'][size=16px][color=#262626]。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]评分要求:[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]1. 内部评审:由仪器信息网视频中心内部评审,根据主题切合度、内容、创意、启发意义、画质和声音五项条件分别给出1-5分(满分25)。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]2. 外部评审:由外部专家评审团根据主题切合度、内容、创意、启发意义、画质和声音五项条件分别给出1-5分(满分25)。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]3. 人气值:在活动结束后选取点赞数量为前五名分别给出1-5分的人气值。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]4. 大于等于30分可以获得评选资格,根据最终得分高低评选奖项。[/color][/size][/font][/align][align=left][font='宋体'][size=16px][color=#262626]5.终极大奖将根据最终作品评分最终分数,给予奖励发放。[/color][/size][/font][/align][align=right][font='宋体'][size=12px][color=#262626]*最终解释权归仪器信息网所有[/color][/size][/font][/align][align=center][font='宋体'][size=16px][color=#262626]【此活动同样享受原创大赛奖励规则,点击下方了解详情】[/color][/size][/font][/align][align=center][img]https://ng1.17img.cn/bbsfiles/images/2021/08/202108181514555902_804_3237657_3.png[/img][/align]
[font=宋体, SimSun][size=18px]各相关单位: [/size][/font][font=宋体, SimSun][size=18px]根据《辽宁省生态学会团体标准管理办法》的相关规定,由辽宁省生态学会组织专家对《衰退樟子松固沙林无人机多光谱监测技术规程》团体标准进行了立项论证。经专家组评审,该项团体标准的申报材料符合团体标准立项条件,现批准立项。请起草单位严格按照相关要求抓紧组织实施,严把标准质量关,切实提高标准编制的质量和水平,增强标准的适用性和有效性。[/size][/font][font=宋体, SimSun][size=18px]特此公告。 [/size][/font][font=宋体, SimSun][size=18px]联系人:徐 爽 [/size][/font][font=宋体, SimSun][size=18px]联系电话:024-83978042 [/size][/font][font=宋体, SimSun][size=18px]联系邮箱:shuangyyya@iae.ac.cn [/size][/font][font=宋体, SimSun][size=18px]地址:辽宁省沈阳市沈河区文化路 72 号 [/size][/font][align=right][font=宋体, SimSun][size=18px]辽宁省生态学会[/size][/font][/align][align=right][font=宋体, SimSun][size=18px]2024年 4 月 7 日[/size][/font][/align][img]https://www.ttbz.org.cn/ueditor/dialogs/attachment/fileTypeImages/icon_pdf.gif[/img][url=https://www.ttbz.org.cn/upload/file/20240407/6384808124720464585256833.pdf]关于《衰退樟子松固沙林无人机多光谱监测技术规程》团体标准立项的公告.pdf[/url]

http://ng1.17img.cn/bbsfiles/images/2011/07/201107171108_305274_1609805_3.jpg首席研究员格雷戈里·帕克博士手拿一个小型有翼无人机,外形好似一只昆虫。美国军方的目标是研制外形类似鸟类和昆虫的微型飞行器

