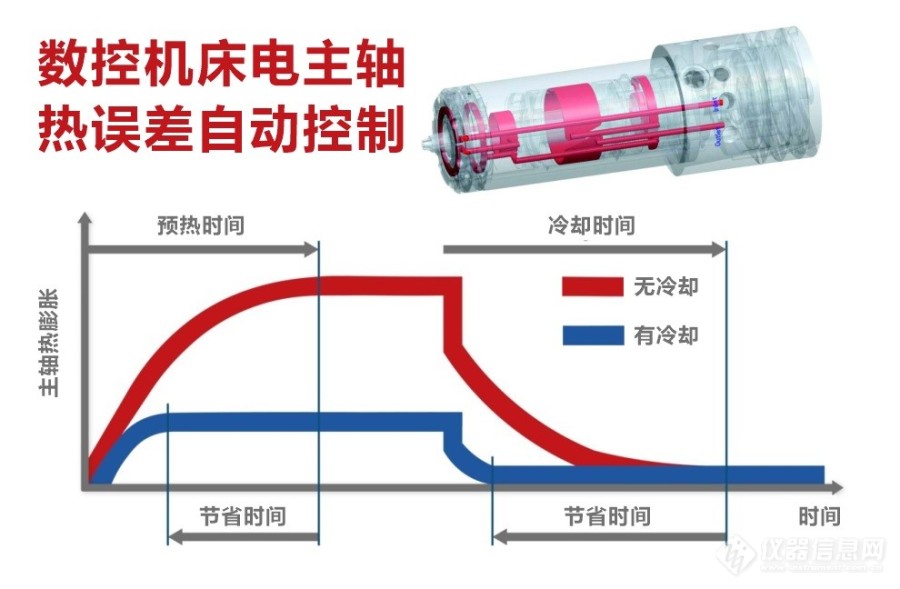
[b][color=#990000][size=16px]摘要:为解决电主轴热误差影响大以及预热和冷却响应速度慢的问题,本文基于改变冷却介质热容可调节散热量的原理,提出了高速和高精度冷却液流量调节的闭环控制解决方案。解决方案中的反馈式闭环控制系统主要包括非接触式位移传感器、高速电控针阀和高精度[/size][size=16px]PID[/size][size=16px]控制器,通过高速和高精度电控针阀对冷却介质流量进行实施调节,可快速改变作用在主轴上的散热量,使主轴轴向热变形快速达到最小值并始终保持稳定状态。[/size][/color][/b][align=center][size=16px][img=高速电主轴冷却系统中的电控针阀流量闭环控制解决方案,600,392]https://ng1.17img.cn/bbsfiles/images/2023/07/202307060506528065_863_3221506_3.jpg!w690x451.jpg[/img][/size][/align][size=18px][color=#990000][b]1. 问题的提出[/b][/color][/size][size=16px] 对于高速数控机床而言,热误差是机床最主要误差,而电主轴则是热误差的主要误差源之一。为有效降低电主轴发热的影响,研究工作主要集中在电主轴冷却结构和冷却控制方面,但仍存在以下两方面的技术难点需要攻克:[/size][size=16px] (1)冷却效果差:还需根据电主轴内部温度场的分布进行冷却结构设计以及差异化冷却。[/size][size=16px] (2)响应速度慢:缺乏主动热误差控制技术手段,需实现电主轴温度的自动闭环控制。[/size][size=16px] 目前国际上电主轴热误差控制的最高水平是瑞士FISCHER公司的电主轴及其主动式冷却技术,其关键是将冷却回路集成在主轴中而大幅降低了热误差,使轴向膨胀减少了70%。特别是响应速度极快,预热和冷却时间大幅减少,等待时间缩短五倍。其热误差控制效果如图1所示。[/size][align=center][size=16px][color=#990000][b][img=01.瑞士FISCHER公司电主轴冷却效果示意图,650,288]https://ng1.17img.cn/bbsfiles/images/2023/07/202307060509497004_7930_3221506_3.jpg!w690x306.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#990000][b]图1 瑞士FISCHER公司电主轴冷却效果示意图[/b][/color][/size][/align][size=16px] 为解决国内电主轴热误差影响大以及预热和冷却响应速度慢的问题,本文基于改变冷却介质热容以调节散热的原理,提出了高速和高精度冷却液流量调节的闭环控制解决方案。[/size][size=18px][color=#990000][b]2. 解决方案[/b][/color][/size][size=16px] 在电主轴冷却过程中,除了需要电主轴具有合理的冷却结构之外,还要求能将主轴所产生的热量及时带走,并使主轴受热引起的膨胀量快速达到最小值且保持恒定。[/size][size=16px] 针对国内电主轴冷却响应速度慢的问题,本文的解决方案是基于改变冷却介质热容的原理,即改变冷却介质流量来改变冷却介质热容,这意味着快速改变了作用在主轴上冷却量,由此来主动调节主轴温度并快速达到稳定。解决方案的实施采用闭环控制系统,闭环控制系统包括检测电主轴热膨胀位移量的非接触位移探测器、接收主轴热膨胀变形信号的高精度PID控制、受PID控制器驱动并对恒温冷却介质流量进行高速精密调节的电子针阀,此闭环控制系统结构如图2所示。[/size][align=center][size=16px][color=#990000][b][img=02.电主轴主动冷却闭环控制系统结构示意图,500,287]https://ng1.17img.cn/bbsfiles/images/2023/07/202307060510119009_2558_3221506_3.jpg!w690x397.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#990000][b]图2 电主轴主动冷却闭环控制系统结构示意图[/b][/color][/size][/align][size=16px] 在此解决方案中,闭环控制系统中每一个部件的精度和响应速度等技术指标都会影响到电主轴最终热误差的控制精度。[/size][size=16px] 对于非接触位移探测器而言,需要具有几个微米的测量精度和一秒量级的响应速度,对于高速高精度机场的电主轴则可能需要更高位移测量精度和响应速度。位移探测器一般选择激光式或电容式位移传感器。[/size][size=16px] 对于冷却介质流量的调节,需根据电主轴规格、发热量和冷却介质最大输出流量选择相应流量调节范围的电控针阀,但无论流量调节是什么范围,都要求电控针阀具有小于一秒的响应速度,并具有很好的线性度,为此在本解决方案中选择采用了NCNV系列电动针阀,可直接采用模拟信号0~10V进行控制,响应速度800ms,线性度0.1~11%,孔径范围为0.95~6.7mm,液体水的最大流量范围是0.94~62.4L/min,流量调节分辨率为0.1~2L/min,完全可以满足各种规格电主轴的快速冷却调节。[/size][size=16px] 对于PID控制器,解决方案选择了VPC2021系列超高精度PID控制器,此PID控制器具有24位AD、16位DA和0.01%最小输出百分比,可充分发挥位移探测器和电控针阀的高精度优势。同时此系列PID控制器还具有独立双通道控制、PID自整定、RS485通讯接口、串行控制和计算机软件等高级功能,可对两个冷却回路进行同时控制,便于进行调试以及后续的上位机通讯。[/size][size=18px][color=#990000][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过此解决方案所使用的直接冷却流量调节的闭环控制系统,结合合理的冷却结构设计,可大幅度减少电主轴的轴向膨胀,使预热和冷却速度更快,可大幅缩短等待时间。更重要的是采用了闭环控制方式,使电主轴始终处于稳定的热条件下,保证了加工精度的重复性,使得废品率更低。另外这种主动式冷却方案可有效散发主轴中产生的热量,提高了电机过载能力。[/size][size=16px][/size][align=center][size=16px][b][color=#990000]~~~~~~~~~~~~~~~~~[/color][/b][/size][/align]
近日,由中科院科研装备研制项目资助的“小型化视网膜自适应光学连续成像仪”研制工作在光电技术研究所顺利完成。该成像仪通过校正人眼像差可以获得高分辨率眼底视网膜图像,在临床疾病早期诊断等方面具有重要应用价值。 变形镜作为自适应光学系统的核心器件,其性能决定了成像仪的整机性能。光电所前期研制的视网膜自适应光学成像仪采用分立式压电驱动变形镜,受目前构造工艺的限制,其变形量小、口径大、成本高,难以适应临床大规模人群使用和产业化推广,寻求一种新型的变形镜以突破其临床应用限制已成为成像仪产业化推广过程中亟待解决的问题之一。与此同时,由于双压电片变形镜具有构造简单、结构灵活多样且易于小型化等优点,在眼科自适应光学领域具有较好的应用前景。因此,光电所于2010年开展了基于双压电片变形镜的新一代小型化视网膜自适应光学成像仪研制。 项目组在前期研究工作的基础上,针对人眼像差特性,设计并研制成功35单元双压电片变形镜,其行程达到20微米,而口径仅有原来分立式压电驱动变形镜口径的一半。在变形镜研制的基础上,先后解决基于双压电片变形镜的AO系统优化设计、闭环控制算法等关键技术,研制成功首套基于双压电片变形镜的小型化视网膜自适应光学成像仪,其体积仅为原来37单元成像仪的一半,但像差校正性能却得到大幅提升,大大降低了对人眼低阶像差预补偿的要求。 通过小规模人眼实验表明,新一代成像仪分辨率高、像差校正范围大、操作简单,这为其临床大规模人群使用和产业化推广走出重要一步。
请问各位大侠们,国内生产的拉力机有那些是采用三闭环控制系统的,有什么优点?
