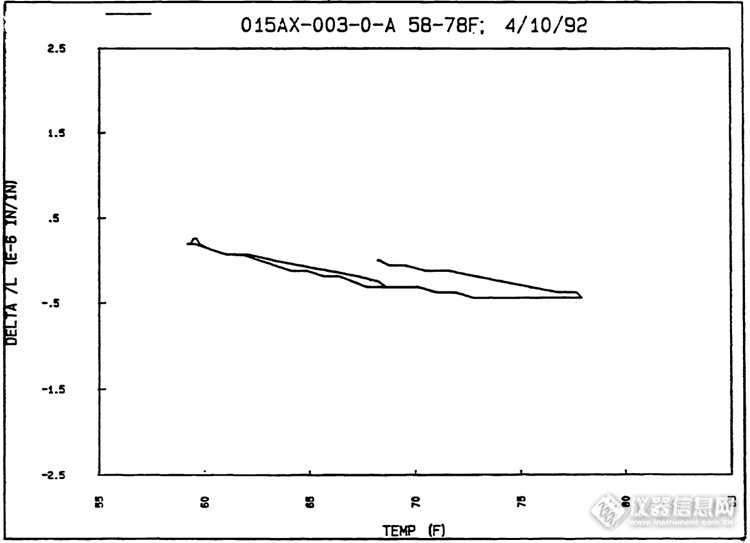
摘要:航天器用各种大尺寸构件都普遍要求超低膨胀系数以保证构件尺寸的稳定性,传统热膨胀系数测试只针对长度100mm以下的小试样,已无法满足长度1m以上大尺寸构件的超低热膨胀系数测量,多数航天器用大尺寸构件需要精确测量整个构件的超低热膨胀系数。本文对美国波音公司在太空望远镜大尺寸桁架超低热膨胀系数整体测量方面的研究工作进行了综述,以了解国外技术发展状况,给今后开展此方面工作提供参考和借鉴。1. 前言 在太空运行的各种航天器,由于没有大气层的保护,其环境温度变化很大,受阳面温度可高达上百摄氏度,而被阳面温度却在零下几十摄氏度。因此,航天器在空间环境中,由于材料的热膨胀,会引起航天器结构的尺寸变化。但是从航天器的某些部件和仪器的技术要求考虑,希望航天器的某些结构的稳定性要好,这一点对通讯卫星天线结构及敏感元件、太空望远镜的镜筒支架等的使用和安装尤为重要。尤其是卫星和望远镜桁架结构更要求其在一定的环境温度变化范围内不因热应力产生变形或者变形极小,即所谓零膨胀。 传统热膨胀系数测试只针对长度100mm以下的小试样,已无法满足大尺寸构件的超低热膨胀系数测量。为适应航天器制造的要求,特别是对于以1m以上长度的E-08/K量级材料热膨胀系数需要更加准确的测试。因此,研究航天器用复合材料工程构件的超低膨胀测试方法和相应的测试设备,具有重要的科学意义和实用价值。 本文将介绍美国波音公司在太空望远镜桁架超低热膨胀系数测试方法和测试设备方面所开展的工作。2. 波音公司激光干涉法第一代热膨胀系数测试技术 早在1971年波音公司的Bond等人就开始研究一种用于监测大直径天线在空间模拟腔体内动态行为的多通道激光干涉法测试技术【1】,其中采用了可反转条纹计数技术来测量安装在试验箱体外测量装置与安装在腔体内天线上7个光学反射镜之间的距离。 试验腔外测试仪器距离腔体内部天线的距离将近5m,干涉仪采用了Twyman-Green干涉仪,其中参考光束的相位在13.5kHz频率处进行调节以便对每个通道进行可反转条纹计数,每根条纹计数对应的距离变化增量为7.9nm(0.125倍激光波长),整个光学系统结构如图 2-1所示。 http://ng1.17img.cn/bbsfiles/images/2016/10/201610252327_615105_3384_3.png图 2-1 多通道激光干涉仪光学系统结构示意图 基于上述技术,波音航空公司在1974年至1975年期间针对大型空间望远镜(LST)项目中的石墨环氧测量支架进行了热膨胀系数测试考核【2】。具体测试考核包括了两方面的内容,一方面是测试管状支架和H型支架的热膨胀系数,另一方面是对管状支架热膨胀系数进行了热循环效应考核。 热膨胀系数测试试件为91.44厘米长的截面分别为圆形和H型的管材,被测试件放置在真空腔内并稳定24小时后再进行测试,图 2-2所示为测试装置的结构示意图。如图所示,被测试件悬浮在含有加热套的真空腔内,激光干涉仪的光学部件放置在真空腔外的底部位置,形成立式结构热膨胀系数测量装置,用来测量试件长度变化的聚焦光束垂直进入真空腔底部的光学窗口,整个测量装置实物如图 2-3所示,激光干涉仪测量装置实物如图 2-4所示。 http://ng1.17img.cn/bbsfiles/images/2016/10/201610252327_615106_3384_3.png图 2-2 热膨胀系数测试系统结构示意图http://ng1.17img.cn/bbsfiles/images/2016/10/201610252327_615107_3384_3.png图 2-3 热膨胀系数测试系统整体照片http://ng1.17img.cn/bbsfiles/images/2016/10/201610252328_615108_3384_3.png图 2-4 热膨胀系数测试系统激光干涉仪测量装置 每个被测试件上安装了三只测温热电偶和四个角反射镜,如图 2-5所示。激光干涉仪测量得到四个角反射镜的位移变化,由此得到热变形量和监视试件的倾斜。在被测试件的顶部安置一个参考反射镜用来抵消被测试件和干涉仪之间相对运动所带来的影响。 测试中真空腔内部气压低于1Torr以下并使真空度稳定16个小时,然后使试件温度升到37.8℃(100℉)后在冷却下来,整个加热冷却过程中,每隔2.8℃(5℉)测试一次热变形量,每隔14℃(25℉)进行一次30分钟的恒温。整个温度变化过程直到试件冷却到-73.3℃(-100℉)停止。 http://ng1.17img.cn/bbsfiles/images/2016/10/201610252328_615109_3384_3.png图 2-5 热膨胀系数测试系统测温传感器和光学器件安装位置示意图 铺层方向为(02±50)s 的管状试件热变形量测试结果如图 2-6所示,整个过程的平均线膨胀系数为 7.2E-08/℃(4E-08/℉)。图 2-7所示为管状构件热膨胀系数测试与计算之间的比较结果,从比较结果可以看出板层方向的有效性,这种特性可以用来设计特殊性能的复合材料。 在进行管件热膨胀系数热循环考核试验中,先沿着试件长度方向上安装两只1英寸宽的电阻加热器以建立起与热真空试验相同的试件状态,在热真空试验中,电阻加热器是用来控制管件的温度,而在管件热膨胀系数热循环试验中,加热电阻器只是实现相同的结构状态,热循环试验的温度控制则是采用真空腔内的加热套来实现。 