Agilent 8560E|HP-8560E 3G频谱分析仪 30Hz至2.9GHz品 牌:Agilent | 安捷伦 | 美国惠普 | HPhttp://ng1.17img.cn/bbsfiles/images/2016/11/201611151410_616477_0_3.jpg详细说明: HP8560E频谱分析仪·能从30Hz连接扫描到2.9,6.5,13.2,26.5,40或50GHz·分辨带宽1Hz至100Hz,数字式测量速度·低的相位噪声和大的动态范围·精密时基和1Hz计数器分辨率·邻近信道功率、信道功率、载波功率和选通视频测量标准·牢固耐用、符合3类标准·彩色屏幕·VGA输出产品信息:8560E 系列频谱分析仪 8560E系列便携式频谱分析仪具有通常在较大型且更昂贵的台式分析仪上才有的测量能力和性能。8560E系列把杰出的相位噪声、灵敏度、1Hz的分辨带宽和大的动态范围等功能组合在一个坚固的3类军用机箱中,从而使之能适应恶劣的环境条件。适用于RF通信的功能 对现今无线电话,寻呼机和其它发射机的邻近信道功率(ACP)进行测量的能力,是研制和生产过程中重要的一环。8560E系列频谱分析仪用如 NADA-TDMA、GSM、DET、CT2-CAI、PDC和PHS制式中所用的数字调制,对猝发载波信号的APC测试提供完整的解决方法。业已讨论过已建立的标准在执行中的许多困难,标准的实施提供快速、精确且便于使用的APC测量能力。利用8563E选件E35ACPR测试仪能以少为70dB 的动态范围测量W-CDMA邻近信道功率比(ACPR)。技术指标频率范围(内混频):8560E:30Hz~2.9GHz8561E:30Hz~6.5GHz8562E:30Hz~13.2GHz8563E:9kHz~26.5GHz;30Hz~26.5GHz(选件006)8564E:9kHz~40GHz;30Hz~40GHz(选件006)8565E:9kHz~50GHz;30Hz~50GHz(选件006)频率范围(外混频):18GHz~325GHz分12个波导频段(不能由8560E选件002提供) 标准的另一个特点是能测量从0.10%到99.99%的占用带宽。 定时选通信号分析是标准的另一个特点,它使对时变信号如脉冲RF信号、时分多址(TDMA)信号、交错信号和猝发调制信号的测量十分容易。85902A猝发载波触发器可以提供TTL触发信号。 8560E系列技术指标已经被提高了,现在还可以从这个高性能便携式频谱分析仪系列得到更好的相位噪声、灵敏度、动态范围和频率响应。 8562E频谱分析仪提供13.2GHz频率范围,增加了动态范围和三阶截获(TOI)的能力。这就使无线通信工程师能对猝发运行系统中的高性能元器件进行测试。 利用HP85672A寄生响应测量程序,用户可以用8560E系列频谱分析仪迅速、方便地进行寄生响应测试。快速数字分辨带宽 以数字方式实现1,3,10,30和100Hz分辨带宽,这使8560E系列频谱分析仪的扫描速度比用相当的模拟滤波器可能达到的扫描速度快 3~600倍。窄到5:1的波形因数允许很容易观察相靠近的低电平信号。数字带宽还为频谱分析仪提供完全的100dB屏幕上已校显示。用于8560系列的PC软件 新型AgilEntBEnchLink频谱分析仪PC软件可以在PC机与8560系列频谱分析仪之间建立便于使用的数据通信链路。通过充分利用 Windows界面,用户便很容易将屏幕图象或迹线数据经GBIB接口传送,从而可以在PC机上对测量结果进行获取、分析和记录。HP8560E频谱分析仪一般指标环境指标 指标:符合第3类牢固机箱标准 校准周期:2年(8560EC/61EC/62EC/63EC);1年(8564EC/65EC) 预热时间:在普通环境条件下为5分钟 温度:-10°~+55℃(工作时);-51°~+71℃(不工作时) 湿度:95%,在40℃条件下持续5天 防水性:在16升/小时/英尺2的雨量下不透水 高度:15000英尺(工作时);50000英尺(不工作时) 脉冲冲击(半正弦):30g,持续11ms 运输拖架:有6个面和8个拐角的8英寸拖架电磁兼容性:传导和辐射干扰符合CISPR Pub.11(1990)。除某些 指标外,均满足MIL-STD-461 C part4标准。电源要求 用115Vac工作:90~140V rms,3.2A rms max,47~440Hz 用230Vac 工作:180~250V rms,1.8Arms max,47~66Hz大功耗;180W(8560EC/61EC/62EC/63EC);260W(8564EC/65EC)声频噪音(额定值):在室温下,强度<5.0贝尔(ISODP 7779)尺寸(不带手把,支架,面罩):337mm(宽)×187mm(高)×461mm(长)重量(搬运重量,额定值):20kg选件002内置跟踪发生器(只用于8560EC)频率 范围:300KHz~2.9GHz 精度(取峰值之后):±(基准频率精度×调谐频率+5%×间隔 +295Hz) 跟踪漂移(额定值):5分钟预热之后,可用于1KHz RBW:30 分钟预防热之后,可用于300Hz RBW 小RBW:300Hz幅度 输出电平:-10~+1dBm;-10~2.8dBm(典型值) 分辨率:0.1dB 精度(25℃±10℃) 微调:±0.2dB/dB,±0.5dBmax 绝对精度:0.75dB 电平平坦度:±2.0dB 动态范围:95dB(300KHz~1MHz); 115dB(1MHz~2.0GHz); 110dB(2.0GHz~2.9GHz) 功率扫描:10dB范围,0.1dB分辨率输入/输出 RF输出(前面板):N型(阴),50Ω(额定) 外ALC输入(后面板):BNC(阴),与负向检波器一起使用