[font=arial, helvetica, sans-serif]在工业化初期,测量机械结构的试验力至关重要。大约在1940年,一种应变式称重传感器被发明出来。用于测量试验力并将该力值以电信号形式输出的力传感器,大部分使用应变片来将材料变形/力转换成电信号。[/font][back=transparent][font=arial, helvetica, sans-serif]19世纪50年代,力传感器应用于拉伸和压缩试验机。力传感器理想[/font][/back]的安装位置,是在与工件的连接处的前端或尽量靠近的区域。电子系统利用反馈信号来调节加载装置,进而得到设定的试验力。[font=arial, helvetica, sans-serif][back=transparent]基于闭环系统的优越性能,如今,所有电子拉伸压缩试验机都只采用闭环控制。闭环系统可以连续测量加载试验力,且闭环系统中使用的组件比砝码式要简单得多。正如上文提到的砝码式系统,为确保运行正常,砝码式系统要求杠杆、轴点和零部件间的摩擦(相互配合)。[/back][/font][back=transparent][font=arial, helvetica, sans-serif]对于一台硬度计,压头是测试系统与样品接触的一[/font][/back]部分,它是获得正确硬度值最重要的一个因素。为了消除结构缺陷的影响,机械方面的移动或其他干扰都会影响试验力,因此力传感器需与压头尽可能靠近。[back=transparent][font=arial, helvetica, sans-serif][back=transparent]只有这样,基于力传感器的优势,闭环系统才能获得[/back]较高的[/font][/back][font=arial, helvetica, sans-serif][back=transparent]试验力精度。如将力传感器安装在硬度计其他位置,它相对于传统砝码式系统的优势将不复存在。[/back][/font][img=闭环控制,544,622]https://ng1.17img.cn/bbsfiles/images/2022/02/202202280925498150_4925_3317_3.jpg!w544x622.jpg[/img][font=arial, helvetica, sans-serif][back=transparent][b]闭环系统的优势:[/b][/back]高精度试验力力反馈系统确保加载试验力的准确性宽泛的试验力且不受限于机械结构简便的测试流程对比砝码系统,简化机械结构简单的校正程序[/font][font=arial, helvetica, sans-serif][back=transparent][b]闭环系统的缺点:[/b][/back]对比砝码系统,价格更贵需要供电系统[/font]
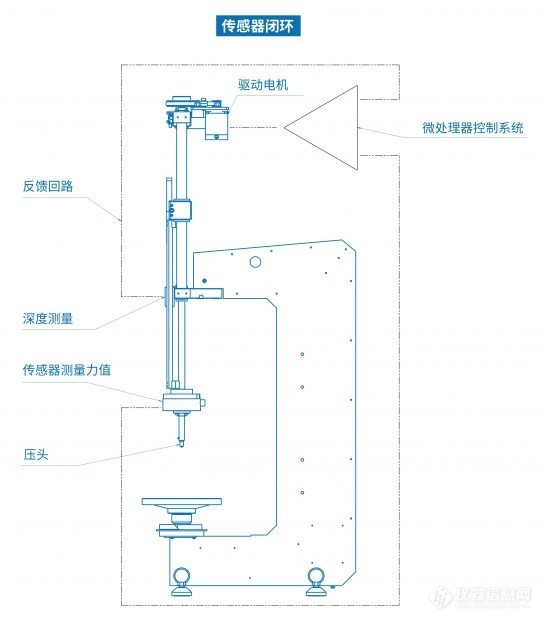
[font=arial, helvetica, sans-serif]在工业化初期,测量机械结构的试验力至关重要。大约在1940年,一种应变式称重传感器被发明出来。用于测量试验力并将该力值以电信号形式输出的力传感器,大部分使用应变片来将材料变形/力转换成电信号。[/font][size=14px][back=transparent][font=arial, helvetica, sans-serif]19世纪50年代,力传感器应用于拉伸和压缩试验机。力传感器理想[/font][/back]的安装位置,是在与工件的连接处的前端或尽量靠近的区域。电子系统利用反馈信号来调节加载装置,进而得到设定的试验力。[/size][font=arial, helvetica, sans-serif][size=14px][back=transparent]基于闭环系统的优越性能,如今,所有电子拉伸压缩试验机都只采用闭环控制。闭环系统可以连续测量加载试验力,且闭环系统中使用的组件比砝码式要简单得多。正如上文提到的砝码式系统,为确保运行正常,砝码式系统要求杠杆、轴点和零部件间的摩擦(相互配合)。[/back][/size][/font][size=14px][back=transparent][font=arial, helvetica, sans-serif]对于一台硬度计,压头是测试系统与样品接触的一[/font][/back]部分,它是获得正确硬度值最重要的一个因素。为了消除结构缺陷的影响,机械方面的移动或其他干扰都会影响试验力,因此力传感器需与压头尽可能靠近。[/size][back=transparent][font=arial, helvetica, sans-serif][back=transparent]只有这样,基于力传感器的优势,闭环系统才能获得[/back]较高的[/font][/back][font=arial, helvetica, sans-serif][back=transparent]试验力精度。如将力传感器安装在硬度计其他位置,它相对于传统砝码式系统的优势将不复存在。[/back][/font][img=闭环控制,544,622]https://ng1.17img.cn/bbsfiles/images/2022/02/202202280925498150_4925_3317_3.jpg!w544x622.jpg[/img][font=arial, helvetica, sans-serif][size=14px][back=transparent][b]闭环系统的优势:[/b][/back]高精度试验力力反馈系统确保加载试验力的准确性宽泛的试验力且不受限于机械结构简便的测试流程对比砝码系统,简化机械结构简单的校正程序[/size][/font][font=arial, helvetica, sans-serif][size=14px][back=transparent][b]闭环系统的缺点:[/b][/back]对比砝码系统,价格更贵需要供电系统[/size][/font]
科技日报 2012年04月25日 星期三 本报讯 实时3D微观组织成像技术的出现不啻为癌症诊断、微创手术和眼科等医疗领域的一场革命。据物理学家组织网4月23日报道,美国伊利诺伊大学的研究人员开发出用计算自适应光学系统校正光学层析成像的畸变技术,给未来医疗的“高清”成像带来前景。相关技术成果刊登在最新一期美国《国家科学院学报》在线版上。 美国贝克曼研究所高级科学和技术博士后研究员史蒂芬说:“该技术能够超越现在的光学系统,最终获得最佳品质的图像和三维数据。这将是非常有用的实时成像技术。” 畸变如散光或扭曲困扰着高分辨率成像。其会使对象细点的地方看上去如斑点或条纹。分辨率越高,问题会变得更糟糕。这是在组织成像中特别棘手的问题,而精度对于正确诊断至关重要。 自适应光学可以校正成像的畸变,被广泛应用于天文学来校正当星光过滤器通过大气层的变形。医学科学家已经开始将这种自适应光学系统的硬件应用于显微镜,希望能改善细胞和组织成像。 但伊利诺伊大学生物工程内科医学的电子和计算机工程教授斯蒂芬指出,这同样富有挑战,将其应用于组织、细胞成像,而不是通过大气对星星成像,存在很多光学上的问题。基于硬件的自适应光学系统复杂而昂贵,调整繁琐,故不太适用于医疗扫描。 由此,该团队采用计算机软件来发现并纠正图像畸变,替代硬件的自适应光学,称为计算自适应光学技术。研究人员用此技术演示了大鼠肺组织含有微观粒子凝胶的幻影。用光学成像设备干涉显微镜的两束光扫描组织样本,计算机收集所有数据后,纠正所有的深度图像,使模糊的条纹变成尖锐的点而特征显现,用户可用鼠标点击改变参数。研究人员说:“我们能够纠正整个研究体积的畸变,在其任何地方呈现高清晰度图像。由此,现在可以看到以前不是很清楚的所有组织结构。” 该技术可以应用于许多医院和诊所的台式电脑,可对任何类型进行干涉成像,如光学相干断层扫描。(华凌)
在很多AFM介绍中看到闭环扫描的概念,感觉非常奇怪,闭环在这里是指得什么意思呢?难道还有开环的AFM不成?
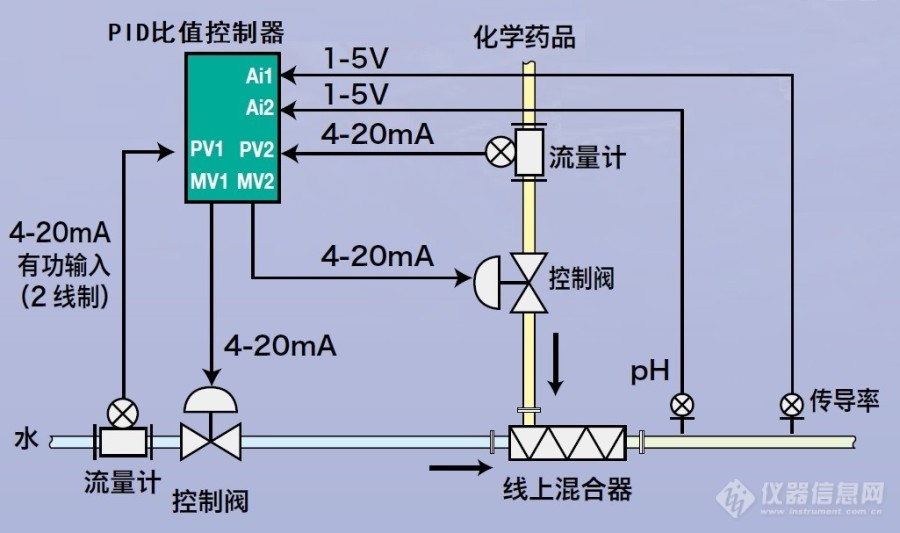
[size=16px][color=#339999][b]摘要:在目前的流体比值混合控制系统中,普遍采用的是多通道闭环PID控制系统对各路流量进行准确控制后再进行混合,这种控制方式普遍存在的问题是对流量调节阀的响应速度、耐腐蚀性和线性度有很高要求。为此本文提出的第一个解决方案是采用NCNV系列强耐腐蚀的高速和高线性度电控针阀,第二个解决方案则是不再使用流量调节阀,改用压力控制器通过调节流体进口压力来实现流量的精密控制,而第二种方案更适用于微流量的精密控制。[/b][/color][/size][align=center][b][color=#339999]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/b][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 在医药实验室、燃烧系统和化工领域的生产过程中,常需要将两种或两种以上的流体物料保持一定的比例进行混合,如比例一旦失调,将影响质量甚至造成事故,因此这种多种流体精密混合的控制需要采用精密的PID比值控制系统。一个比较典型的两种流体混合的双闭环PID比值控制系统如图1所示,但这种比值控制系统存在以下几方面的问题和注意事项:[/size][align=center][size=18px][color=#339999][b][img=常用双回路比值控制系统示意图,600,354]https://ng1.17img.cn/bbsfiles/images/2023/08/202308231002390515_7752_3221506_3.jpg!w690x408.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 常用化学药品注入双回路比值控制系统示意图[/b][/color][/size][/align][size=16px] (1)图1所示结构是一种典型的流量调节方式的控制系统,即通过两个控制阀同时调节两路流体流量,并使两路流量达到设定比值,以实现混合后的准确比率。但这种流量调节方式的前提是其中的两路液体必须有相应的压力进行驱动,且要求相应的驱动压力尽可能稳定。[/size][size=16px] (2)流量调节方式要求控制阀具有较快的调节速度,如果流量调节速度慢于驱动压力的波动速度,则很难实现准确控制。[/size][size=16px] (3)在很多流体比值混合中,流体介质往往都带有腐蚀性,这就要求液体流动管路中的所有装置都需要具有耐腐蚀性,特别是对内部带有运动机构的控制阀,其耐腐蚀性尤为关键。[/size][size=16px] (4)PID控制是一种典型的线性控制技术,为了保证比值控制的准确性,除了要求流量计和PID控制器具有相应的测量控制精度之外,更要求控制阀开度与控制信号之间具有很好的线性关系,否则很难实现较高精度的流量控制,从而也无法实现高精度的比值控制。