推荐厂家
暂无
暂无
 400-878-6829
400-878-6829
 留言咨询
400-860-5168转3750
留言咨询
400-633-0963
留言咨询
留言咨询
400-860-5168转3750
留言咨询
400-633-0963
留言咨询
 400-895-0897
留言咨询
400-895-0897
留言咨询
 400-895-0897
留言咨询
400-895-0897
留言咨询
 留言咨询
留言咨询





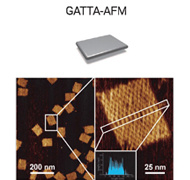
原子力显微镜 原子力显微镜 atomic force microscope 一种可用来研究包括绝缘体在内的固体材料表面结构的分析仪器。它通过检测待测样品表面和一个微型力敏感元件之间的极微弱的原子间相互作用力来研究物质的表面结构及性质。将一对微弱力极端敏感的微悬臂一端固定,另一端的微小针尖接近样品,这时它将与其相互作用,作用力将使得微悬臂发生形变或运动状态发生变化。扫描样品时,利用传感器检测这些变化,就可获得作用力分布信息,从而以纳米级分辨率获得表面结构信息。它主要由带针尖的微悬臂 、微悬臂运动检测装置、监控其运动的反馈回路、使样品进行扫描的压电陶瓷扫描器件、计算机控制的图像采集、显示及处理系统组成。微悬臂运动可用如隧道电流检测等电学方法或光束偏转法、干涉法等光学方法检测,当针尖与样品充分接近相互之间存在短程相互斥力时,检测该斥力可获得表面原子级分辨图像,一般情况下分辨率也在纳米级水平。AFM测量对样品无特殊要求,可测量固体表面、吸附体系等。 原子力显微镜:是一种利用原子,分子间的相互作用力来观察物体表面微观形貌的新型实验技术.它有一根纳米级的探针,被固定在可灵敏操控的微米级弹性悬臂上.当探针很靠近样品时,其顶端的原子与样品表面原子间的作用力会使悬臂弯曲,偏离原来的位置.根据扫描样品时探针的偏离量或振动频率重建三维图像.就能间接获得样品表面的形貌或原子成分. 优点与缺点 相对于扫描电子显微镜,原子力显微镜具有许多优点。不同于电子显微镜只能提供二维图像,AFM提供真正的三维表面图。同时,AFM不需要对样品的任何特殊处理,如镀铜或碳,这种处理对样品会造成不可逆转的伤害。第三,电子显微镜需要运行在高真空条件下,原子力显微镜在常压下甚至在液体环境下都可以良好工作。这样可以用来研究生物宏观分子,甚至活的生物组织。 和扫描电子显微镜(SEM)相比,AFM的缺点在于成像范围太小,速度慢,受探头的影响太大。[~116643~][~116644~][img]http://ng1.17img.cn/bbsfiles/images/2017/01/201701191651_624039_1602049_3.jpg[/img]
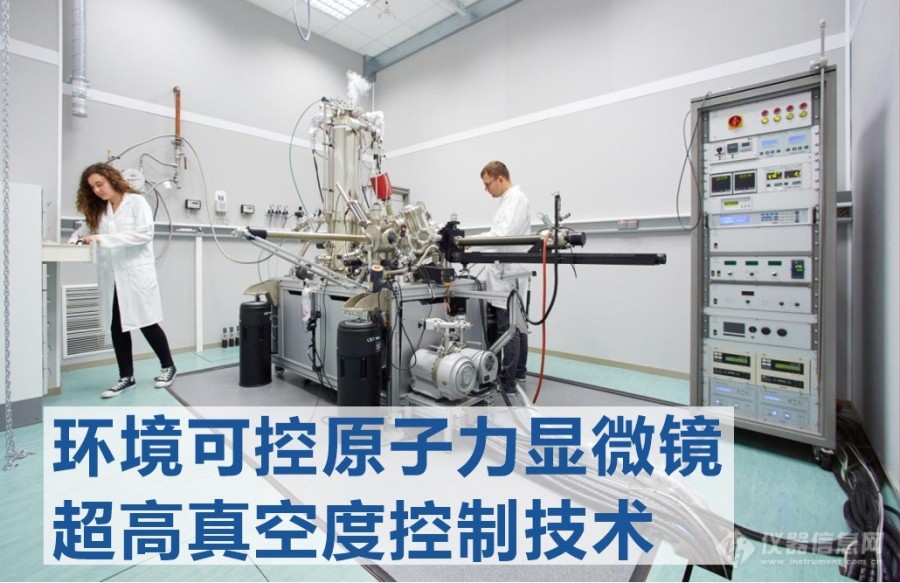
[align=center][size=16px] [img=常压原子力显微镜实现从超高真空到1bar的可变压力精密控制解决方案,690,446]https://ng1.17img.cn/bbsfiles/images/2023/10/202310111648213082_8409_3221506_3.jpg!w690x446.jpg[/img][/size][/align][size=16px][color=#000099][b]摘要:针对原子力显微镜对真空度和气氛环境精密控制要求,本文提出了精密控制解决方案。解决方案基于闭环动态平衡法,在低真空控制时采用恒定进气流量并调节排气流量的方法,在高真空和超高真空控制时则采用恒定排气流量并调节进气流量的方法。原子力显微镜真空度控制系统主要由高速电控针阀、电动可变泄漏阀、高速电控球阀、电容真空计、电离真空计和超高精度PID调节器构成,在超高真空至一个大气压范围内可达到很高的控制精度。