分不清示波器和频谱仪的区别的人常闹笑话,为避免尴尬,本文简单总结以下四点——用实时带宽、动态范围、灵敏度、功率测量准确度,比较示波器和频谱仪的分析性能指标,来区分两者。[b] 1 实时带宽[/b] 对于示波器来说,带宽通常是其测量频率范围。而频谱仪则有中频带宽、分辨带宽等带宽定义。这里,我们以能对信号进行实时分析的实时带宽作为讨论对象。 对于频谱仪来说,末级模拟中频的带宽通常可以作为其信号分析的实时带宽,大多数的频谱分析的实时带宽只有几兆赫兹,通常较宽的实时带宽通常为几十兆赫兹,当然目前带宽最宽的FSW频谱仪可以达到500兆赫兹。而示波器的实时带宽为其实时取样的有效模拟带宽,一般为数百兆赫兹,高的可达数千兆赫兹。 这里需要指出的是,大多数的示波器在垂直刻度设置不同时,其实时带宽可能并不一致,在垂直刻度设置到最灵敏时,其实时带宽通常会下降。 从实时带宽来说,示波器普遍优于频谱仪,这对于某些超宽带信号分析尤其有好处,特别是在调制分析上有着无可比拟的优势。[b] 2 动态范围[/b] 动态范围指标因其定义不同而有所不同,很多情况下,动态范围被描述为仪器测量最大信号和最小信号的电平差值。当改变测量设置时,仪器测量大信号和小信号的能力是不一样的,例如频谱分析仪在衰减设置不一样的情况下,其测量大信号所带来的失真是不一样的。在这里,我们讨论仪器能够同时测量大小信号的能力,即在不改变任何测量设置的情况下,示波器和频谱仪在合适设置情况下的最佳动态范围。 对于频谱仪来说,在不考虑相位噪声等近端噪声和杂散情况下,平均噪声电平、二阶失真、三阶失真是制约动态范围的最主要因素,以主流频谱仪的技术指标计算,其理想动态范围约为90dB(受二阶失真限制)。大多数的示波器由于受其AD有效取样位数和噪声底的限制,传统示波器的理想动态范围通常不超过50dB。(对于R&S RTO示波器,在100KHz RBW时,其动态范围可高达86dB) 从动态范围来看,频谱仪要优于示波器。但这里要指出的是,这对于常在信号的频谱分析来说确实如此,然而示波器的频谱是同一帧数据,频谱仪的频谱大多数情况下都不是同一帧数据,因而对于瞬变信号来说,频谱仪可能无法测量到。而示波器发现瞬变信号(信号满足动态范围的情况下)的概率要大得多。[b] 3 灵敏度[/b] 这里讨论的灵敏度,是指示波器和频谱仪所能测试到最小信号的水平。这个指标与仪器设置紧密相关。 对于示波器而言,示波器在Y轴设置至最灵敏档时,通常为1mV/div时示波器所能测试到最小信号,抛开端口不匹配等因素来看,示波器的信号通道产生的噪声以及轨迹不稳定带来的噪声是制约示波器灵敏度的最重要因素。 从图一中我们可以看出,因为采样点数的增加,频谱噪声底可以下降到比较理想的程度。然而,当在时域已经无法清晰准确的再现信号时,在频域就产生了非常多的杂波,这就限制了我们观测小信号的能力。[align=center][img=,501,263]http://ng1.17img.cn/bbsfiles/images/2017/12/201712081536_01_3345709_3.jpg!w501x263.jpg[/img][/align][align=center]图1 受噪声影响的的灵敏度限制[/align] 大多数示波器与图一所示一样,能够稳定测量0.2mV的信号,对应到频域,这相当于-60dBm的水平。事实上,示波器能否准确的测量小信号,不仅与垂直系统的灵敏度有关,还与X轴的抖动、触发灵敏度等性能有关。 笔者为了对比文中所分析的技术指标,特地到R&S公司成都的开放实验室(感谢成都分部提供的帮助)进行了指标对比,让人惊讶的是,RTO示波器在灵敏度指标上非常优秀,如下图所示:[align=center][img=,498,336]http://ng1.17img.cn/bbsfiles/images/2017/12/201712081537_01_3345709_3.jpg!w498x336.jpg[/img][/align][align=center]图2 RTO示波器的全频段频谱图[/align] 从图二可以看出,RTO能够准确测量-60dBm的信号,其噪声底在-80dBm左右。而最让人感到高兴的是,在整个频段(DC-4GHz),没有发现能够影响灵敏度的大的杂波,从而大幅提高了测量灵敏度。 在没有杂波的情况下,通过增加取样点数可以得到更低的噪声。例如图3所示,将Span和RBW设置得更小的情况下,RTO示波器的底噪声可以降低至-100dBm以下。