[/size][size=16px] 上述的快速调节能力、耐腐性以及线性度往往是对流量控制阀的严峻挑战,很少有控制阀能同时满足这些要求,而且口径越大的控制阀越难实现。[/size][size=16px] 为了解决比值控制中控制阀中存在的响应速度、耐腐蚀性和线性度问题,本文提出了两种解决方案。第一种方案是在流量调节的基础上,采用耐腐蚀的线性度好的高速数控针阀;第二种方案是采用压力控制方式来实现流量调节,省略掉流量控制阀,同样可以实现高精度比值控制。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 本文在这里设计了两套解决方案,第一套方案还是采用流量调节技术,只是对控制阀和比值控制器进行了明确,关键是将流量控制阀采用了NCNV系列步进电机驱动的高速高线性度的数控针阀来代替,整个控制系统结构如图2所示。[/size][align=center][size=16px][color=#339999][b][img=采用高速数控针阀的比值控制系统,600,341]https://ng1.17img.cn/bbsfiles/images/2023/08/202308231003088266_938_3221506_3.jpg!w690x393.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 采用高速数控针阀的比值控制系统[/b][/color][/size][/align][size=16px] 所用的NCNV数控针阀的通经范围为0.9~4.1mm(甚至更大),全量程响应时间小于1秒,可实现高速流量调节。由于采用了步进电机驱动,从而具有很小的磁滞和优于±2%的线性度,全量程的重复精度可以达到±0.1%。另外此系列数控针阀还具有极低的漏率,可用于对真空密封要求苛刻的使用场合。数控针阀的控制除了可以直接采用0~10V模拟电压控制之外,也可采用RS485信号进行通讯控制。[/size][size=16px] 图2所示的流量调节比值控制系统中,比值控制器采用了VPC2021系列多功能PID控制器。此控制器具有两路独立通道进行比值控制。重要的是这两路PID控制通道都具有24位AD采集精度和16位DA控制精度,由此可进行高精度的比值控制,还可以满足微小流量变化的控制要求。[/size][size=16px] 在第二套解决方案中,采用了压力控制器、流量计和比值控制器构成的双闭环控制回路来进行每个独立管路中的流量控制,由此最终实现比值控制。由于每个管路中的管径保持不变,那么通过改变进液压力就可以调节流量。这种采用压力控制方式的比值控制系统如图3所示。进液压力控制可以采用对进液容器内部的气压控制方式将流体压出,这时的气压控制就相当于一个气压泵,此流量控制方式可以实现很高的控制精度。[/size][align=center][size=16px][color=#339999][b][img=采用压力控制器的比值控制系统,600,338]https://ng1.17img.cn/bbsfiles/images/2023/08/202308231003293037_3318_3221506_3.jpg!w690x389.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图3 采用压力控制器的比值控制系统[/b][/color][/size][/align][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过上述的两套解决方案,可以很好的解决目前流体混合中比值控制在响应速度、耐腐蚀性和线性度等方面存在的问题,可以实现流体比值混合的高精度控制。特别在第二套解决方案中所采用的压力控制技术,去掉了流量控制阀,但增加了压力控制来调节流量,由此可以实现超高精度的流量控制,特别适用于微流量的快速控制,可推广应用于微流控领域。[/size][align=center][size=16px][/size][/align][align=center][b][color=#339999]~~~~~~~~~~~~~~~[/color][/b][/align][size=16px][/size]
全国首个食品安全追溯闭环管理系统“浙食链”正式上线, 实现从田间到餐桌的全流程监管。
[font=-apple-system, BlinkMacSystemFont, &][size=18px]20日,张家口冬奥村开启全面闭环管理,约4000名工作员工、志愿者等已陆续进村闭环工作。[/size][/font]
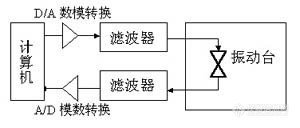
振动台闭环数控程序(以下简称:VibControl控制系统)是基于系统非线性迭代补偿理论来对控制信号和响应信号进行修正的。1.1 单自由度系统构成[img]http://ng1.17img.cn/bbsfiles/images/2009/11/200911230112_185926_1634361_3.jpg[/img]1.2 六自由度系统构成[img]http://ng1.17img.cn/bbsfiles/images/2009/11/200911230113_185927_1634361_3.jpg[/img]液压振动台其实就是电液伺服技术的进一步扩展,不过在高性能和大吨位的技术上远远高于电磁台的水平,如大型地震模拟系统和整个装甲车的振动模拟系统都是液压振动台.
广东:广州海珠1地调整为低风险。东莞18日通报1例本土:初判密接者163人,全市进行闭环管理,13个重点区域封闭管理,启动全员检测,东城、南城、万江、麻涌4地高速路口只进不出
三闭环电子万能材料试验机具有常规电子万能类试验机的速度范围宽,试验行程大,配置灵活的特点,又具有电液伺服类试验机力、位移、变形控制的优点。因而是性能较好的一种试验机,但由于做力控制与变形控制时机器稳定性与主机的刚性、试样的刚性有密切的关系。一般塑料用试验机吨位较小,因此主机刚性较低,且试样本身的刚性也不会太大,所以该类试验机很少有10KN以下的机型,而10KN以下机型却是塑料类最常用的。三闭环电子万能材料试验机的稳定性与试样有关,若试样单一,试验方法也较为单一,还可选用,否则就需要随时调整试验机的控制参数(亦即常规的P、I、D参数),这对非自动控制专业的试验员来说,几乎是很难想象的事。因此从整体看,除对控制方式有特定的要求,还不易选择做塑料材料的试验。
8月5日31省份新增本土80例。郑州、登封:全市小区(村)实行闭环管理。广东:所有师生员工开学前14天务必返回居住地。广州:暂关KTV棋牌室
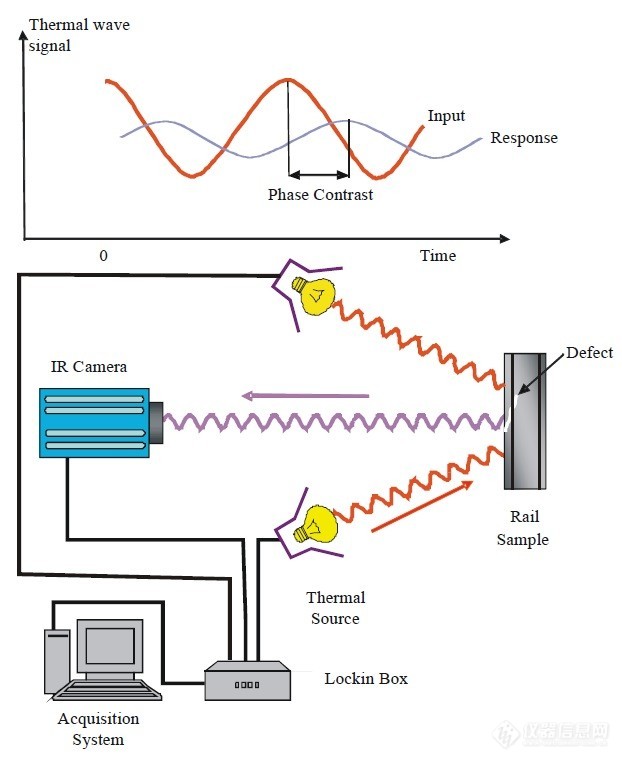
[size=16px][color=#339999][b]摘要:针对目前锁相红外热成像无损检测中存在被检物温度偏离标准正弦波形式的检测模型,以及被检物温度无法准确控制和快速达到稳定的问题,本文提出了改进解决方案。解决方案的核心是将现有的激励光源开环控制模式改进为闭环控制,具体采用了具有远程设定点功能的PID温度控制器,将现有光源的正弦波功率调制改进为直接的被检物表面温度正弦波调制,由此更符合理论模型,且可使被检物平均温度快速达到稳定而大幅缩短检测时间。[/b][/color][/size][align=center][size=18px][color=#339999][b]~~~~~~~~~~~~~~~~~~~~~[/b][/color][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 如图1所示,锁相红外热成像无损检测技术使用周期性调制热源,对待测物体进行周期加热。若待测物体内部有缺陷,该缺陷对其上方表面温度分布会产生周期性的影响,因此有缺陷和无缺陷地方会产生幅值差和相位差的热特征,这些特征通过红外热像仪成像捕获。采集到的热图序列中存在着各种干扰信号,通过锁相技术可以将微弱的有用信号从众多干扰信号中分离出来,可大幅提高检测的灵敏度。但这种红外锁相或其他光激励热成像法存在以下严重问题:[/size] [align=center][size=18px][color=#339999][b] [img=红外锁相热成像检测原理及其系统,500,611]https://ng1.17img.cn/bbsfiles/images/2023/07/202307031442140543_4031_3221506_3.jpg!w622x761.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 红外锁相热成像检测原理及其系统[/b][/color][/size][/align][size=16px] (1)因为现有技术只能对激励热源的加载功率进行正弦波调制,但并不能真正保证被测物体内部的温度变化也是真正的正弦波形式,这使得热像仪获得的热波波形与检测理论模型存在较大偏差,这是目前造成此方法误差的最大原因。[/size][size=16px] (2)目前锁相法调制光源加热被测物体时的温度时间变化曲线如图2所示,要经过较长时间温度才能达到稳定状态,对于较大或较厚物体用时将会更长,其中最大的问题是温度升高多少无法准确控制,只能靠经验或多次试验来确定调制光源的加热功率以实现所希望的温度变化。[/size][align=center][size=18px][color=#339999][b][img=红外锁相法加热过程中的时间-温度变化曲线图,500,379]https://ng1.17img.cn/bbsfiles/images/2023/07/202307031442434774_7846_3221506_3.jpg!w472x358.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 红外锁相法加热过程中的时间-温度变化曲线图[/b][/color][/size][/align][size=16px] 由此可见,目前的红外锁相法还较粗狂,整个控制还是一个开环控制过程,这使得在实际无损检测中边界条件无法准确匹配测试模型,温度变化波形和大小也无法做到准确控制。为了解决这些问题,本文提出了如下一种闭环控制解决方案。[/size][b][size=18px][color=#339999]2. 解决方案[/color][/size][/b][size=16px] 为使被检物体内部的温度变化符合测试模型中正弦波形式的要求,本文提出的解决方案是采用闭环控制加热模式,即在被检物体的表面或内部安装温度传感器,与PID控制器和激励光源组成闭环控制回路,通过正弦波形式的设定点输入,最终将被检物体表面或内部温度准确控制并与正弦波温度设定曲线吻合。整个闭环控制系统结构如图3所示。[/size][align=center][size=16px][color=#339999][b][img=正弦波温度加热光源控制系统结构示意图,650,387]https://ng1.17img.cn/bbsfiles/images/2023/07/202307031443195882_6318_3221506_3.jpg!w690x411.