http://ng1.17img.cn/bbsfiles/images/2016/10/201610252328_615110_3384_3.png图 2-6 试件热变形量随温度变化的测试结果http://ng1.17img.cn/bbsfiles/images/2016/10/201610252329_615111_3384_3.png图 2-7 测试与设计结果的比较 在热膨胀系数热循环考核试验中,反射镜和温度传感器的安装与热膨胀系数测试时完全相同。热循环测试时也是先抽真空使得试件进行一两天的除湿,然后进行+38℃~-78℃(+100℉~-100℉)温度范围内的208次的冷热循环,大约间隔50次循环进行一次测量,在最后一次循环时,测试将电阻加热器取出后的试件热膨胀系数。热循环过程中试件的热膨胀系数随温度变化测量结果如图 2-8所示。 http://ng1.17img.cn/bbsfiles/images/2016/10/201610252329_615112_3384_3.png图 2-8 热循环过程中试件热膨胀系数随温度变化的测量值[/
[table][tr][td][align=left][color=#333333] 摩擦学是一门研究物体相对运动时其表面摩擦、润滑、磨损三者间相互关系的交叉学科,摩擦学实验研究的重点和难点之一在于对磨损量的定量分析。磨损量涵盖了磨损区的轮廓尺寸、粗糙度、体积这线、面、体三个维度方面的参数,量级从纳米到毫米不等,又由于不可破坏性测量,传统的低精度接触式轮廓仪和影像仪无法适用,而以白光干涉为原理、具备高精度、非接触式测量能力的[/color][url=http://www.chotest.com][b][color=#000000]白光干涉仪[/color][/b][/url][color=#333333]登上了摩擦学研究的舞台。[/color][/align][align=center][color=#333333][img=,658,496]http://www.chotest.com/Upload/2018/8/201808238760989.jpg[/img][/color][/align][align=center][color=#333333][img=,639,260]http://www.chotest.com/Upload/2018/8/201808231572145.jpg[/img][/color][/align][align=center][color=#333333]图1 工作中的CSM摩擦磨损测试仪[/color][/align][align=left][color=#333333] 上图展示的是一款工作中的CSM摩擦磨损测试仪,经过十数小时的摩擦,铜板表面出现了一圈圈摩擦痕迹,即为磨损区域,对磨损区域进行尺寸上的定量分析,是研究的重要组成部分,下面我们使用中图仪器白光干涉仪对一块经过摩擦试验处理的铜板进行线、面、体三个维度的定量分析。[/color][/align][align=left][color=#333333]一、一维:线_轮廓尺寸[/color][/align][align=left][color=#333333] 取一块摩擦处理过的铜板,使用白光干涉仪对其中未摩擦过的光滑区域和摩擦过的磨损区域进行扫描,获取其3D图像。[/color][/align][align=center][color=#333333][img=,621,240]http://www.chotest.com/Upload/2018/8/201808239913954.jpg[/img][/color][/align][align=center][color=#333333][img=,548,171]http://www.chotest.com/Upload/2018/8/201808234541029.jpg[/img][/color][/align][align=center][color=#333333]图5 磨损区的剖面轮廓曲线[/color][/align][align=left][color=#333333] 从图中可以看到,相对光滑区细致较浅的划痕,磨损区充满了坑坑洼洼的槽,在磨损区3D图像上提取一条剖面轮廓曲线,可以获取槽深和槽宽的轮廓尺寸数据。[/color][/align][align=left][color=#333333]二、二维:面_粗糙度[/color][/align][align=left][color=#333333] 分别在光滑区和磨损区选取若干点,测量分析显示经过摩擦磨损试验过的区域线粗糙度和面粗糙度均增大了至少十几倍。[/color][/align][align=center][color=#333333][img=,495,157]http://www.chotest.com/Upload/2018/8/201808235791766.jpg[/img][/color][/align][align=center][color=#333333]图6 光滑区域粗糙度[/color][/align][align=center][color=#333333][img=,472,143]http://www.chotest.com/Upload/2018/8/201808237197020.jpg[/img][/color][/align][align=center][color=#333333]图7 磨损区域粗糙度[/color][/align][align=left][color=#333333]三、三维:体_体积[/color][/align][align=center][color=#333333][img=,642,234]http://www.chotest.com/Upload/2018/8/201808238604911.jpg[/img][/color][/align][align=center][color=#333333]图8 磨损区3D图像&孔洞体积测量[/color][/align][align=left][color=#333333] 如右上图,利用分析工作“孔洞体积”对磨损区进行区域体积分析。