[align=center][img=,502,337]http://ng1.17img.cn/bbsfiles/images/2017/12/201712081536_02_3345709_3.jpg!w502x337.jpg[/img][/align][align=center]图3 RTO示波器的窄带频谱图[/align] 从这点来说,RTO绝对能够让测量人员改变“示波器是频域分析鸡肋”的感受。 对于频谱仪来说,同样抛开端口不匹配等因素来讨论,频谱仪的在增益最大、衰减器设置最小情况下,平均噪声电平可以看作频谱仪测量小信号的极限。在不涉及前置放大器的情况下,大多数性能良好的频谱仪可以达到-150dBm。[b] 4 功率测量准确度[/b] 对于频域分析来说,功率测量准确度是非常重要的技术指标。无论是示波器还是频谱仪,对功率测量准确度的影响量都是非常多的,下面分别列出其主要的影响量: 对于示波器来说,功率测量准确度的影响量有:端口不匹配引起的反射、垂直系统误差、频率响应、AD量化误差、校准信号误差等。 对于频谱仪来说,功率测量准确度的影响量有:端口不匹配引起的反射、参考电平误差、衰减器误差、带宽转换误差、频率响应、校准信号误差等。 此处我们不对影响量进行逐一分析比较,我们通过对1GHz频率信号的进行功率测量来对比,通过RTO示波器和FSW频谱仪的测量对比可以看出,在1GHz处,示波器与频谱仪的功率测量值仅相差0.2dB左右,这是非常好的测量准确度指标。因为频谱仪在1GHz处的测量准确度是非常好的。 另外,在频率范围内,示波器的频率响应指标也是很好的,4GHz范围内不超过0.5dB,从这点来说,示波器甚至优于频谱仪的性能。 总的来说,示波器与频谱仪在频域分析性能上各有所长,频谱仪在灵敏度等技术指标上更胜一筹,示波器在实时带宽上较频谱仪更为出色。在测量不同类型的信号时,可根据测试需求和仪器的不同技术特点进行选择。
1) 频谱分析仪的校准:频谱分析仪一般都有固定幅度和频率的校准器,使用频谱分析仪测量信号特别绝对信号电平测量时,需要对频谱分析仪进行校准,以保证信号测量精度;另外,通过校准信号的测量,可以检查频谱分析仪是否有问题。2) 射频输入信号电平小于频谱分析仪允许的安全电平:在频谱分析仪输入端接入射频信号之间,一定要对输入信号电平进行正确估算,避免频谱分析仪射频输入大于频谱分析仪允许的安全电平,否则将会烧毁频谱分析仪输入衰减器和混频器。特别是在高功率信号测量中,要格外小心谨慎。例如用频谱分析仪测量1W以上高功率放大器时,注意在频谱分析仪输入端接衰减器,以使频谱分析仪的射频输入信号小于频谱分析仪允许的安全电平。3) 确定频谱分析仪是否允许直流信号输入:某些频谱分析仪不允许直流信号输入,因此注意测量信号是否包含直接成分。特别是在某些系统中,射频信号和直流信号用同一根电缆传输,此时要特别小心,信号接入频谱分析仪射频输入端口之前,一定在频谱分析仪输入端接隔直流器,以免损坏仪器。例如在很多卫星通信系统,低噪声放大器的直流加电线和射频信号传输采用同一根电缆,测量这样射频信号时,特别注意在频谱分析仪射频输入接隔直流器,保护频谱分析仪的射频输入电路。4) 低电平信号测量:频谱分析仪的灵敏度是指在特定带宽下,频谱分析仪测量小信号的能力。因此,在测量低电平信号时,特别是测量信号接近频谱分析仪本底噪声时,应减小频谱分析仪的射频衰减和分辨带宽,提高频谱分析仪的灵敏度,提高低电平信号的测量精度。另外减少视频带宽和采用视频平均技术,虽然不影响频谱分析仪的灵敏度,但可以改善小信号测量精度。5) 合理设置频谱分析仪参数:在测试射频信号时,合理设置频谱分析仪的分辨带宽、扫频带宽、视频带宽和扫描时间等,确保频谱分析仪CRT不出现测量不准的信号提示。当频谱分析仪CRT出现测量不准信息,此时测量无法保证测量精度。
[font=&][size=13px][color=#888888]*主要功能:自动化参数配置、数据采集和数据存储,软件自带数据库存储。[/color][/size][/font][font=&][size=13px][color=#888888]*程控对象:频谱分析仪。[/color][/size][/font][font=&][size=13px][color=#888888]*程控接口:具有GPIB、USB、RS232、LAN、RS485、TTL任意一种程控接口的频谱分析仪。[/color][/size][/font][font=&][size=13px][color=#888888]*仪器兼容性:系统兼容是德科技(KEYSIGHT)、普源精电(Rigol)、泰克(Tektronix)、横河(Yokogawa)等品牌。[/color][/size][/font] [b]1.软件概述[/b][font=微软雅黑, &][size=14px][font=Vrinda] [/font]NS-Analyzer 频谱分析仪程控软件是为了解决频谱分析仪测试操作流程繁琐、参数配置复杂等问题开发的一款自动化测试程控软件。软件通过对频谱分析仪的程序控制实现自动化参数配置、数据采集和数据存储,软件自带数据库存储,方便用户查询历史检测数据,最大限度提高仪器使用效率。