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图3 正弦波温度加热光源控制系统结构示意图[/b][/color][/size][/align][size=16px] 从图3可以看出,由增加的温度传感器、卤素灯加热光源和控制器组成的闭环控制回路,可以对被检物表面温度进行任意设定点下的精确控制。但为了使表面温度能够严格按照所希望幅值和周期的正弦波形式进行变化,解决方案中采用一种多功能的高级PID控制器VPC2021。此控制器具有外部设定点功能,即通过外接周期信号发生器,可以使VPC2021控制器的温控设定值严格按照信号发生器的输出进行改变,即温控设定值可以设计为一个随时间变化的周期性正弦波。由此可以实现以下两个功能:[/size][size=16px] (1)可任意设定加热正弦波的频率和幅值,以满足不同无损检测对象的需要。[/size][size=16px] (2)可任意设定加热正弦波的平均值大小,由此可实现任意温度下的正弦波热波控制,并能很快达到稳定状态而开始进行无损检测,有效缩短检测时间。[/size][size=16px] VPC2021系列超高精度PID调节器是具有远程设定点功能的控制器,具有两个输入通道,第一主输入通道作为过程传感器输入,第二辅助输入通道用来作为远程设定点输入。与主输入信号一样,辅助输入的远程设定点也能接受47种类型的输入信号,其中包括10种热电偶温度传感器、9种电阻型温度传感器、3种纯电阻、10种热敏电阻、3种模拟电流和12种模拟电压,即任何探测信号只要能转换为上述47种类型型号,都可以直接接入第二辅助输入通道作为远程设定点源。在红外锁相法无损检测中使用远程设定值功能时的具体接线如图4所示。[/size][align=center][size=16px][color=#339999][b][img=远程设定点功能使用接线图,690,247]https://ng1.17img.cn/bbsfiles/images/2023/07/202307031443467549_5148_3221506_3.jpg!w690x247.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图4 远程设定点功能使用接线图[/b][/color][/size][/align][size=16px] 在使用远程设定值功能前,需要对控制器辅助输入通道参数进行设置,以满足以下要求:[/size][size=16px] (1)辅助通道上接入的远程设定点信号类型要与主输入通道完全一致。[/size][size=16px] (2)辅助通道的显示上下限也要与主输入通道完全一致。[/size][size=16px] (3)显示辅助通道接入的远程设定点信号大小的小数点位数要与主输入通道保持一致。[/size][size=16px] 完成辅助输入通道参数的设置后,开始使用远程设定点功能时,还需要激活远程设定值功能。远程设定值功能的激活有以下两种方式:[/size][size=16px] (1)仅使用远程设定点,不使用本地设定点:在PID控制器中,设置辅助输入通道2的功能为“远程SV”,相应数字为3。[/size][size=16px] (2)可进行远程和本地设定点之间切换:在PID控制器中,设置辅助输入通道2的功能为“禁止”,相应数字为0。然后设置外部开关量输入功能DI1为“遥控设定”,相应数字为2。通过这种外部开关量输入功能的设置,就可以采用图4中所示的纽子开关实现远程设定点和本地设定点之间的切换,开关闭合是为远程设定点功能,开关断开时为本地设定点功能。[/size][size=16px] 需要注意的是,无论采用哪种远程设定点激活和切换方式,在输入信号类型、显示上下限范围和小数点位数这三个参数选项上,辅助输入通道始终要与主输入通道保持一致。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过此解决方案所使用的具有远程设定点功能的PID控制器,结合外置周期信号发生器,可很好实现锁相红外热成像无损检测中的正弦波温度闭环控制,使得被检物体内部的稳态正弦温度波更符合无损检测模型,并使得被检物温度快速达到所希望的测试温度而缩小检测时间,最终可使得锁相红外成为更精密化的无损检测技术。[/size][align=center][size=16px][color=#339999][b][/b][/color][/size][/align][align=center][size=16px][b][color=#339999]~~~~~~~~~~~~~~~~~[/color][/b][/size][/align][size=16px][/size]
[font=-apple-system, BlinkMacSystemFont, &][size=18px]23日,北京冬奥会和冬残奥会第二版防疫手册发布,规定闭环内人员每日需进行核酸检测。[/size][/font]
天津市疾病预防控制中心对12月9日天津市境外输入新冠病毒无症状感染者呼吸道标本进行新冠病毒全基因组测序和序列分析,经中国疾病预防控制中心复核,均确认检出新冠病毒奥密克戎变异株(B.1.1.529进化分支)。在津感染者系入境闭环管控人员,目前于定点医院隔离治疗。据悉,这是中国内地首次发现新冠病毒奥密克戎变异株。(国是直通车)
闭环测试是什么意思啊,如果勾选会使拉力机不准呢。不知道怎么回事。
[font=宋体, SimSun][size=18px]有关单位:[/size][/font][font=宋体, SimSun][size=18px]根据《浙江省信息产业质量协会团体标准管理办法(试行)》的相关规定,浙江省信息产业质量协会和浙江省电子信息技术标准化技术委员会对百倍云(浙江)物联科技有限公司[/size][/font][font=宋体, SimSun][size=18px]申报[/size][/font][font=宋体, SimSun][size=18px]的《生态环境监测系统数据稳定性指标及评价方法》,树兰(杭州)医院有限公司申报的《危重患者营养闭环信息管理规范》、《专科病种随访管理系统基本功能规范》和《护理信息系统功能指南》团体标准,经初审和专家评审,符合立项条件,现批准予以立项。请牵头单位组织行业资源,严格按照相关要求抓紧组织实施,严把标准质量关,切实提高标准制订的质量和水平,增强相关标准的适用性和有效性。标准制定过程中如有问题,可联[/size][/font][font=宋体, SimSun][size=18px]系如下:[/size][/font][font=宋体, SimSun][size=18px]联系人:季永炜[/size][/font][font=宋体, SimSun][size=18px]电 话:0571-81029621;18106597787[/size][/font][font=宋体, SimSun][size=18px]E-mail:546725255@qq.com[/size][/font][font=宋体, SimSun][size=18px]联系地址:杭州市西湖区天目山路50号信息技术大厦1007室。[/size][/font][align=right][font=宋体, SimSun][size=18px][/size][/font][/align][align=right][font=宋体, SimSun][size=18px][/size][/font][/align][align=right][font=宋体, SimSun][size=18px][/size][/font][/align][align=right][font=宋体, SimSun][size=18px]浙江省信息产业质量协会[/size][/font][/align][align=right][font=宋体, SimSun][size=18px]2023年4月3日 [/size][/font][/align][font=宋体, SimSun][size=18px][/size][/font]
日前,[b]上海镁锐科技有限公司(下称“镁睿化学”)完成2600万美元A轮融资[/b],本轮融资由启明创投与LYFE Capital共同领投,创新工场与[url=https://www.instrument.com.cn/netshow/SH104757/]镁伽科技[/url]跟投。融资资金将用于进一步完善产品研发,开拓商业市场,支持国际化布局。[align=center][img=,400,168]https://img1.17img.cn/17img/images/202401/uepic/fa955f68-064e-4419-a8d0-d2d26cd5a34e.jpg[/img][/align]镁睿化学成立于2022年1月,由镁伽孵化并完成天使轮投资。公司由一支具有国际跨学科背景的团队创立,致力于通过人工智能化学合成路径规划,及高通量全自动试验室两大技术平台的闭环协同研发,大幅缩短新药研发周期中化学合成环节的交付周期。同时,彻底改变药化合成高度依赖化学家经验设计路径以及手工操作的现状,大幅提高药化合成的生产效率和能源利用率;并大幅降低对环境的污染和对操作人员的危害,实现绿色化学而为客户提供 ESG 价值。[b]镁睿化学通过赋能创新药研发,致力于将更多新药以更快的开发速度造福病患。[/b]目前镁睿化学已经成功完成多个商业订单的超预期交付,得到了海内外客户的高度认可。镁睿化学创始人兼CEO林森博士于 2021 年 9 月开始筹备化学合成自动化智能化创业项目,于 2022 年 1 月与合伙人正式创立镁睿化学。他表示:“非常感谢新老投资人对镁睿化学的支持和认可。镁睿化学成立两年来,在研发成果及商业化落地方面均稳步前进,不断达成新的里程碑。[b]未来我们将继续着力于开发自动化、智能化合成的CRO服务平台,一方面为客户提供降本增效的服务和ESG价值,另一方面,加速赋能创新药研发,解决患者未被满足的用药需求。[/b]”[b]作为此轮融资的领投方之一,启明创投合伙人陈侃博士分析[/b]:“候选药物分子的合成是药物研发过程中的一个关键环节。过去,候选药物分子的合成路径设计以及合成实验操作都是由化学家来做的,其间不乏反复试错的过程,限制了药物研发的快速推进。尽管过去有不少化学逆合成的算法和软件,但因为其建立在有限且粗糙的数据之上,效果不尽如人意。”陈侃博士指出,镁睿化学通过全新的AI算法,结合内部清理、生成的大量专有数据,极大地提高了化学逆合成路径设计的准确性。与此同时,镁睿化学的自动化工作站,能够操控不同类型的起始物料,操作不同类型的化学实验,并且采集多维度的实时数据,极大提升了化学合成的效率,将化学家从常规的实验过程中解放出来,让他们能够思考更具创新性的问题。