[/b][/color][/size][align=center][size=16px][color=#000099][b]=================[/b][/color][/size][/align][size=18px][color=#000099][b]1. 问题的提出[/b][/color][/size][size=16px] 环境可控型原子力显微镜(AFM)是一种可以选择真空环境、气氛环境、液体环境以及变温环境等不同工作环境,并基于检测被测样品与探针之间的弱相互作用来研究包括材料表面形貌和物理化学性质的精密仪器。原子力显微镜要具备真空和气氛环境功能,主要出于以下应用需求:[/size][size=16px] (1)众所周知,原子之间的相互作用力非常微小的,AFM在工作时,为了维持两者之间的作用力,探针和样品之间的距离非常近,通常只有几个纳米或几十个纳米,这就对仪器周围环境的要求非常之高。目前市场上的原子力显微镜都是在普通空气环境中进行操作,但由于空气中活跃着各种气体分子、存在各种机械振动以及电磁干扰的缘故,要想获得极高的分辨率还是比较困难的,要想利用原子力显微镜真正获得原子级别的分辨率,还是需要在真空和超高真空环境下进行工作。[/size][size=16px] (2)随着微纳尺度下研究的逐步深入,在诸多研究中,需要在真空环境或者同一气氛环境(如氮气、氧气、湿度以及酒精蒸汽等)中,对样品表面同一实验区域原位开展多种不同的探测实验(如摩擦能量耗散测量,需要在不破坏工作环境的前提下更换其他具有不同功能的探针,实现原位探测)。 [/size][size=16px] (3)在有些微纳尺度研究中,不同真空度和不同气氛下的力谱测量结果显示AFM针尖和所研究材料之间的粘附力显著依赖于所暴露的真空压力和气体。[/size][size=16px] 总之,为了使原子力显微镜具有环境可控功能,关键是解决原子力显微镜的真空度和环境气氛精密控制问题,为此本文提出以下解决方案。[/size][size=18px][color=#000099][b]2. 解决方案[/b][/color][/size][size=16px] 解决方案的基本思路是在采用多个进气管路来选择具体工作气体的基础上,采用了两种技术途径来改变和精密控制原子力显微镜内的真空度。[/size][size=16px][color=#000099][b]2.1 回填技术[/b][/color][/size][size=16px] 在文献1所报道的如图1所示的环境压力原子力显微镜中,采用的就是回填技术,即先对环境压力腔室抽真空至超高真空度,然后通过泄漏阀的调节向环境压力腔室内回填所需的工作气体,使腔室内的压力达到所需的真空度。整个真空回填系统结构如图2所示。[/size][align=center][size=16px][color=#000099][b][img=带有制备室和环境压力室的超高真空度原子力显微镜,690,485]https://ng1.17img.cn/bbsfiles/images/2023/10/202310111651309750_3730_3221506_3.jpg!w690x485.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#000099][b]图1 带有制备室和环境压力室的超高真空度原子力显微镜[/b][/color][/size][/align][align=center][size=16px][color=#000099][b][img=原子力显微镜真空压力回填系统结构示意图,550,361]https://ng1.17img.cn/bbsfiles/images/2023/10/202310111651565751_1942_3221506_3.jpg!w460x302.