[/size][/font][align=center][img=频谱仪程控.jpg]http://www.namisoft.com/UserFiles/Article/image/6374206815198000289032091.jpg[/img][/align] [b] 2.[b]软件[/b]特点[/b][font=微软雅黑, &][size=14px] 远程可以控制单台/多台仪器,采集参数、波形为全自动化。[/size][/font][font=微软雅黑, &][size=14px][font=Vrinda] [/font]软件自动保存测试时间、中心频率、扫频宽度、幅值、谐波数量等数据以及波形,方便随时查询。[/size][/font][font=微软雅黑, &][size=14px][font=Vrinda] [/font]兼容市面上所有具有GPIB、USB、RS232、LAN、RS485、TTL任意一种程控接口的频谱分析仪,如:是德科技(KEYSIGHT)、普源精电(Rigol)、泰克(Tektronix)横河(Yokogawa)等品牌。[/size][/font][font=微软雅黑, &][size=14px][font=Vrinda] [/font]自动生成采集报告,用户可自主选择数据、选择路径。[/size][/font][font=Vrinda][size=14px] [/size][/font][font=微软雅黑, &][size=14px]操作方便简单,提高效率,即使对不懂仪器的用户来说也可直接用该系统控制仪器[/size]。[/font][font=微软雅黑, &][/font][font=微软雅黑, &] [size=14px][b] 3.兼容仪器[/b][/size][/font][align=center][img=频谱分析仪兼容仪器.png]http://www.namisoft.com/UserFiles/Article/image/6374027512199983563100617.png[/img][/align][font=微软雅黑, &][size=14px][b][/b][/size][/font][font=微软雅黑, &][size=14px][b][/b][/size][/font][font=微软雅黑, &][size=14px][b] 4.软件流程图[/b][/size][/font][font=微软雅黑, &][size=14px][b][/b][/size][/font][align=center][img=频谱分析仪二次开发软件流程图.png]http://www.namisoft.com/UserFiles/Article/image/6371167402425024491302642.png[/img][/align][font=微软雅黑, &][size=14px][b] [/b][/size][/font] [b] 5.[b]软件[/b]界面 [/b][font=微软雅黑, &][size=14px][b][/b][/size][/font][align=center][img=频谱分析仪Labview二次开发软件界面.png]http://www.namisoft.com/UserFiles/Article/image/6373829616154671068537872.png[/img][/align]如果您想要免费试用软件,请搜索 【纳米软件】至官网试用。http://www.namisoft.com/Softwarecenterdetail/605.html
在推销频谱分析仪时,因为实时频谱分析仪能显示周期性杂散波的瞬时反应,所以比别的仪器贵。除此之外它还有哪些优点呢?另外,我想知道根据它的频率怎么得出一个声压级的值?因为不知道这个在哪里问,只好发到这里。。。新手等各位解答[em45]
设备名称: 型号 类别 型号 类别 E4406A 发射机测试仪 68347C 信号源 HP83752 信号源 54147A 网络分析仪及配件 D3000A 信号源 HP8752C 网络分析仪及配件 R3765 网络分析仪及配件 R3131 频谱分析仪 MG3670B 信号源 HP8594E 频谱分析仪 HP8753D 网络分析仪及配件 HP8720D 网络分析仪及配件 HP8510B 网络分析仪及配件 HP8561E 频谱分析仪 HP8563E 频谱分析仪 MS8604A 频谱分析仪 HP8648C 信号源 E4418A 功率计 MT8801C 无线通信测试仪 HP8510C 网络分析仪及配件 89441A 其它 E4436B 信号源 53132A 通用仪器 R3767CH 网络分析仪及配件 37247C 网络分析仪及配件 R3767CG 网络分析仪及配件 R3765BH 网络分析仪及配件 R3267 频谱分析仪 频谱分析仪/噪声仪/网络分析仪及配件/功率计/信号源 发射机测试仪/无线通信测试仪 其它/通用仪器 租 赁 商 品 型号 类别 HP8753D 网络分析仪及配件 R3765BH 网络分析仪及配件 公 司 简 介 美国易克来博(ELECTROLAB)电子测量仪器公司位于科技前沿阵地─硅谷,于1993年成立。 公司定位:及时向业界提供重新检修的电子测试仪器的公司。 主要产品:以HP、TEK、ADVANTEST、ANRITSU 等著名品牌的射频、微波、通讯测试仪器为主,始终坚持严格的质量标准,所有仪器均按原厂指标校验 公司承诺:交货迅速、品质可靠、价格合理、服务一流! 更多访问: http://www.electrolab.com.cn/