“我们非常看好镁睿化学建立的这一套[b]‘AI-自动化-化学’[/b]闭环能力,相信它将成为未来化学合成的一个 ‘范式转变’ 的技术,加速药物研发,更快为患者带来疾病治疗的福音。”[b]LYFE Capital投资董事徐婧博士[/b]表示:“化学合成通过智能自动化可以有效降低成本、缩短交付周期,同时更环保和安全,符合产业未来的发展趋势。ChemLex团队拥有强大的海外学术和技术背景,[b]真正实现了AI、自动化和化学合成的紧密结合,在技术方面处于行业领先地位。[/b]我们期待与ChemLex紧密合作,为其在商业化和国际化方面赋能,共同为国内外药企客户提供更高质量和更具性价比的药化合成服务。”[b]创新工场投资董事冯亚东先生[/b]表示:“在科技跨学科交叉越来越频繁的当下,自动化和数字化已经成为了新一代科学研究的‘基建’。而医药行业在这些技术的推动下,也将迎来越来越多的创新和突破。镁睿化学拥有一支经验丰富的跨学科团队,[b]将AI和自动化技术赋能于传统化学合成[/b],致力突破化学合成领域高度劳动密集带来的诸多弊端,大幅提升药物研发的效率并降低成本。我们非常高兴与镁睿化学合作,期待镁睿化学的发展更上一层楼。”[b]镁伽科技创始人兼CEO黄瑜清先生[/b]表示:“镁睿化学是镁伽在化学合成 CRO领域孵化并投资的优秀企业,拥有一支高素质、跨学科的顶尖团队。镁睿化学自成立以来[b]聚焦自动化、AI和化学合成的有机融合[/b],已开发出一系列人工智能模型及高通量自动化系统,将帮助制药企业及科研机构以更高效率、更低成本探索更广阔的可成药化学空间,大幅度缩短药物研发迭代周期。未来镁伽将持续为镁睿化学提供全方位支持,坚持绿色低碳发展的长期主义,为建设更美好更健康的未来世界贡献更多力量。”[b][color=#ff0000]关于启明创投[/color][/b]启明创投成立于2006年,先后在中国上海、北京、苏州、香港及新加坡设立办公室。目前,启明创投旗下管理11只美元基金,7只人民币基金,已募管理资产总额达到95亿美元。自成立至今,专注于投资科技及消费(Technology and Consumer, T&C)、医疗健康(Healthcare)等行业早期和成长期的优秀企业。截至目前,启明创投已投资超过530家高速成长的创新企业,其中有超过200家分别在美国纽交所、纳斯达克,香港交易所,上交所及深交所等交易所上市,或通过并购等方式退出,有70多家企业成为行业公认的独角兽或超级独角兽企业。[b][color=#ff0000]关于LYFE Capital[/color][/b]LYFE Capital是一家全球领先的医疗健康投资平台,在新加坡、美国、中国、韩国设有办公室和团队。LYFE秉持“医疗健康无国界”的信念,选择具有潜力推动医疗健康进步的公司合作,解决全球范围内的未满足需求,利用专业知识和全球资源,在全球范围内投资并为医疗健康公司创造价值。LYFE经验丰富的团队对全球医疗健康行业有着全面的了解,持续携手并赋能被投企业在充满活力的全球市场中最大限度地发挥潜力。[b][color=#ff0000]关于创新工场[/color][/b]创新工场由李开复博士创办于2009年9月,作为国内领先的技术型创业投资机构,创新工场深耕在人工智能与硬科技、机器人与自动化、企业服务软件、医疗科技、可持续科技等领域,并不断探索与创新,致力于打造集创业平台、资金支持、投后服务等的全方位生态投资服务平台。[b][color=#ff0000]关于镁伽科技[/color][/b]镁伽科技成立于2016年,是一家专注提供先进生产力工具的科技公司,致力于通过机器人自动化、人工智能技术与行业应用的深度融合,赋能生命科学、临床诊断、应用化学及先进制造等领域的数字化革新,让世界更健康、更美好。[来源:仪器信息网] 未经授权不得转载[align=right][/align]
高速试验机的加载方式 高速试验机的快速加荷方式,决定了试验机的结构特点、速度范围及经济性,这也是试验机设计和选用的主要依据。材料产生变形时,会受到变形速度的很大影响,特别是非金属高分子材料,如聚合物、增强塑料、合成物等,具有明显的粘弹性,长时、短时、瞬时试样差异很大,常规性能将不再适用。高速拉伸试验机是了解材料特性和变形速度相关性的基本方法之一。高速试验机一般速度可达每秒数米至数百米,国外一些厂家从60 年代就已开始高速拉伸试验机的研制和生产,设计和采用了多种加荷方式,目前国内绝大多数的高速试验机只能用冲击试验机代替或自制较简单的试验装置进行,试验能力有限,条件落后。比较和评价高速试验机,主要从速度、负荷、等速精度、结构复杂程度和经济性等几方面考虑。其中火药爆炸冲击式所能达到的速度最高,一般5--80m/s,高可达300m/s,但火药量控制拉伸速度不够准确,特别是等速精度不易控制。并且机器本身要吸收火药爆炸产生的巨大能量,对冲击部件进行缓冲,因此解构庞大,且试验时有一定危险性(较普通试验机)。飞轮储能式是以机械方式传递速度和功率的,速度易于控制,对凸轮挡块的正确设计可得到近似的等速,因此早期在0.5--30m/s速度范围、负荷10000N范围内,这种加荷方式较普遍,但高速大负荷时,需很大能量补偿拉伸试样变形所消耗的能量,这就需加大飞轮直径、增加质量,增加驱动部件,因此试验机结构庞大,耗能多,所以高速大负荷不宜采用此种方式。气-液加荷式集气体反应快、可膨胀作功和液压易控等优点,与飞轮储能式相比,速度范围相近,负荷范围稍大,但速度可无级调速,等速精度高,且等速段距离长,结构简单、耗能少,目前应用较多,国内也有设计。采用电液伺服控制,技术比较先进,能对输出量进行连续控制,有极快的响应速度,抗负荷刚性大,等速精度高于其它快速加荷方式,元件的功率--重量比大,因此用电液伺服阀构成快速、高精度的闭环控制系统,代表了试验机的先进水平。但这种伺服控制系统复杂,油液过滤精度要求高,元件贵,成本高,另外,闭环控制系统实现高速有一定困难,这些问题有待进一步解决。总之,高速试验机将朝以下几个方向发展:一、有较大的试验速度变化范围,速度调整准确。二、具有高抗负荷刚性,减少试样变形对拉伸速度的影响。三、有控制试样条件的能力,等速控制精度高并不受环境条件影响。
基于相关算法的目标跟踪是利用从以前图像中获得的参考模板,在当前图像中寻找最相似的区域来估计当前目标位置的方法。它对于背景复杂、会有杂波噪声的情况具有良好的效果。CCD(电荷耦合器件)测量技术是近年来发展迅速的一种非接触式测量技术。CCD摄像器件在分辨率、动态范围、灵敏度、实时传输方面的优越性是其它器件无法比拟的,在动态飞行目标跟踪测量中发挥着重要的作用。作者在CCD测量系统中使用相关匹配的方法,实现了对连续视频图像中动态目标的跟踪。1 CCD误差测量系统原理在同一观测位置布置两台CCD,其视轴平行。其中CCD1用于瞄准,CCD2用于跟踪飞行目标。CCD1瞄准线和视轴重合,获得瞄准线和靶标之间的偏差角α。CCD2获得飞行目标和靶标之间的偏差角β。系统要求得到瞄准线和飞行目标之间的水平和垂直方向上的偏差角ψx、ψy。因此规定CCD的视场中均以靶标十字中心为原点,向左和向上为正方向,将α、β分别投影到坐标轴上得到水平和垂直方向上的偏差角αx、αy、βx、βy。两台CCD的视频轴平行,视轴间距远远小于CCD到目标的距离,因此可以认为两CCD的视轴重合。所以有:ψx=αx-βx,ψy=αy-βy (1)图1是系统的原理图,图中靶板上的黑十字是靶标,虚线十字为瞄准分划板在靶板上的投影(由于实际靶板上没有,所以用虚线表示)。2 图像处理算法的选择从系统的原理分析可知,要完成偏差角度的测量首先应当从图像中提取出各个目标在图像中的位置,再根据CCD当量(每像元对应的弧度数)算出水平和垂直方向的偏差角。从CCD1的图像中的最靶标十字和瞄准分划板的位置,从CCD2的图像中提取靶标十字和飞行目标的位置。由于飞行目标几乎贴地飞行,CCD视场中有复杂的地面背景。而且靶标是不发光的暗目标,与背景灰度反差不大,很难将目标从背景中分离出来,因此只有采用相关处理技术来进行目标识别,才能实现瞄准误差和飞行轨迹的测量。相关算法非常适合在复杂背景下识别和跟踪运行目标。由于系统图像处理是事后处理,处理连续的大量视频图像,实时性要求不高,而对处理精度和自动处理程度要求较高,因此采用该算法。本系统中相关处理将预先选定的目标或目标特定位置作为匹配样板,求取模板和输入图像间的相关函数,找出相关函数的峰值及所在位置,求判断输入图像是否包括目标图像及目标位置。3 相关算法的原理及改进在机器识别事务的过程中,常把不同传感器或同一传感器在不同时间、成像条件下对同一景物获取的两幅或多幅图像在空间上对准,或根据已知模式在另一幅图像中寻找相应的模式,这就叫做匹配。如果被搜索图中有待寻的目标,且同模板有一样的尺寸和方向,在图像匹配中使用相关匹配,就是通过相关函数找到它及其在被搜索图中的位置。3.1 相关算法基于相关的目标跟踪寻找最佳匹配点,需要一个从以前图像中得以的模板。在图2中设模板T为一个M×M的参考图像,搜索图S为一个N×N图像(MN),T在S上平移,模板下覆盖的那块搜索图叫做子图Si,j,(i,j)为子图左上角点在S中的坐标,叫参考点。比较T和Si,j的内容。若两者一致,则它们的差为0。用误差的平方和作为它们相似程度的测度:展开公式(2),则有: 公式(3)右边的第三项表示模板的总能量,是一个常数。第一项是模板覆盖下的子图能量,随(i,j)位置而缓慢改变。第二项是子图和模板的互相关,随(i,j)改变。当模板和子图匹配时刻值最大。因此可以用以下相关函数做相似性测度: 根据柯西-施瓦兹不等式可知公式(4)中0R(i,j)≤1,并且仅在Si,j(i,j)/[T(m,n)]为常数时,R(i,j)取最大值(等于1)。相关法求匹配计算量很大,如图2所示的情况,要在(N-M+1)×(N-M+1)个参考位置上做相关计算,每次相关计算要做3M2次加法、3M2次乘法、1次除法、2次开方运算。由于乘除法运算量最大,整个算法的时间复杂度大约为o((N-M+1) ×2×(3M2+1))。整个运算过程中,除了匹配点一点以外,都是在非匹配点上做无用功。但是,模板匹配算法准确度较高,适合对大量的连续视频图像做自动处理。 还有更多的仪器资料,我在这里就不添了,大家感兴趣的话到这个网站上去下载吧!http://www.yiqi120.com/zlzxInfo.asp?id=1678
各位老师好: 我想请教一下,屏蔽圈和石英环更多应用于冷等离子体,还是正常的等离子体呢? 目前知道的是非平衡射频驱动的仪器在使用冷等离子体时,常采用一种屏蔽装置来降低等离子体的电位。屏蔽装置的主要部件是一个不闭合的金属屏蔽圈(中间开裂)。屏蔽圈被置于射频线圈与等离子体炬管之间。当屏蔽圈被接地时,可以避免射频线圈与等离子体炬之间产生的藕合电容,降低等离子体的电位,阻止二次放电。拥有冷等离子体屏蔽装置的仪器常常可以完成冷等离子体与正常热等离子体工作模式之间的切换。 想请各位老师支援一些其他的相关内容,因为要做课件,比较急用,小女子感激不尽。
谁能告诉我怎么调解液相系统适应性!!!!(根据一定的给定条件调解)系统适应性包括哪些方面???还有一个小问题,甲醇怎么超声都有气泡是怎么回事???超声机的问题吗????