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#000099][b]图2 原子力显微镜真空压力回填系统结构示意图[/b][/color][/size][/align][size=16px] 如图2所示,回填系统主要由以下几部分构成:(1)涡轮分子泵、(2)旋转低真空泵、(3)一氧化碳气体管线的碳过滤器、(4)压力计、(5)冷阱、(6)AP室气体计量的泄漏阀和(7)AP室初始排空闸阀。[/size][size=16px] 环境压力室真空压力范围为超高真空1×10[sup]-7[/sup]mBar~1Bar,在打开泄漏阀之前,环境压力室与准备室和离子泵隔离。由于真空室压力最高可达1巴,因此关闭离子压力计,使用全量程压力计(冷阴极压力计和对流压力计的组合)监控压力。[/size][size=16px] 从图2可以看出,在文献1所描述气体回填系统是一个真空压力的开环控制系统,我们分析此真空度控制系统并未进行更详细的描述,甚至可能根本无法真正实现文中所述的从超高真空度到一个大气压的1%精度内的准确控制,主要原因如下:[/size][size=16px] (1)首先,文献1中所采用的真空度传感器是超高真空用离子压力计和全量程压力计(冷阴极压力计和对流压力计的组合),这些真空计本身的精度就无法达到1%以内的测量精度。[/size][size=16px] (2)文献1采用了调节泄漏阀的开环控制形式向AFM环境压力腔内回填气体来进行真空度调节,根本就无法做到实施的反馈控制,关闭泄漏阀后,腔体自身漏率的存在一定会使腔内压力逐渐回升,这种回升在超高真空度范围内会非常明显,会明显影响超高真空度的稳定性。[/size][size=16px] (3)泄漏阀是一种漏率极低的调节阀门,其微小的进气流量仅适合10[sup]-3[/sup]~10[sup]-10[/sup]mBar范围内的高真空和超高真空度调节。对于10[sup]-3[/sup]mBar~1Bar的低真空控制,泄漏阀的作用非常有限,或者需要非常长的进气时间才能达到所需真空度,因此对于低真空范围内的进气控制,一般都会采用进气流量较大的针阀。[/size][size=16px][color=#000099][b]2.2 闭环控制和不同流量阀技术[/b][/color][/size][size=16px] 针对上述文献1中所用的回填技术存在的问题,本文提出的解决方案将逐项予以解决,一方面采用闭环控制技术,即由真空计、电动进气流量调节阀和真空压力PID控制器过程闭环控制回路,对所设定的不同真空度进行准确控制。另一方面是针对不同的真空度范围,分别采用了微小进气流量的电动可变泄漏阀和较大流量的电动针阀。由此构成的真空控制系统结构如图3所示。[/size][align=center][size=16px][color=#000099][b][img=原子力显微镜真空压力闭环控制系统结构示意图,690,364]https://ng1.17img.cn/bbsfiles/images/2023/10/202310111652283772_3144_3221506_3.jpg!w690x364.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#000099][b]图3 原子力显微镜真空压力闭环控制系统结构示意图[/b][/color][/size][/align][size=16px] 如图3所示,整个真空压力闭环控制系统分为以下四条气体管路,各自功能如下:[/size][size=16px] 抽气管路:抽气管路主要由电动球阀、干泵和分子泵组成,其中干泵和分子泵的作用是提供相应的真空源,而电动球阀则是用于调节使用干泵时管道内的抽气速率。[/size][size=16px] 大流量进气管路:大流量进气管路主要由电动针阀组成,其作用是以较大的流量形式调节腔体的进气流量。[/size][size=16px] 微小流量进气管路:微小流量进气管路主要由电动可变泄漏阀组成,其作用是以极小的流量形式调节腔体的进气流量。