无处不在的噪声是射频和微波设计师的敌人,对此不应感到惊奇。噪声限制了通信接收器检测弱信号的能力,从而妨碍设计师实现最佳的接收器性能。传输信号中的噪声恶化了性能,不仅是对传输信号,而且同样是对周围的频谱。由于噪声是普遍存在的,多年以前,射频和微波行业就建立了一个称为噪声系数的测量参数,以定量元件或系统给通过它的信号增加了多少噪声。 虽然噪声系数是一种用于描述射频和微波系统噪声和接收器灵敏度的参数,但它也是最重要和广泛使用的参数。对于各次测量和使用不同仪器的测量,噪声系数测量总是要求高精度和重复性。精度和重复性保证了元件和子系统制造商和他们的客户所进行规定性能测量的一致性。 噪声系数基础作为测量参数的噪声系数早在二十世纪四时年代就开始使用,工程师Harold Friis把它定义为用分贝(dB)表示的射频或微波器件输入处的信噪比(SNR)除以输出处的SNR。从它的名称可知,SNR是在给定传输环境中的信号电平与噪声电平之比。SNR越高,就有越多的信号超过噪声,使信号更容易检测。因此噪声系数是越低越好,因为在理想情况下,微波元件、子系统或系统应没有噪声施加到通过的信号上。但实际上所有电子器件都会增加一些噪声,叠加最低噪声的是最好的器件,这些器件有最低的噪声系数。 噪声系数的重要性有多高?不管如何估计噪声系数对系统整体性能和成本的重要性都不会过高。例如,把直播卫星的噪声系数降一半,即从2dB降到1dB,与把卫星转发器的功率增加25%在性能上有相同的效果。显然,制造商会发现增加空间发射机功率的成本要远远高于改进地面站接收器低噪声放大器(LNA)性能。 在卫星接收器生产线中,只需调整阻抗电平或选择适合的晶体管,就能把噪声系数降低1dB。1dB噪声系数的降低与增加天线25%的面积有同样效果。增加天线尺寸也增加了成本,加大了操纵和支持机构的体积和重量,对于有美学考虑的DBS这类应用,这样的天线是太大了。 在无线通信系统中,具有低噪声系数的基站可减小与之通信的移动台发射功率,这对于电池寿命,大小和重量都有积极的影响。 在发射机设计中噪声也极为重要。例如,无线基站线性功率放大器中过高的噪声会降低邻道接收质量,也就是达不到规章对干扰的要求。 进行噪声系数测量有几种技术和仪器可用于噪声系数的测量,从专用噪声系数分析仪到频谱分析仪,网络分析仪和真有效值功率计。如所预期的,专用的噪声系数分析仪提供最低的测量不确定度,其次是频谱分析仪(如果配备前置放大器)。Agilent ESA-E系列经济型频谱分析仪带有可选的集成前置放大器(选件1DS),可根据分析仪的频率范围提供10MHz至1.5GHz或3GHz的噪声系数测量。Agilent ESA-E系列频谱分析仪是PSA系列高性能频谱分析仪和 Agilent NFA系列噪声系数分析仪的补充。如果您的应用只需要中等性能的频谱分析工具,它就是最物美价廉的解决方案。过去使用频谱分析仪测量噪声系数需要许多步骤和若干数学计算,这是繁杂和容易出错的过程。现在,ESA-E系列新的噪声系数测量专用件实现了包括计算在内的整个过程自动化。这是非常精确和易于使用的解决方案。新的测量专用件是频谱分析仪丰富通用能力环境的集成部分,包括单键功率测量,以及与8?601A VSA软件链接的相位和调制分析。若要求更高的频谱分析能力和优异的仪器不确定度,用户可选择PSA系列频谱分析仪。PSA有您期望于高性能频谱分析仪的所有功能,以及与ESA-E系列同一用户界面的噪声系数测量专用件。因此,客户能无缝地从一种仪器转到下一种仪器,而不必担心还要去熟悉仪器间的细微差别。ESA- E系列和PSA系列频谱分析仪的用户可能会认为不再需要专用的噪声系数分析仪。但所有这三种仪器都有各自适应的环境。频谱分析仪是设计师手中最常用和功能最全的测量工具,几乎在每一张测试台上都能找到它。例如可首先定位寄生信号,然后测量器件在无干扰噪声测量频率处的噪声系数。这样,带噪声系数测量专用件的ESA-E系列就成为要以经济价格得到众多测量能力设计师的理想解决方案。这是业内最灵活的频谱分析仪,它带有插卡箱结构,完全适应对定制能力的要求。PSA系列是灵活性、速度、精度和动态范围的优异组合,可提供最先进的频谱分析功能。而噪声系数分析仪是完全针对应用的仪器,仅用于测量噪声系数、增益和相关量。与频谱分析仪及其它仪器相比,噪声系数分析仪更快,更易用、精度更高、频率范围更宽。因此是得到所可能最好不确定度的最高端的选择,特别是对于3GHz以上频率。在给出达26.5GHz全部性能指标的仪器中,最快和最精确的仪器是Agilent NFA系列噪声系数分析仪。