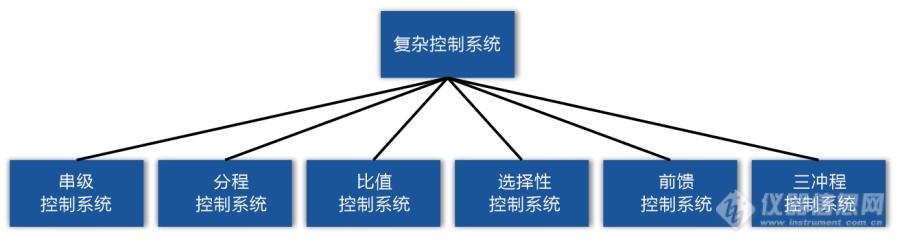
[size=14px][color=#990000]摘要:本文主要针对各种工业生产和仪器设备中的温度、流量、真空、压力和张力等参数的高精度自动控制,介绍了几种常用的复杂控制系统,如串级、分程、比值、前馈-反馈、选择性以及三冲量控制系统。本文主要目的是展示这些复杂控制技术基本概念和结构框图,为后续推出的各种复杂控制用PID调节器做基础技术讲解,以便在实际自动化控制中能充分发挥复杂控制用PID调节器的强大功能。[/color][/size][size=14px][/size][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#990000][b]一、概述[/b][/color][/size][size=14px]控制系统一般又可分为简单控制系统和复杂控制系统两大类,所谓复杂,是相对于简单而言的。凡是多参数,具有两个以上传感器、两个以上调节器或两个以上执行器组成多回路的自动控制系统,通称为复杂控制系统。[/size][size=14px]如图1所示,目前常用的复杂控制系统有串级、分程、比值、前馈-反馈、选择性以及三冲量等几种形式,并且随着生产发展的需要和科学技术进步,还会陆续出现了许多其他新型的复杂控制系统。[/size][align=center][size=14px][img=01.复杂控制器构成,690,187]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141044037509_6178_3221506_3.png!w690x187.jpg[/img][/size][/align][size=14px][/size][align=center]图1 常用的几种复杂控制系统[/align][size=14px][/size][size=14px]本文将针对上述几种复杂控制系统,重点介绍这些复杂控制系统中使用的超高精度PID控制器和典型应用案例,以期提高工程应用的设计效率、提高控制效果和降低成本造价。[/size][size=14px][/size][b][size=18px][color=#990000]二、串级控制(Cascade Control)系统[/color][/size][/b][size=14px][/size][size=14px]串级控制系统是应用最早和最广泛的一种复杂控制系统,它是根据系统结构命名。串级控制系统由两个或两个以上的控制器串联连接组成,一个控制器的输出作为另一个控制器的设定值,这类控制系统称为串级控制系统。[/size][size=14px][/size][size=14px]串级控制系统的特点是将两个PID调节器相串联,主调节器的输出作为副调节器的设定,当被控对象的滞后较大,干扰比较剧烈、频繁时,可考虑采用串级控制系统。特别是需要进行超高精度控制,以及跨参数和跨量程控制时,串级控制系统则能重复发挥其优势。[/size][size=14px][/size][size=14px]串级控制系统广泛应用于温度、真空、流量、压力和张力控制等方面,典型的串级控制系统结构如图1所示。[/size][size=14px][/size][align=center][size=14px][img=02.串级控制系统结构示意图,550,220]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141044355064_2880_3221506_3.png!w690x276.jpg[/img][/size][/align][size=14px][/size][align=center]图2 串级控制系统结构示意图[/align][size=14px][/size][size=14px]如图2所示,串级控制系统包括副控回路(由副调节器、执行器和传感器1组成)和主控回路(由主调节器、副控回路和传感器2组成),主控回路和副控回路以串联形式与被控对象连接,其中副控回路相当于主控回路中的执行器。以下是串级控制系统中各部分的主要功能:[/size][size=14px][/size][size=14px](1)主调节器(主控制器):根据主参数(传感器2测量值)与设定值的偏差而进行PID调节,其输出作为副调节器的设定值。[/size][size=14px][/size][size=14px](2)副调节器(副控制器):其设定值由主调节器的输出决定,并根据副参数(传感器1测量值)与给定值(即主调节器输出)的偏差进行PID调节。[/size][size=14px][/size][size=14px](3)副回路(内回路):由副参数(传感器1)、副调节器及所包括的一部分被控对象所组成的闭环回路(随动回路)[/size][size=14px][/size][size=14px](4)主回路(外回路):将副回路看做是一个执行器,则主参数(传感器2)、主调节器、副回路及被控对象组成的闭环回路(主动回路)。[/size][size=14px][/size][size=14px](5)主对象(被控对象、惰性区):主参数(一般为传感器2)所处的那一部分工艺设备,它的输入信号为副变量,输出信号为主参数(主变量)。[/size][size=14px][/size][size=14px](6)副对象(导前区):副参数所处的那一部分工艺设备,它的输入信号为主调节量,其输出信号为副参数(副变量)。[/size][size=14px][/size][size=14px]串级控制系统是在单回路控制结构上增加了一个随动的副回路,因此,与单回路控制相比有以下几个特点:[/size][size=14px][/size][size=14px](1)对进入副回路的扰动具有较迅速和较强的克服能力。[/size][size=14px][/size][size=14px](2)可以改善对象特性,特别是能提高控制精度和工作效率。[/size][size=14px][/size][size=14px](3)可消除副回路的非线性特性的影响。[/size][size=14px][/size][size=14px](4)可实现夸参数和夸量程的控制。[/size][size=14px][/size][size=14px](5)串级控制系统具有一定的自适应能力。[/size][size=14px][/size][size=14px]二、分程控制(Split-Range Control)系统[/size][size=14px][/size][size=14px]简单控制系统就是一个调节器的输出驱动一个执行器动作,而分程控制系统的特点是一个调节器的输出同时驱动几个工作范围不同的执行器。[/size][size=14px][/size][size=14px]通常,在一个简单控制系统中,一个调节器的输出信号只控制一个执行器,其结构与特性如图3(a)所示。如果一个调节器的输出信号同时送给两个执行器,这就是一种分程控制系统。这里两个执行器并联使用,其工作特性如图3(b)所示。[/size][size=14px][/size][align=center][size=14px][img=03.分程控制系统结构和特性示意图,690,310]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141045391335_1640_3221506_3.png!w690x310.jpg[/img][/size][/align][size=14px][/size][align=center]图3 简单(a)和分程(b)控制系统结构和特性示意图[/align][size=14px][/size][size=14px]分程控制已经广泛应用在温度、流量和压力控制等工业流程当中,也通常用来控制双模式的运行场合。例如,分程控制被用在保持一个既有加热控制又有冷却控制的容器内的温度。当其温度(单一测量值)低于目标温度设定值时,首先关闭冷却装置,然后开始打开加热装置。当温度上升到设定值以上时,首先关闭加热装置,然后开始打开冷却装置。另外一种分程控制方式是,采用分段量程控制来调整两个执行器从而实现更大范围内的操作。一个执行器控制低量程范围,另一个执行器控制高量程范围。以上两种应用场合都要求在每一个流程管线上配备一个执行器。[/size][size=14px][/size][size=14px]分程控制的典型应用是聚合反应工艺、冷热循环浴、TEC半导体温度控制、动态平衡法的真空和压力控制等。[/size][size=14px][/size][b][size=18px][color=#990000]三、比值控制(Ratio Control)系统[/color][/size][/b][size=14px][/size][size=14px]为保持两种或两种以上变量比值为恒定的控制叫比值控制。在炼油、化工、燃烧、制药、造纸和晶体生长等生产过程中,经常要求两种或两种以上的物料或工作气体按一定比例混合后进行工作。一旦比例失调,就会影响生产的正常运行,影响产品质量,甚至发生生产事故。[/size][size=14px][/size][size=14px]在比值控制系统中,一个变量需要跟随另一变量变化。前者称为从动量S,后者称为主动量M,比值K=M/S。通常选择的主动量应是系统中主要的物料或关键物料的相关变量,它们通常是可测不可控。常见的比值控制系统有单闭环比值、双闭环比值、串级比值(变比值)三种。[/size][size=14px][/size][size=14px][color=#990000][b]3.1 单闭环比值控制系统[/b][/color][/size][size=14px][/size][size=14px]单闭环比值控制系统结构如图4所示。[/size][size=14px][/size][align=center][size=14px][img=单闭环比值控制系统结构框图,600,236]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141046030140_8657_3221506_3.png!w690x272.jpg[/img][/size][/align][size=14px][/size][align=center]图4 单闭环比值控制系统结构框图[/align][size=14px][/size][size=14px]单闭环比值控制系统的优点是不但能实现从动量跟踪主动量变化,而且能克服从动量干扰等。结构简单,能确保比值不变,是应用最多的方案。但缺点是主动量不受控。[/size][size=14px][/size][size=14px]如图2和图4所示,单闭环比值控制系统与串级控制非常相似,但它们的不同之处在于:[/size][size=14px][/size][size=14px](1)单闭环比值控制系统无主对象,即主动量不受控,并且从动量不会影响主动量。[/size][size=14px][/size][size=14px](2)串级控制系统中,副变量是操纵变量到被控变量之间总对象的一个中间变量,该副变量是主对象的输入,通过改变副被控变量来调节主被控变量。[/size][size=14px][/size][size=14px](3)串级控制的副控回路与比值控制系统的从动量控制子系统都是随动控制系统。[/size][size=14px][/size][size=14px](4)比值控制系统中,从动量控制系统是随动控制系统,其设定值由系统外部的主调节器提供,其任务就是使从动量尽可能地保持与设定值相等,随着主动量的变化,始终保持主动量与从动量的比值关系。