[/size][size=16px] 进气管路:进气管路的作用是连接气源和为腔体提供多种压力恒定的工作气体,图3中并未绘出。进气管路中也可以通过增加混气罐来进行各种进气的混合。[/size][size=16px] 通过上述四条管路以及相应的真空度传感器和真空压力控制器,图3所示的闭环控制系统可实现从超高真空度至一个大气压的全量程真空压力精确控制,具体控制的过程如下:[/size][size=16px] (1)低真空度范围(10mBar~1Bar):在低真空度范围内,双通道真空压力控制器的第一通道采集1000Torr电容真空计(测量精度0.25%)的真空度测量信号,与设定值比较后驱动电动球阀,通过快速改变电动球阀的开度调节排气流量,从而在低真空度范围内实现1%内的控制精度。需要注意的是在低真空度范围控制时,大流量进气管路上的电动针阀要保持恒定开度。[/size][size=16px] (2)高真空度范围(0.01mBar~10mBar):在高真空度范围内,双通道真空压力控制器的第二通道采集10Torr电容真空计(测量精度0.25%)的真空度测量信号,与设定值比较后驱动电动针阀,通过快速改变电动针阀的开度调节进气流量,从而在高真空度范围内实现1%内的控制精度。需要注意的是在高真空度范围控制时,抽气管路上的电动球阀要始终处于全开状态。[/size][size=16px] (3)高真空度范围(10[sup]-10[/sup]mBar~0.01mBar):在超高真空度范围内,真空压力控制器采集电离真空计(测量精度15%)的真空度测量信号,与设定值比较后驱动电动可变泄漏阀,通过快速改变泄漏阀的进气流量,从而在超高真空度范围内实现15%内的控制精度。需要注意的是在超高真空度范围控制时,抽气管路上的电动球阀要始终处于全开状态,大流量进气管路上的电动针阀处于关闭状态,而分子泵处于工作状态。[/size][size=16px] 在真空压力的控制过程中,要实现高精度控制,以下部件需要达到相应的技术指标要求:[/size][size=16px] (1)真空度传感器:真空度传感器的测量精度是决定控制精度的关键指标之一,本解决方案在低真空和高真空范围内采用了精度可达0.25%的薄膜电容真空计,而在超高真空范围内采用了精度最高可达15%的电离真空计。[/size][size=16px] (2)阀门:各种进气和排气阀门调节精度和速度也是决定控制精度的关键指标,解决方案所采用的电动针阀、电动球阀和电动可变泄漏阀都具有非常好的调节精度,响应速度都小于1秒以内,其中可变泄漏阀的响应速度可以到达十几微秒,完全可以满足超高真空度的进气控制。[/size][size=16px] (3)真空压力控制器:真空压力控制器的采集精度、调节输出精度和线性化处理功能也是决定控制精度的关键指标,解决方案采用了VPC2021系列超高精度PID调节器,具有24位AD、16位DA、0.01%最小输出百分比和八点拟合处理功能,可很好的实现全量程真空度的精密控制。[/size][size=18px][color=#000099][b]3. 总结[/b][/color][/size][size=16px] 综上所述,本文提出的解决方案可很好的实现环境可控原子力显微镜从超高真空至一个大气压全真空度范围内任意真空压力设定点的准确控制,也可以按照设定的真空度变化曲线进行程序控制。另外,此解决方案可以推广应用到各种显微镜的真空度和气氛环境的精密控制。[/size][size=18px][color=#000099][b]4. 参考文献[/b][/color][/size][size=16px] [1] Choi, Joong Il Jake, et al. "Ambient-pressure atomic force microscope with variable pressure from ultra-high vacuum up to one bar." Review of Scientific Instruments 89.10 (2018).[/size][size=16px][/size][align=center][b]~~~~~~~~~~~~~~~[/b][/align][size=16px][color=#000099][b][/b][/color][/size]