在选择的分析区域中,位于基准面(蓝色方框)上面的顶点区域显示为红色,位于基准面下方显示为绿色,利用“孔洞体积”分析工具可直接获取该区域内上下两部分的面积、体积、深度数据。[/color][/align][align=left][color=#333333] 一线二面三体,白光干涉仪能让研究人员掌握三个维度精确的数据信息,从而对摩擦磨损区进行全面的分析判断,如同穿上了酷炫的滑板鞋,在摩擦学研究这个舞台秀出华丽的舞步。[/color][/align][/td][/tr][/table]

激光干涉仪具有测量精度高、测量范围大、测量速度快、最高测速下分辨率高等优点,结合不同的光学镜组,可实现线性测长、角度、直线度、垂直度、平行度、平面度等几何参量的高精度测量。在SJ6000激光干涉仪动态测量软件配合下,可实现线性位移、角度和直线度的动态测量与性能检测,以及进行位移、速度、加速度、振幅与频率的动态分析,如振动分析、丝杆导轨的动态特性分析、驱动系统的响应特性分析等。[align=center][img=,578,450]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201754505855_5264_3712_3.jpg!w578x450.jpg[/img][/align] 激光干涉仪最典型的应用就是测量机床精度,本文讲解如何使用激光干涉仪测量五轴机床平移轴直线度误差。 对于平移轴而言,每根轴均有两个直线度误差,因此三根轴有六个直线度误差,均可采用激光干涉仪分别测得。 原理:带有圆孔的是直线度干涉镜,其与待测轴相连一同运动;长条镜是直线度反射镜静止安装,其是对称结构,上下左右均对称。当一束激光从源头发出射入干涉镜,干涉镜将光束分成两束,形成一个很小的角度分别去往反射镜,由于反射镜上下对称,因此两束光被反射后又回到干涉镜,汇合成一股光束,去往激光头的探测器。当运动轴产生直线度误差时,会使得干涉镜相对于反射镜在水平横向方向发生相对运动,而反射镜是左右对称的(左右的镜片不在同一平面,有一定的角度),因此会使得两束分开的光束光程具有差别,根据此差别,即可测得运动轴产生的直线度误差。[align=center][img=,678,333]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755021895_7221_3712_3.jpg!w678x333.jpg[/img][/align][align=center]▲ 直线度测量的光路原理构建图[/align][align=center][img=,678,367]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755111914_6482_3712_3.jpg!w678x367.jpg[/img][/align][align=center]▲ 运动轴的横向直线度测量示意图[/align][align=center][img=,678,367]https://ng1.17img.cn/bbsfiles/images/2019/11/201911201755345695_9383_3712_3.jpg!w678x367.jpg[/img][/align][align=center]▲ 运动轴的纵向直线度测量示意图[/align] 根据直线度误差测量原理可知,测量过程中不可避免的会引入斜率误差。该误差是由于测量直线度反射镜的光学轴线最初与待测轴不平行,为调整平行而引起的。如图 所示,A 为干涉镜和反射镜的距离,B 为激光头到干涉镜的距离(其中干涉镜是固定在运动轴上的)。在一开始,反射镜的光学轴线处于旋转前的位置,而由于机床运动轴与其之间存在的夹角θ,[img]http://www.chotest.com/Upload/2019/10/201910173125514.jpg[/img][align=center][img]http://www.chotest.com/Upload/2019/10/201910177031118.png[/img][/align] 因为斜率误差是稳定误差,因此可以采取上述的公式将其从直线度测量结果中分离出来,亦可以采用两端法拟合或者最小二乘法拟合将其分离出去。 两端法拟合:即是将所有采集来的数据第一点和最后一点相连决定一直线,再将所有采集来的数据去除掉拟合的直线信息,由此得出的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910170000002.png[/img][/align]最小二乘法拟合:将采集回来的所有数据通过最小化误差的平方和方式来寻找数据的最佳函数匹配,而后将采集值与匹配函数对应值相比较,剩余的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910171562522.png[/img][/align]附:SJ6000激光干涉仪直线度测量精度。