“黑灯实验室”里,你的同事是个机器人
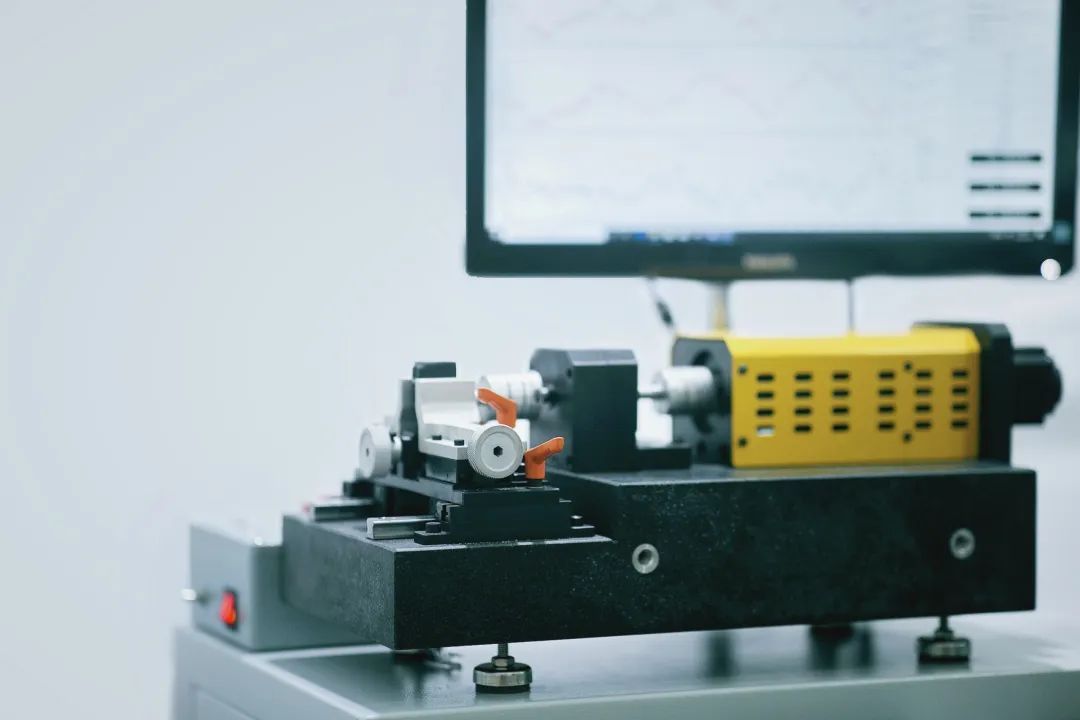
p style="text-indent: 2em "span style="color: rgb(63, 63, 63) text-indent: 2em font-family: 微软雅黑 "也许有一天,论文的作者栏里会有“擎天柱”之类的署名,不要惊讶,那是一位机器人研究员。/span/pp style="text-align: center text-indent: 0em "span style="color: rgb(63, 63, 63) text-indent: 2em font-family: 楷体, 楷体_GB2312, SimKai "点击查看视频,看看未来你的机器人同事/span/pscript src="https://p.bokecc.com/player?vid=DF875760E09F8CA59C33DC5901307461&siteid=D9180EE599D5BD46&autoStart=false&width=600&height=490&playerid=621F7722C6B7BD4E&playertype=1" type="text/javascript"/scriptp style="text-indent: 0em "span style="color: rgb(63, 63, 63) text-indent: 2em font-family: 楷体, 楷体_GB2312, SimKai "br//span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) text-indent: 2em font-family: 微软雅黑 "近日,一个英国研究组指出,经过改造,汽车装配线上常见的机器人可以在化学实验室内和人类一起工作。该机器人和机器学习算法相连,能在给定需要检验什么假设的情况下,选择应该开展何种实验。/span/pp style="text-indent: 0em text-align: center "span style="color: rgb(63, 63, 63) text-indent: 2em font-family: 微软雅黑 "img style="max-width:100% max-height:100% " src="https://img1.17img.cn/17img/images/202008/noimg/b5e1280b-64be-493c-839c-d159c031a29f.gif" title="实验室机器人.gif" alt="实验室机器人.gif"//span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "在学术和工业研究实验室内,自动化学装置正变得越来越普遍,它们与流线分析和决策结合起来,实现了一定程度的自主性。但是,参与化学研究的机器人是定制的,要求有适用于实验室设备和分析仪器的专门接口,或者只供机器人使用的专门仪器。/span/pp style="text-indent: 0em text-align: center "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "img style="max-width:100% max-height:100% " src="https://img1.17img.cn/17img/images/202008/noimg/3f4606d3-483e-4cf9-b62a-d4cba235ef0f.gif" title="实验室机器人 (1).gif" alt="实验室机器人 (1).gif"//span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "利物浦大学的Andrew Cooper及同事,描述了一种经过改造的机器人,它可以使用和人类化学家一样的标准分析仪器,这相当于让研究者而非仪器变得自动化。/span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "该机器人采用激光扫描和触觉反馈相结合的方式实现定位,而且没有采用视觉系统。因此,它可以在完全黑暗的环境下操作,这有助于进行光敏光化学反应。/span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "机器人的尺寸和人类相当,可以在传统无改造的实验室内工作。不同于许多只能配发液体的自动化系统,这个机器人能以较高的准确性和可重复性,配发固体和液体,扩大了其在材料研究中的实用性。/span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "研究人员还通过编程方式,让机器人探索各种假设,以提高一种聚合光催化剂的性能。机器人在2~3天内便优化了反应条件,而人类预计要几个月才能完成。/span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "他们认为,可以在传统实验室内使用这个机器人解决大量不限于光催化的研究问题。/span/pp style="text-indent: 2em "span style="color: rgb(63, 63, 63) font-family: 微软雅黑 "7月8日,相关论文发表于《自然》。/span/pp style="text-indent: 2em text-align: right "span style="color:#3f3f3f font-family:微软雅黑"span style="font-family: 楷体, 楷体_GB2312, SimKai "本文根据nature、科学网综合整理。/span/span/p

























 我要推广仪器
我要推广仪器
 下载APP
下载APP