造成频谱泄露的原因在于傅里叶变换的输入信号不能准确的、完整的代表被分析信号,输出产生的一种误差,这种误差可以通过加合适的窗函数或延长时间窗得以改善,当输入信号的不完整性达到一定程度,输出是一种错误的结果。 对于周期信号,整周期截断是不发生频谱泄露的充分且必要条件,抑制频谱泄露应该从源头抓起,尽可能进行整周期截断。 这一点,从相关标准的规定也可以得到佐证。电能质量相关的IEC标准(IEC61000-4-7)和国家标准都明确规定,谐波测量仪器的傅里叶时间窗为10个基波周期,且采用矩形窗。即:标准强调通过提高仪器的同步性减小频谱泄露,而不推荐采用各种效果不可控的窗函数抑制频谱泄露。 WP4000变频功率分析仪通过频率测量和同步电路,保证了信号的整周期截断,傅里叶时间窗包含一个或整数个信号周期,有效的避免了频谱泄露。银河电气为您提供值得信赖的数据!
[font=&][size=13px][color=#888888]*主要功能:自动化参数配置、数据采集和数据存储,软件自带数据库存储。[/color][/size][/font][font=&][size=13px][color=#888888]*程控对象:频谱分析仪。[/color][/size][/font][font=&][size=13px][color=#888888]*程控接口:具有GPIB、USB、RS232、LAN、RS485、TTL任意一种程控接口的频谱分析仪。[/color][/size][/font][font=&][size=13px][color=#888888]*仪器兼容性:系统兼容是德科技(KEYSIGHT)、普源精电(Rigol)、泰克(Tektronix)、横河(Yokogawa)等品牌。[/color][/size][/font] [b]1.软件概述[/b][font=微软雅黑, &][size=14px][font=Vrinda] [/font]NS-Analyzer 频谱分析仪程控软件是为了解决频谱分析仪测试操作流程繁琐、参数配置复杂等问题开发的一款自动化测试程控软件。软件通过对频谱分析仪的程序控制实现自动化参数配置、数据采集和数据存储,软件自带数据库存储,方便用户查询历史检测数据,最大限度提高仪器使用效率。[/size][/font][align=center][img=频谱仪程控.jpg]http://www.namisoft.com/UserFiles/Article/image/6374206815198000289032091.jpg[/img][/align] [b] 2.[b]软件[/b]特点[/b][font=微软雅黑, &][size=14px] 远程可以控制单台/多台仪器,采集参数、波形为全自动化。[/size][/font][font=微软雅黑, &][size=14px][font=Vrinda] [/font]软件自动保存测试时间、中心频率、扫频宽度、幅值、谐波数量等数据以及波形,方便随时查询。[/size][/font][font=微软雅黑, &][size=14px][font=Vrinda] [/font]兼容市面上所有具有GPIB、USB、RS232、LAN、RS485、TTL任意一种程控接口的频谱分析仪,如:是德科技(KEYSIGHT)、普源精电(Rigol)、泰克(Tektronix)横河(Yokogawa)等品牌。[/size][/font][font=微软雅黑, &][size=14px][font=Vrinda] [/font]自动生成采集报告,用户可自主选择数据、选择路径。[/size][/font][font=Vrinda][size=14px] [/size][/font][font=微软雅黑, &][size=14px]操作方便简单,提高效率,即使对不懂仪器的用户来说也可直接用该系统控制仪器[/size]。[/font][font=微软雅黑, &][/font][font=微软雅黑, &] [size=14px][b] 3.兼容仪器[/b][/size][/font][align=center][img=频谱分析仪兼容仪器.png]http://www.namisoft.com/UserFiles/Article/image/6374027512199983563100617.png[/img][/align][font=微软雅黑, &][size=14px][b][/b][/size][/font][font=微软雅黑, &][size=14px][b][/b][/size][/font][font=微软雅黑, &][size=14px][b] 4.