[table][tr][td][align=center]轴向量程[/align][/td][td][align=center]测量范围[/align][/td][td][align=center]测量精度[/align][/td][td][align=center]分辨力[/align][/td][/tr][tr][td][align=center]短距离[/align][/td][td][align=center](0.1~4.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(0.5+0.25%R+0.15M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.01μm[/align][/td][/tr][tr][td][align=center]长距离[/align][/td][td][align=center](1.0~20.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(5.0+2.5%R+0.015M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.1μm[/align][/td][/tr][tr][td=5,1]注:R为显示值,单位:μm;M为测量距离,单位:m[/td][/tr][/table]
激光干涉仪是以激光波长为已知长度,利用迈克耳逊干涉系统测量位移的通用长度测量,具有高强度、高度方向性、空间同调性、窄带宽和高度单色性等优点。测量长度的激光干涉仪,主要是以迈克尔逊干涉仪为主,并以稳频氦氖激光为光源,构成一个具有干涉作用的测量系统。 激光干涉仪采用一个双光束激光头和一个双通道的处理器,采用飞行采样方式,在测量过程中无须停机采样检测,节约了测量时间和编程时间;利用RENISHAW动态特性测量与评估软件,可进行机床振动测试与分析,滚珠丝杠的动态特性分析,伺服驱动系统的响应特性分析。激光干涉仪的激光头和靶标反射镜二件之间只要发生相对位移就能进行测量,测量系统中无须分光镜、所以对光极其方便。 激光干涉仪可配合各种折射镜、反射镜等来作线性位置、速度、角度、真平度、真直度、平行度和垂直度等测量工作,并可作为精密工具机或测量仪器的校正工作。激光干涉仪可用来精确测量和校准机床、三座标测量机和X-Y平台的机械精度,也测量轴的定位精度、重复定位精度及反向间隙,测量轴的角偏、直线度,测量平台的平面度。

[color=#990000]摘要:本文针对航天器尺寸高稳定性复合材料桁架结构的热变形测试,从样品的热膨胀系数测试到桁架全场大尺寸热变形测试,全方位提出了相应的解决方案。特别针对激光干涉法在大气环境下的高精度热变形测量,介绍了上海依阳公司开展的方案性试验结果,证明了激光干涉法完全可以用于大气环境下的位移测量,尽管测量精度有所降低,但完全可以满足百纳米量级的全场热变形测量,同时也证明了此方案的可行性,为打通整个技术路线奠定了基础。 [/color][color=#990000]关键词:尺寸稳定性,桁架,激光干涉法,热变形,热膨胀系数,航天器[/color][align=center][img=,690,387]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232018598367_8587_3384_3.jpg!w690x387.jpg[/img][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][color=#990000][b]1. 引言[/b][/color] 从目前公开报道的相关文献来看,国内在航天器尺寸高稳定性复合材料桁架结构热变形测量方面还刚刚起步,还没找到有效可行的测试技术方向和手段,而对于尺寸高稳定性复合材料桁架的热变形测试,需要满足以下几方面的要求: (1)为长期控制结构在轨期间的变形,除需测量材料的热膨胀系数之外,还需测量材料的湿热膨胀系数。 (2)为进一步降低复合材料的热膨胀系数,并获得超稳定的结构,还需深入研究复合材料的铺层设计、热膨胀系数的预测方法,同时提高样品级别的热膨胀系数测量准确性,要具备测量热膨胀系数1~5×10-8/K范围的能力。 (3)为进一步提高复合材料桁架结构整体变形测量的准确性、减小测量不确定度,需具备模拟空间环境的真空(低气压)条件下的原位测量能力,利用真空环境消除或减弱热对流所带来的不确定度。更准确的说,要对大尺寸桁架结构0.1 um的总变形量要有准确的测试能力。 本文针对上述要求,从样品的热膨胀系数测试到桁架全场大尺寸热变形测试,全方位提出了相应的解决方案。特别针对激光干涉法在大气环境下的高精度热变形测量,介绍了上海依阳公司开展的方案性试验结果,证明了激光干涉法完全可以用于大气环境下的位移测量,尽管测量精度有所降低,但完全可以满足百纳米量级的全场热变形测量。同时也证明了此方案的可行性,为打通整个技术路线奠定了基础。[b][color=#990000]2. 技术方案[/color][/b] 技术方案主要针对材料样品和整体桁架两个尺度级别的测试进行设计。