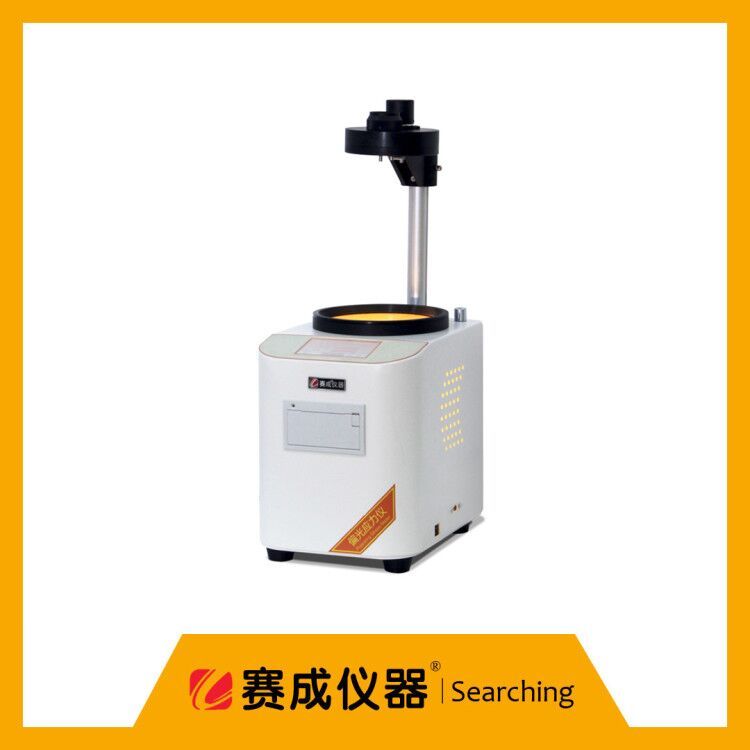
赛成发布触摸屏偏光应力仪新品
一、触摸屏偏光应力仪产品简介YLY-H偏光应力仪(玻璃制品应力检查仪)是应用偏振光干涉原理检查玻璃的内应力或晶体双折射效应的仪器。执行 YYB003320O2、 YBBO○ 162003标 准。由于仪器备有灵敏色片,并应用1/4波片补偿方法,因此本仪器不仅可以根据偏振场中的干涉色序,定性或半定量的测量玻璃的内应力,还可以准确定量的测量出玻璃内应力的等级。本仪器适含光学仪器厂、玻璃制晶厂、 实验室作测量光学玻璃、 玻璃制晶及其它光学材料的应力值,二、触摸屏偏光应力仪产品特点l 定性、 定量两种试验模式, 试验空间可调,适用范围广l 仪器可存储200组数据,每组数据 50个测量值l 采用高精度jue对式角度编码器进行测量,测量精度优于2.0nml 触摸屏显示,可同时显示测量角度及光程差数值,用户可直观获得所需数据,使测量直观易读。l 暗视场无需校准,采用了jue对式编码器,偏振场的暗视场总是处于零角度点,因此无需用户校对零点,避免了人为校对暗视场造成的误差。l 绿色节能,采用了更加节能环保的LED光源,相对传统光源节能80%以上。l 配备微型打印机,方便打印输出试验数据l 配备USB接口,可接PC软件控制仪器运行l 自动保存历史试验记录,本地查询,并可导出至电脑端EXCEL格式保存l 触屏端操作用户三级权限设置,完全满足GMP权限认证l 测试记录审计、追踪功能l 试验结果同步上传至云端服务器保存,在世界各地,有网络就可浏览。l 本地数据与云端数据双重备份,确保数据不会丢失三、技术指标项目特点仪器示值0.1毫微米测量精度2毫微米偏振场直径150亳米捡偏振片旋转角度-180 ~+180度数据保存200组每组数据50个测量值光场边沿亮度120cd/m2可调测量距离范围280mm外形尺寸220mm(L)×350mm(B)×580mm(H)净重12Kg电源AC 220V 50Hz使用环境温度10—40 oC创新点:YLY-H偏光应力仪(玻璃制品应力检查仪)是应用偏振光干涉原理检查玻璃的内应力或晶体双折射效应的仪器。执行 YYB003320O2、 YBBO○ 162003标 准。由于仪器备有灵敏色片,并应用1/4波片补偿方法,因此本仪器不仅可以根据偏振场中的干涉色序,定性或半定量的测量玻璃的内应力,还可以准确定量的测量出玻璃内应力的等级。本仪器适含光学仪器厂、玻璃制晶厂、 实验室作测量光学玻璃、 玻璃制晶及其它光学材料的应力值,



















 我要推广仪器
我要推广仪器
 下载APP
下载APP