软件流程图[/b][/size][/font][font=微软雅黑, &][size=14px][b][/b][/size][/font][align=center][img=频谱分析仪二次开发软件流程图.png]http://www.namisoft.com/UserFiles/Article/image/6371167402425024491302642.png[/img][/align][font=微软雅黑, &][size=14px][b] [/b][/size][/font] [b] 5.[b]软件[/b]界面 [/b][font=微软雅黑, &][size=14px][b][/b][/size][/font][align=center][img=频谱分析仪Labview二次开发软件界面.png]http://www.namisoft.com/UserFiles/Article/image/6373829616154671068537872.png[/img][/align]如果您想要免费试用软件,请搜索 【纳米软件】至官网试用。http://www.namisoft.com/Softwarecenterdetail/605.html
频谱分析仪是一种常用的[url=http://www.d117w.com]电子测试测量仪器[/url],主要用于射频和微波信号的检测,在许多领域有一定的应用。频谱分析仪的功能相对比较强大,初学者在使用光谱仪方面有一些常见的问题需要用户的注意,在使用频谱分析仪测试容易进入一些误区和疑惑。今天的小编向大家介绍[url=http://www.d117w.com/xwzx/cjwt/539.html][b]频谱分析仪使用的常见六大问题[/b][/url]。[align=center][img=频谱分析仪]http://www.d117w.com/uploads/171223/1-1G223145I3913.jpg[/img][/align][b] 频谱分析仪六大常见问题解答[/b] Q1:如何设置频谱仪最佳的灵敏度观察微弱信号 A:首先根据被测小信号的大小设置相应的中心频率、扫宽(span)以及参考电平 然后在频谱分析仪没有出现过载提示的情况下逐步降低衰减值 如果此时被测小信号的信噪比小于15db,就逐步减小rbw,rbw越小,频谱分析仪的底噪越低,灵敏度就越高。 如果频谱分析仪有预放,打开预放。预放开,可以提高频谱分析仪的噪声系数,从而提高了灵敏度。对于信噪比不高的小信号,可以减少vbw或者采用轨迹平均,平滑噪声,减小波动。 需要注意的是,频谱仪测量结果是外部输入信号和频谱分析仪内部噪声之和,要使测量结果准确,通常要求信噪比大于20db。 Q2:分辨率带宽(rbw)是不是越小越好? A:rbw越小,频谱分析仪灵敏度就越好,但是,扫描速度会变慢。最好根据实际测试需求设rbw,在灵敏度和速度之间找到平衡点-既保证准确测量信号又可以得到快速的测量速度。 Q3:平均检波方式(averagetype)如何选择:power?logpower?voltage? logpower对数功率平均:又称videoaveraging,这种平均方式具有最低的底噪,适合于低电平连续波信号测试。但对”类噪声“信号会有一定的误差,比如宽带调制信号w-cdma等。 功率平均:又称rms平均,这种平均方式适合于“类噪声“信号(如:cdma)总功率测量。 电压平均:这种平均方式适合于观测调幅信号或者脉冲调制信号的上升和下降时间测量。 Q4:扫描模式的选择:sweep还是fft? A:现代频谱仪的扫描模式通常都具有sweep模式和fft模式。通常在比较窄的rbw设置时,fft比sweep更具有速度优势,但在较宽rbw的条件下,sweep模式更快。 当扫宽小于fft的分析带宽时,fft模式可以测量瞬态信号 在扫宽超出频谱分析仪的fft分析带宽时,如果采用fft扫描模式,工作方式是对信号进行分段处理,段与段之间在时间上存在不连续性,则可能在信号采样间隙时,丢失有用信号,频谱分析就会存在失真。这种类型信号包括:脉冲信号,tdma信号,fsk调制信号等。 Q5:检波器的选择对测量结果的影响? peak检波方式:选取每个bucket中的最大值作为测量值。这种检波方式适合连续波信号及信号搜索测试。 sample检波方式:这种检波方式通常适用于噪声和“类噪声”信号的测试。 negpeak检波方式:适合于小信号测试,例如,emc测试。 normal检波方式:适合于同时观察信号和噪声。 Q6:跟踪源(tg)的作用是什么? A:跟踪源是频谱分析仪上的常见选件之一。当跟踪源输出经被测件的输入端口,而此器件的输出则接到频谱仪的输入端口时,频谱仪以及跟踪源形成了一个完整的自适应扫频测量系统。跟踪源输出的信号的频率能精确地跟踪频谱分析仪的调谐频率。频谱仪配搭跟踪源选件,可以用作简易的标量网络分析,观测被测件的激励响应特性曲线,例如:器件的频率响应、插入损耗等。 以上给大家解答了一些关于频谱分析仪在使用过程中经常遇到的一些问题,遇到这些问题可以根据频谱分析仪工作原理来分析。通过对于频谱分析仪的常见问题的了解,在对于频谱分析仪的使用可加深了解,能够更快的提高效率。







 我要推广仪器
我要推广仪器
 下载APP
下载APP