样品级别的热膨胀和湿膨胀系数测试还采用顶杆法,整体桁架的热变形和热膨胀系数采用目前位移测量精度最高的激光干涉法,并实现激光干涉法既可以在大气环境下又可以在真空环境下进行测量。整体技术方案如图2-1所示。[align=center][img=,500,354]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232024059437_8538_3384_3.png!w690x489.jpg[/img][/align][color=#990000][/color][align=center][color=#990000]图2-1 热变形测试技术方案框图[/color][/align][color=#990000]2.1. 顶杆法高精度热膨胀系数测试方案[/color] 为了实现样品级别的高精度-8量级热膨胀系数测量,测试方案包括以下几方面的内容: (1)采用传统顶杆法进行样品级别的热膨胀系数测量,顶杆的作用是将样品的尺寸变化传递出来,而不是非接触式激光干涉法直接对镜面样品表面进行测量。选择顶杆法的目的是降低样品制作难度和测量光路的调整难度。 (2)顶杆法超低热膨胀系数测量装置放置在放置在大气环境中,由此在实现变温测量的同时,还可以进行变湿测量。另外,在大气环境下样品的辐射加热速度要比真空条件下快很多,这使得大气环境下的测试效率远高于真空条件下的测试。 (3)普通热膨胀仪中的顶杆材料一般选用的是热膨胀系数为5.3×10-7/K的熔融石英,这限制了顶杆法热膨胀仪的测试能力。在±50℃范围内,可选用热膨胀系数小于1×10-8/K零膨胀材料,并结合基线修正,可使顶杆法具有非常高的测量精度。 (4)在±50℃范围内,样品温度的热电偶测温传感器和电加热控制方式很容易造成将近1℃的测量不确定度,室温附近热物理性能测试的最大误差源往往都是温度项。为此选用高精度的液体循环浴加热方式和热敏电阻温度传感器,可大幅度降低温度项误差。 (5)热膨胀测试中的位移传感器直接选用绝对测量的激光干涉仪,这样可以保证几个纳米的测量精度(不是分辨率)。 (6)在超低热膨胀系数测试中,位移传感器随环境温度变化所带来的影响非常明显,所有高精度的位移传感器都有温漂指标。为此,要对位移传感器采取恒温措施,根据不同位移传感器的温漂指标确定传感器环境温度的稳定性和恒温手段。[color=#990000]2.2. 激光干涉法全场测试方案[/color] 为了实现尺寸高稳定性复合材料桁架结构的全场热变形测量,如图2-1所示,测试方案选择采用激光干涉测试技术,这主要是基于以下几方面原因: (1)激光干涉测试技术是目前工程应用中测量精度最高的成熟技术,由于是基于波长长度的测量,所以激光干涉法是一种绝对测试方法,比较容易实现几个纳米的位移测量精度。 (2)目前成熟的激光干涉测试技术,既可以测量热变形位移,又同时可以测量角度变化,非常适合桁架结构的全场热变形测量。 (3)目前成熟的激光干涉测试技术已经解决了以往激光干涉法测量对环境振动的苛刻要求问题,不再需要特殊和昂贵的抗震减震措施,在普通实验室的一般隔振台上就可以进行高精度测量。 激光干涉法全场测试方案是基于真空条件下的全场热变形测试,整个测试系统主要由真空系统、试验系统和测量系统三部分组成,整个测试系统放置在气浮隔振台上,如图2-2所示。[align=center][img=,690,274]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232024226897_8935_3384_3.png!w690x274.jpg[/img][/align][color=#990000][/color][align=center][color=#990000]图2-2 真空型激光干涉法桁架全场热变形测试系统结构示意图[/color][/align] 在实际测试过程中,根据被测对象情况,将激光干涉仪的分布位置设计为双端和单端测量布局两种形式。 双端测量布局形式如图2-3所示。[align=center][color=#990000][img=,690,246]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232137181177_6207_3384_3.png!w690x246.jpg[/img][/color][/align][color=#990000][/color][align=center][color=#990000]图2-3 双端测量结构示意图[/color][/align] 双端测量布局具有以下特点: (1)光程差小,两端反射镜平行度要求不高,有利于保证测量精度。 (2)多通道测量和扩展成本高,两台干涉仪只能测量一个试样。 单端测量布局形式如图2-4所示。[align=center][color=#990000][img=,690,439]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232137381187_8450_3384_3.png!w690x439.jpg[/img][/color][/align][color=#990000][/color][align=center][color=#990000]图2-4 单端测量结构示意图[/color][/align] 单端测量布局具有以下特点: (1)光程差大(试件长度),两反射镜平行度要求高,可能会带来一定误差。 (2)优点是便于今后多通道测量和扩展,一台激光器可带三台干涉仪进行三个试件测量。 (3)关键是可以进行空载测量,确定系统误差。 总之,对于尺寸高稳定性复合材料桁架结构的热变形高精度测量,采用真空型激光干涉法基本是国际上的主流测试方法,而且基本都是采用上述单端测量结构形式,由此可实现模拟空间真空环境的航天器桁架的原位热变形准确测量。 尽管真空型激光干涉法可以实现很高精度的热变形原位测量,且非常适合航天器桁架结构的整体性能评价和考核,但在实际应用中还存在以下几方面的不足: (1)为满足庞大尺寸的航天飞行器桁架结构热变形测试,需要将整个桁架结构件完整放置在相应庞大的真空腔体内,并需要对真空腔体的光学窗口和真空度进行长时间的精确控制,以消除真空度变化带来的一系列影响,这使得整个测试系统非常复杂和造价昂贵。 (2)在真空环境下热传递速度很慢,桁架的整体加热和控温方式很容易造成温度不均匀,而且桁架温度达到稳定需要漫长的恒温时间。因此对于大尺寸桁架的热变形测试需要采用分区加热方式,这造成加热系统也非常复杂,且恒温时间同样的漫长。 (3)真空型激光干涉法测试系统的兼容性和灵活性较弱,需要采用巨大的真空腔体才能满足各种尺寸规格桁架的热变形测试,相应的调试工作量巨大。 综上所述,对于航天器尺寸高稳定性复合材料桁架的热变形测量,特别是对于桁架管材和整体结构的研制和考核,更大的需求是测试简便快速、覆盖广和造价低的大气环境下的激光干涉法测试系统,在测量精度上至少要比国内目前采用的数字散斑法提高1~2个数量级。[b][color=#990000]3. 大气环境下激光干涉法位移测量试验考核[/color][/b] 在大气环境下,大气中气体的波动会造成激光波长的改变,从而影响激光干涉法测量的准确性和稳定性,且非常容易造成试验过程中断,因此绝大多数激光干涉法测量基本都是在精确真空度控制条件下进行。 为了考核大气环境下激光干涉法测量的准确性和稳定性,采用激光干涉仪位移测量系统,并结合各种不同的实验环境和密封手段,对不同光程长度进行了测试。[color=#990000]3.1. 可行性试验装置和方法[/color] 可行性试验装置是在一个可拆装式木箱中放入一块0.6 m左右的石英板,石英板上分别放置参考反射镜和测量反射镜,并在石英板一侧固定激光器和干涉仪,整个木箱放置在气悬浮隔振台上,整个装置结构如图3-1所示。[align=center][color=#990000][img=,690,305]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232025524053_1160_3384_3.png!w690x305.jpg[/img][/color][/align][color=#990000][/color][align=center][color=#990000]图3-1 可行性考核试验装置结构示意图[/color][/align] 为考核方案的可行性,设计了两种测量模式,如图3-2所示。[align=center][color=#990000][img=,690,215]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232026226487_6991_3384_3.png!w690x215.jpg[/img][/color][/align][color=#990000][/color][align=center][color=#990000]图3-2 测量模式示意图[/color][/align] 在空载测量模式下,测量光和参考光都照射在一个平面反射镜上,这时激光干涉仪的位移测量值应为零。空载测量模式常用来考核激光干涉仪的系统测量误差,即考核各种试验环境条件对激光干涉仪位移测量的影响。 在差分测量模式下,测量光和参考光分别照射在测量反射镜和参考反射镜上,两反射镜之间的距离变化量就代表被测物热变形大小,由此来考核大气环境下空气波动对激光干涉仪位移测量稳定性的影响。[color=#990000]3.2. 考核测试条件和结果[/color] 为了模拟不同大气环境条件,设计了以下几种试验环境,如表3-1所示。[align=center][color=#990000]表3-1 大气环境试验条件[/color][/align][align=center][img=,690,202]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232026395370_1501_3384_3.png!w690x202.jpg[/img][/align] 在以上测试环境条件下,分别进行空载和差分两种模式测量,每种模式下的测试持续15分钟(选择更长测试时间会受到环境温度变化带来的影响),并进行多次重复测量,计算出不同环境条件和测量模式下的测量误差平均值。测量结果如表3-2所示。[align=center][color=#990000]表3-2 考核试验结果[/color][/align][align=center][img=,690,323]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232026537688_1320_3384_3.png!w690x323.jpg[/img][/align] 由表3-2所示的测试结果可以看出,通过增加密闭形式的木箱,可以大幅度降低空调和大气环境对测量带来的影响,在狭窄的密闭空间内,即使是大气环境下也能达到纳米量级的测量精度,由此证明了密闭容器大气环境下采用激光干涉法测量热变形技术方案的可行性。