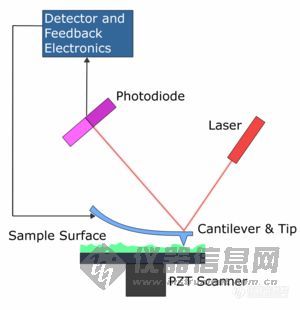
原子力显微镜(atomic force microscope,简称AFM)利用微悬臂感受和放大悬臂上尖细探针与受测样品原子之间的作用力,从而达到检测的目的,具有原子级的分辨率。由于原子力显微镜既可以观察导体,也可以观察非导体,从而弥补了扫描隧道显微镜的不足。原子力显微镜是由IBM公司苏黎世研究中心的格尔德?宾宁与斯坦福大学的Calvin Quate于一九八五年所发明的,其目的是为了使非导体也可以采用类似扫描探针显微镜(SPM)的观测方法。原子力显微镜(AFM)与扫描隧道显微镜(STM)最大的差别在于并非利用电子穿隧效应,而是检测原子之间的接触,原子键合,范德瓦耳斯力或喀希米尔效应等来呈现样品的表面特性。1. 工作原理原子力显微镜的原理示意图: Detector and Feedback Electronics 侦检器及回馈电路; Photodiode 感光二极管; Laser 激光器; Sample Surface 样品表面; Cantilever & Tip 微悬臂及探针; PZT Scanner 压电扫描器 AFM的关键组成部分是一个头上带有一个用来扫描样品表面的尖细探针的微观悬臂。这种悬臂大小在数十至数百微米,通常由硅或者氮化硅构成,其上载有探针,探针之尖端的曲率半径则在纳米量级。当探针被放置到样品表面附近的地方时,悬臂会因为受到探针头和表面的引力而遵从胡克定律弯曲偏移。在不同的情况下,这种被AFM测量到的力可能是机械接触力、范德华力、毛吸力、化学键、静电力、磁力(见磁力显微镜)喀希米尔效应力、溶剂力等等。通常,偏移会由射在微悬臂上的激光束反射至光敏二极管阵列而测量到,较薄之悬臂表面常镀上反光材质( 如铝)以增强其反射。其他方法还包括光学干涉法、电容法和压电效应法。这些探头通常由采用压电效应的变形测量器而制得。通过惠斯登电桥,探头的形变何以被测得,不过这种方法没有激光反射法或干涉法灵敏。 当在恒定高度扫描时,探头很有可能撞到表面的造成损伤。所以通常会通过反馈系统来维持探头与样品片表面的高度恒定。传统上,样品被放在压电管上并可以在z方向上移动以保持与探头之间的恒定距离,在x、y方向上移动来实现扫描。或者采用一种“三脚架”技术,在三个方向上实现扫描。扫描的结果S(x,y)就是样品的表面图。AFM可以在不同模式下运行。这些模式可以被分为接触模式(Contact Mode)、非接触(Non-Contact Mode)、轻敲模式(Tapping Mode)、侧向力(Lateral Force Mode)模式。2. 优点与缺点 相对于扫描电子显微镜,原子力显微镜具有许多优点。不同于电子显微镜只能提供二维图像,AFM提供真正的三维表面图。同时,AFM不需要对样品的任何特殊处理,如镀铜或碳,这种处理对样品会造成不可逆转的伤害。第三,电子显微镜需要运行在高真空条件下,原子力显微镜在常压下甚至在液体环境下都可以良好工作。这样可以用来研究生物宏观分子,甚至活的生物组织。和扫描电子显微镜(SEM)相比,AFM的缺点在于成像范围太小,速度慢,受探头的影响太大。[img]http://ng1.17img.cn/bbsfiles/images/2008/12/200812311440_127077_1664664_3.jpg[/img]








 我要推广仪器
我要推广仪器
 下载APP
下载APP