[/size][size=14px][/size][size=14px](5)在系统稳定时,该比值是比较精确的,在动态过程中,比值关系相对不够精确。[/size][size=14px][/size][size=14px](6)当主动量处于不变状态时,从动量控制系统又相当于一个定值控制系统。[/size][size=14px][/size][size=14px][b][color=#990000]3.2 双闭环比值控制系统[/color][/b][/size][size=14px][/size][size=14px]在主动量也需要控制时,增加一个主动量闭环控制系统,单闭环比值控制系统成为双闭环比值控制系统,双闭环比值控制系统结构如图5所示。[/size][size=14px][/size][align=center][size=14px][img=双闭环比值控制系统结构框图,600,313]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141046526180_3146_3221506_3.png!w690x360.jpg[/img][/size][/align][size=14px][/size][align=center]图5 双闭环比值控制系统结构框图[/align][size=14px][/size][size=14px]双闭环比值控制系统的优点是:能克服主动量扰动,实现其定值控制。从动量控制回路能抑制作用于副回路中的扰动,使从动量与主动量成比值关系。当扰动消除后,主动量和从动量都恢复到原设定值上,其比值不变,并且主动量和从动量都变化平稳。当系统需要改变时,只要改变主动量的设定值,主动量和从动量就会按比例同时增加或减小,从而克服了上述单闭环比值控制系统的缺点。[/size][size=14px][/size][size=14px]双闭环比值控制系统常用于主动量和从动量扰动频繁,工艺参数经常需要改变,同时要求系统总参数恒定的工艺过程,如无此要求,可采用两个单独的闭环控制系统来保持比值关系。[/size][size=14px][/size][size=14px]在采用双闭环比值控制方案时,对主动量控制器的参数整定应尽量保证其输出为非周期变化,以防止共振的产生。[/size][size=14px][/size][size=14px][b][color=#990000]3.3 变比值控制系统[/color][/b][/size][size=14px][/size][size=14px]当系统中存在着除主动量和从动量干扰外的其他干扰,为了保证产品质量,必须适当修正两变量的比值。因此,出现了按照一定工艺指标自动修正比值系数的变比值控制系统。变比值控制系统要求两个变量的比值能灵活低地随第三变量的需要而进行调整,由此可见,变比值控制系统是一个以第三个变量为主变量、以其他两个变量比值为副变量的串级控制系统,有时变比值控制系统也成为串级比值控制系统。在变比值控制系统中,比值只是一种手段,不是最终目的,而第三变量往往是产品质量或工艺指标。[/size][size=14px][/size][size=14px]同样,变比值控制系统也可以有单闭环和双闭环形式,如图6所示。[/size][size=14px][/size][align=center][size=14px][img=变比值控制系统结构示意图,650,717]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141048070661_493_3221506_3.png!w690x762.jpg[/img][/size][/align][size=14px][/size][align=center]图6 变比值控制系统结构框图:(a)单闭环结构;(b)双闭环结构[/align][align=center][size=14px][/size][/align][b][size=18px][color=#990000]四、前馈控制(Feedforward Control)系统[/color][/size][/b][size=14px][/size][size=14px]简单控制系统一般都属于反馈控制(feedback control),是按被控变量与设定值的偏差进行控制,因此只有在偏差产生后,调节器才对操纵变量进行控制,以补偿扰动变量对被控变量的影响。若扰动已经产生,而被控量尚未发生变化,反馈控制作用是不会产生的,所以,这种控制作用总是落后于扰动作用的,是不及时的控制。[/size][size=14px][/size][size=14px]由此,依据预防控制策略设计的控制系统称为前馈控制系统。前馈控制系统是根据扰动或给定值的变化按补偿原理来工作的控制系统,其特点是当扰动产生后,被控变量还未变化以前,根据扰动作用的大小进行控制,以补偿扰动作用对被控变量的影响。前馈控制系统运用得当,可以使被控变量的扰动消灭在萌芽之中,使被控变量不会因扰动作用或给定值变化而产生偏差,它较之反馈控制能更加及时地进行控制,并且不受系统滞后的影响。采用前馈控制系统的条件是:[/size][size=14px][/size][size=14px](1)扰动可测但不可控。[/size][size=14px][/size][size=14px](2)变化频繁且变化幅度大的扰动。[/size][size=14px][/size][size=14px](3)扰动对被控变量的影响显著,反馈控制难以及时克服,且过程控制精度要求又十分严格的情况。[/size][size=14px][/size][size=14px]前馈控制的好处是直接控制无滞后,可以提高系统的响应速率,但是需要比较准确地知道被控对象模型和系统特性。而反馈控制的优点是不需要知道被控对象的模型即可实现比较准确的控制,但是需要偏差发生之后才能进行调节,具有滞后性。所以,理论上把前馈和反馈结合起来,既能实现较高的控制精度,也能提高系统响应速度。需要注意的是:前馈控制属于开环控制,反馈控制属于闭环控制。[/size][size=14px][/size][size=14px]前馈反馈控制系统有两种结构形式,一种是前馈控制作用与反馈控制作用相乘;另一种是前馈控制作用与反馈控制作用相加,这是前馈反馈控制系统中最典型的结构形式。典型的前馈-反馈控制系统结构如图7所示。[/size][size=14px][/size][align=center][size=14px][img=前馈-反馈控制系统结构框图,550,251]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141048430650_3026_3221506_3.png!w690x315.jpg[/img][/size][/align][size=14px][/size][align=center]图7 前馈-反馈控制系统结构框图[/align][size=14px][/size][size=14px]在高精度控制中,前馈控制可用来提高系统的跟踪性能。经典控制理论中的前馈控制设计是基于复合控制思想,当闭环系统为连续系统时,使前馈环节与闭环系统的传递函数之积为1,从而实现输出完全复现输入。从图7中可以发现,前馈环节的传递函数是被控对象的倒数。那么就是在使用前馈控制前需要对被控对象的模型有了解,才能有针对性的设计出合适的前馈控制器。也就说,每个系统的前馈控制器都是不一样的,每个前馈控制器都是专用的。[/size][size=14px][/size][b][size=18px][color=#990000]五、选择性控制(Selective Control)系统[/color][/size][/b][size=14px][/size][size=14px] 选择性控制系统也叫超驰控制系统,也可称为自保护系统或软保护系统。选择性控制是把生产过程中对某些工业参数的限制条件所构成的逻辑关系迭加到正常的自动控制系统上去的组合控制方案。系统由正常控制部分和取代控制部分组成,正常情况下正常控制部分工作,取代控制部分不工作;当生产过程某个参数趋于危险极限时但还未进人危险区域时,取代控制部分工作,而正常控制部分不工作,直到生产重新恢复正常,然后正常控制部分又重新工作。这种能自动切换使控制系统在正常和异常情况下均能工作的控制系统叫选择性控制系统。[/size][size=14px][/size][size=14px]通常把控制回路中有选择器的控制系统称为选择性控制系统。选择器实现逻辑运算,分为高选器和低选器两类。高选器输出是其输入信号中的高信号,低选器输出是其输入信号中的低信号。根据选择器在系统结构中的位置不同,选择性控制系统可分为两种:[/size][size=14px][/size][size=14px](1)选择器位于两个调节器和一个执行器之间,选择器对两个调节器输出信号进行选择,如图8(a)所示。这种选择性控制系统的主要特点是:两个调节器共用一个执行器。在生产正常情况下,两个调节器的输出信号同时送至选择器,选出正常调节器输出的控制信号送给执行器,实现对生产过程的自动控制,此时取代调节器处于开路状态,对系统不起控制作用。当生产不正常时,通过选择器选出取代调节器代替正常调节器对系统进行控制。此时,正常调节器处于开路状态,对系统不起控制作用。当系统的生产情况恢复正常,通过选择器的自动切换,仍由原正常调节器来控制生产的正常进行。[/size][size=14px][/size][align=center][size=14px][img=选择性控制系统结构框图,690,547]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141049190661_493_3221506_3.png!w690x547.jpg[/img][/size][/align][size=14px][/size][align=center]图8 选择性控制系统结构框图[/align][size=14px][/size][size=14px](2)选择器位于调节器之前,对传感器输出信号进行选择的系统,如图8(b)所示。该选择性系统的特点是几个传感器合用一个调节器。通常选择的目的有两个,其一是选出最高或最低测量值;其二是选出可靠测量值。[/size][size=14px][/size][size=14px]在图8(a)所示的选择性控制系统中,由于系统中总有一台控制器处于开环状态,因此易产生积分饱和。防积分饱和有限幅法、外反馈法、积分切除法三种。[/size][size=14px][/size][b][size=18px][color=#990000]六、三冲量控制(Three Impulse Control)系统[/color][/size][/b][size=14px][/size][size=14px]三冲量控制系统是来自电厂锅炉给水自动调节系统的一个名词,是根据汽包液位、给水流量和蒸汽流量三冲量经PID计算来调节给水阀门开度,从而达到自动控制汽包液位的目的。[/size][size=14px][/size][size=14px]所谓冲量,实际就是变量,多冲量控制中的冲量,是指控制系统的测量信号。三冲量控制意味着对三个变量进行测量和控制从而使得其中一个变量达到稳定。[/size][size=14px][/size][size=14px]一般而言,如图9所示,三冲量控制系统从结构上来说,是一个带有前馈控制的串级控制系统。