[color=#990000][b]4. 参考文献[/b][/color] (1)刘国青, 阮剑华, 罗文波, 白刚. 航天器高稳定结构热变形分析与试验验证方法研究. 航天器工程, 2014, 23(2):64-70. (2)马立, 杨凤龙, 陈维强, 齐卫红,李艳辉. 尺寸高稳定性复合材料桁架结构的研制. 航天器环境工程, 2016, 33(3).[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][align=center] [img=,690,215]https://ng1.17img.cn/bbsfiles/images/2019/01/201901232023218793_4119_3384_3.png!w690x215.jpg[/img][/align]
[table][tr][td][align=left][color=#333333] “摩擦,摩擦,在这光滑的地上摩擦…..”还记得庞麦郎的一首《我的滑板鞋》风靡大街小巷,广场上卷起了一股溜滑板鞋的浪潮。尔今浪潮已退,但摩擦声却未消失,作为一柄对社会发展起着双刃剑作用的武器,各大高校和科研机构一直都在对摩擦学进行着持续的研究,而中图仪器[b]SuperView W1白光干涉仪[/b],就是该领域最时尚的滑板鞋,载着研究人员疾驰,手持武器,所向披靡。[/color][/align][align=left][color=#333333] 摩擦学是一门研究物体相对运动时其表面摩擦、润滑、磨损三者间相互关系的交叉学科,摩擦学实验研究的重点和难点之一在于对磨损量的定量分析。磨损量涵盖了磨损区的轮廓尺寸、粗糙度、体积这线、面、体三个维度方面的参数,量级从纳米到毫米不等,又由于不可破坏性测量,传统的低精度接触式轮廓仪和影像仪无法适用,而以白光干涉为原理、具备高精度、非接触式测量能力的白光干涉仪登上了摩擦学研究的舞台。[/color][/align][align=center][color=#333333][img=,658,496]http://bbs.21ic.com/data/attachment/forum/201908/20/173108zmy3uxwyyf44pvay.jpg[/img][/color][/align][align=center][color=#333333][img=,639,260]http://bbs.21ic.com/data/attachment/forum/201908/20/173108wggtggagt4vy684g.jpg[/img][/color][/align][align=center][color=#333333]图1 工作中的CSM摩擦磨损测试仪[/color][/align][align=left][color=#333333] 上图展示的是一款工作中的CSM摩擦磨损测试仪,经过十数小时的摩擦,铜板表面出现了一圈圈摩擦痕迹,即为磨损区域,对磨损区域进行尺寸上的定量分析,是研究的重要组成部分,下面我们使用中图仪器[b]SuperView W1白光干涉仪[/b]对一块经过摩擦试验处理的铜板进行线、面、体三个维度的定量分析。[/color][/align][align=left][color=#333333]一、一维:线_轮廓尺寸[/color][/align][align=left][color=#333333] 取一块摩擦处理过的铜板,使用[b]SuperView W1白光干涉仪[/b]对其中未摩擦过的光滑区域和摩擦过的磨损区域进行扫描,获取其3D图像。[/color][/align][align=center][color=#333333][img=,621,]http://bbs.21ic.com/data/attachment/forum/201908/20/173109uq6666gog6pg2h8q.jpg[/img][/color][/align][align=center][color=#333333][img=,548,]http://bbs.21ic.com/data/attachment/forum/201908/20/173109tzxq34yyc522tj4j.jpg[/img][/color][/align][align=center][color=#333333]图5 磨损区的剖面轮廓曲线[/color][/align][align=left][color=#333333] 从图中可以看到,相对光滑区细致较浅的划痕,磨损区充满了坑坑洼洼的槽,在磨损区3D图像上提取一条剖面轮廓曲线,可以获取槽深和槽宽的轮廓尺寸数据。[/color][/align][align=left][color=#333333]二、二维:面_粗糙度[/color][/align][align=left][color=#333333] 分别在光滑区和磨损区选取若干点,测量分析显示经过摩擦磨损试验过的区域线粗糙度和面粗糙度均增大了至少十几倍。