以液位控制为例,主调节器(液位控制器)与副调节器(流量控制器)构成串级控制系统。汽包液位(传感器2)是主变量、给水流量(传感器1)是副变量。副变量的引入使系统对给水压力的波动有较强的克服能力。蒸汽流量(传感器3)的波动是引起汽包液位变化的因素,是干扰作用,蒸汽波动时,通过引入前馈调节器,使给水流量(传感器1)作相应的变化,所以这是按干扰进行控制的,是把蒸汽流量信号作为前馈信号引入控制的。[/size][size=14px][/size][align=center][size=14px][img=三冲量控制系统结构框图,690,371]https://ng1.17img.cn/bbsfiles/images/2022/10/202210141049398083_4900_3221506_3.png!w690x371.jpg[/img][/size][/align][size=14px][/size][align=center]图9 三冲量控制系统结构框图[/align][size=14px][/size][b][size=18px][color=#990000]七、总结[/color][/size][/b][size=14px][/size][size=14px]综上所述,在复杂控制系统中可能有几个过程测量值、几个PID控制器以及不止一个执行器;或者尽管主控制回路中被控量、PID控制器和执行器各有一个,但还有其他的过程测量值、运算器或补偿器构成辅助控制系统,这样主、辅控制回路协同完成复杂控制功能。复杂控制系统中有几个闭环回路,因而也是多回路控制系统。[/size][size=14px][/size][size=14px]另外,随着技术的进步,越来越多的生产、工艺和设备仪器对自动化控制要求越来越高,对于被控对象比较特殊,被控量不止一个,生产工艺对控制品质的要求比较高或者被控对象特性并不复杂,但控制要求却比较特殊,如超高精度,这些都需要复杂控制系统予以解决。[/size][size=14px][/size][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=14px][/size][size=14px][/size]
大家好,我现在用美国药典做一个产品的分析时,流动相中含有辛基磺酸钠,在做系统适应性实验时,连续进了五针,发现每针之间的RSD 2.%,而且每一针的保留时间提前,分析度下降。流动相走了半天后再次测试还是这样。看来不是系统没有稳定的原因。我换别的色谱柱分析时也还是有这样的问题。请大家帮助解决一下。
经常有童鞋问,这个液相的”系统适应性”是什么东东呢,怎么做的呢?系统适应性是在每天运行样品之前,需要做的一系列测试,保证系统运行正常,结果可靠。就相当于对系统作一个mini版的认证,保证当天的分析结果准确有效,别人能认可。这里的系统,包括了仪器软硬件,分析方法,样品制备,分析方法等等等等.各种法规都有相关的指导,但是也都没有给出特别具体的怎么做的步骤. 我们先来看看这些高屋建瓴地指导法规吧.1.USP(United States Pharmacopeia)是怎么说的呢? “System suitability tests are an integral part of gas and liquid chromatographic methods. They are used to verify that the resolution and reproducibility of the chromatographic system are adequate for the analysis to be done. The tests are based upon the concept that the equipment, electronics, analytical operations, and samples to be analyzed constitute an integral system that can be evaluated as such.”大概意思是说:系统适应性(System Suitability)是气相和液相色谱方法的重要组成部分,用来确认色谱系统的分离度和重复性能够满足当前分析的要求。测试基于的原则是:整个系统是由仪器,电路,分析方法和样品所组成的,我们可以每个每个地去测试, 但我们更要将其作为一个整体去测试,从而验证整个系统的状态。 这也是为什么做了仪器的硬件,软件认证(Compliance),还要做系统适应性的原因:因为你需要将包含了仪器软硬件,方法,样品等这些方面的整个系统作为一个整体,再进行测试。接着USP还提到了柱效(column efficiency)和分离度(Resolution)作为参考指标,但是没有给出具体的参数要求。对于精确度(Precision)来说,USP提出:“Unless otherwise specified in the individual monograph, data from five replicate injections of the analyte are used to calculate relative standard deviation (SR) if the requirement is 2.0% or less; data from six replicate injections are used if the relative standard deviation requirement is more than 2.0%.”出了精确度的测试以外,USP没有给出其他任何具体的测试参考条件。但是,USP告诉我们,一定要做系统适应性的测试,否则,这台仪器做出的数据一律无效。2.ICH(The International Conference on Harmonization of Technical Requirements for Registration of Pharmaceuticals for Human Use)是怎么说的?在章节 ” Q2B: Validation of Analytical Procedures: Methodology” 中, 提到:“System suitability testing is an integral part of many analytical procedures. The tests are based upon the concept that the equipment, electronics, analytical operations, and samples to be analyzed constitute an integral system that can be evaluated as such. System suitability test parameters to be established for a particular procedure depend upon the type of procedure being validated. See pharmacopeias for additional information.”基本跟USP说的差不多,也没啥具体的东西。只是ICH也同意,一定要将系统作为整体来测试。3.FDA(The United States Food and Drug Administration)是怎么说的?FDA在其指导文件” Guidance for Industry: Bioanalytical Method Validation”中只提到一句:“System suitability: Based upon the analyte and technique, a specif
1. 同时支持IPAD平板电脑、安卓平板电脑、射频触摸屏、windows电脑控制(笔记本、台式机、一体机等),一个设计器支持所有平台,并且IPAD平板、安卓平板、射频触屏及windows电脑的控制界面完全相同,方便用户使用。多种方式,可同时使用,互为备份,让项目更健壮。中控系统,会议中控系统,多媒体中控系统,智能中控系统,IPAD中控系统,混合矩阵,高清混合矩阵,会议中控,多媒体中控2. 非网页式,各个平台(IPAD、安卓、windows)都有功能一致的专用操控软件,更显专业,易用,稳定。3. IPAD控制软件,通过美国苹果公司官方严格审核,可直接在app store上安装,确保稳定兼容,不需越狱,不需破解。4. 采用字体自动识别技术,在Windows电脑上设计界面时使用的任何字体,都能在IPAD平板、安卓平板上正确显示(不需制作图片)。5. 编程设计平台可自动生成各种3D按钮(不需设计图片);也支持图片按钮,支持PNG、WMF、ICO、GIF图片的透明效果,可实现任意形状的按钮,各种效果的界面。6. 设计平台采用先进的软件技术,不需使用任何电脑语言进行编程,不需使用各种复杂的逻辑模块与宏,以方便施工、后期维护及升级。7. 程序设计师勿需亲自到现场,可直接通过以太网络,利用Internet互联网传输来更改程序的内容。8. 专为高要求级场合设计,非电教中控改装,主机配有16个RS232串口、8个RS485\422、8个红外口、8-Relays 继电器口等控制口。不集成小矩阵等信号切换系统,增强控制接口,以降低整个系统崩溃的风险。9. 主机内置红外学习器,可把红外数据保存到电脑成为红外库文件,供后续工程或后续维护升级使用。10. 控制通讯:以太网(TCP/IP),10/100M自适应,TCP SERVER方式,也可定制为UDP方式,也可连接射频接收器。11. 处理器:双处理器。采用2颗嵌入式高速中央处理器(CPU)并行运算,可快速处理各种复杂的控制指令,提高响应用户的速
为了让大家正确安全的使用闭口闪点仪,现在由小编为大家详细介绍闭口闪点测定仪的特点:闭口闪点测定仪依据GB/T261-2008、GB/T21615-2008、ASTM D93及欧盟REACH法规等标准设计生产,是测定 石油产品闭口闪点的新型仪器。全自动闭口闪点测定仪采用新型的生产技术,具有方便快捷,开放式、模块化结构, 广泛应用于电力,铁路,石油,化工,航空行业及科研部门。 1、采用新型高速数字信号处理器,工作可靠精度高; 2、检测、开盖、点火、报警、冷却、打印,整个实验过程自动完成; 3、大气压自动检测,自动修正测试结果,可用于高海拔地区; 4、采用新研制的大功率高频开关电源加热技术,加热效率高,采用自适应PID控制算法,自动调节升温曲线; 5、温度超值自动停止检测并报警; 6、待时间标记的历史记录,最多存储500个; 7、热敏式尾行打印机,使得打印更美观更快捷,具有脱机打印功能; 8、带温度补偿的百年历时钟,走时准确,自动记录测定的日期和事件,在掉电的状态下可运行10年以上; 9、采用320*240大屏幕图形LCD显示屏,汉字显示界面,内容丰富; 10、采用全触摸屏按键,操作直观方便; 以上是几点关于全自动闭口闪点测定仪特点的详细介绍,相信大家对全自动闭口闪点测定仪有了更深的了解,在以后的工作中,有不小的帮助本文是转载发表
各位高手帮我分析一下: 今天下午做一个产品的测试前系统适应性,HPLC仪器.发现有两个相邻的杂质峰的分离度达不到2.0,只有1.68(文件要求大于2.0) 而且用的是新买的柱子(已经润洗了一个晚上).请问是什么原因?如何提高这两个杂质峰之间的分离度.与流动相,缓冲液的PH值有关吗?与样品的配置浓度有关吗?







 我要推广仪器
我要推广仪器
 下载APP
下载APP