[/color][/align][align=center][color=#333333][img=,495,]http://bbs.21ic.com/data/attachment/forum/201908/20/173109n3blb9399tawzdkk.jpg[/img][/color][/align][align=center][color=#333333]图6 光滑区域粗糙度[/color][/align][align=center][color=#333333][img=,472,]http://bbs.21ic.com/data/attachment/forum/201908/20/173109itiu8uaizt5ti8f5.jpg[/img][/color][/align][align=center][color=#333333]图7 磨损区域粗糙度[/color][/align][align=left][color=#333333]三、三维:体_体积[/color][/align][align=center][color=#333333][img=,642,]http://bbs.21ic.com/data/attachment/forum/201908/20/173110iuynrork3en0offq.jpg[/img][/color][/align][align=center][color=#333333]图8 磨损区3D图像&孔洞体积测量[/color][/align][align=left][color=#333333] 如右上图,利用分析工作“孔洞体积”对磨损区进行区域体积分析。在选择的分析区域中,位于基准面(蓝色方框)上面的顶点区域显示为红色,位于基准面下方显示为绿色,利用“孔洞体积”分析工具可直接获取该区域内上下两部分的面积、体积、深度数据。[/color][/align][align=left][color=#333333] 一线二面三体,[b]SuperView W1白光干涉仪[/b]能让研究人员掌握三个维度精确的数据信息,从而对摩擦磨损区进行全面的分析判断,如同穿上了酷炫的滑板鞋,在摩擦学研究这个舞台秀出华丽的舞步。[/color][/align][/td][/tr][/table]
白光干涉仪目前在3D检测领域是精度最高的测量仪器之一,在同等系统放大倍率下检测精度和重复精度都高于共聚焦显微镜和聚焦成像显微镜,在一些纳米级和亚纳米级的超精密加工领域,除了[url=http://www.chotest.com/detail.aspx?cid=686][b][color=#333333]白光干涉仪[/color][/b][/url],其它的仪器无法达到其测量精度要求。[align=center][img]http://www.chotest.com/Upload/2018/3/201803076710554.jpg[/img][/align][align=center]中图仪器SuperView W1白光干涉仪[/align]白光干涉仪测量原理: 白光干涉仪是利用光学干涉原理研制开发的超精密表面轮廓测量仪器。照明光束经半反半透分光镜分威两束光,分别投射到样品表面和参考镜表面。从两个表面反射的两束光再次通过分光镜后合成一束光,并由成像系统在CCD相机感光面形成两个叠加的像。由于两束光相互干涉,在CCD相机感光面会观察到明暗相间的干涉条纹。干涉条纹的亮度取决于两束光的光程差,根据白光干涉条纹明暗度以及干涉条纹出现的位置解析出被测样品的相对高度。[align=center][img]http://www.chotest.com/Upload/2019/5/201905302500097.jpg[/img][/align]白光干涉仪的测量应用: 以测量单刻线台阶为倒,在检查仪器的各线路接头都准确插到对应插孔后,开启仪器电源开关,启动计算机,将单刻线台阶工件放置在载物台中间位置,先手动调整载物台大概位置,对准白光干涉仪目镜的下方。 在计算机上打开白光干涉仪测量软件,在软件界面上设置好目镜下行的最低点,再微调镜头与被测单刻线台阶表面的距离,调整到计算机屏幕上可以看到两到三条干涉条纹为佳,此时设置好要扫描的距离。按开始按钮,白光干涉仪可自动进行扫描测量,测量完成后,转件自动生成3D图像,测量人员可以对3D图像进行数据分析,获得被测器件表面线、面粗糙度和轮廓的2D、3D参数。[align=center][img]http://www.chotest.com/Upload/2019/5/201905303281565.png[/img][/align] 白光干涉仪具有测量精度高、操作便捷、功能全面、测量参数涵盖面广的优点,测量单个精密器件的过程用时2分钟以内,确保了高款率检测。白光干涉仪独有的特殊光源模式,可以广泛适用于从光滑到粗糙等各种精密器件表面的测量。
SJ6000激光干涉仪具有测量精度高、测量范围大、测量速度快、最高测速下分辨率高等优点,结合不同的光学镜组,可实现线性测长、角度、直线度、垂直度、平行度、平面度等几何参量的高精度测量。在[b]SJ6000[color=#333333]激光干涉仪[/color][/b]动态测量软件配合下,可实现线性位移、角度和直线度的动态测量与性能检测,以及进行位移、速度、加速度、振幅与频率的动态分析,如振动分析、丝杆导轨的动态特性分析、驱动系统的响应特性分析等。[align=center][img]http://www.chotest.com/Upload/2019/9/201909243125960.png[/img][/align] 激光干涉仪最典型的应用就是测量机床精度,本文讲解如何使用激光干涉仪测量五轴机床平移轴直线度误差。 对于平移轴而言,每根轴均有两个直线度误差,因此三根轴有六个直线度误差,均可采用激光干涉仪分别测得。 原理:带有圆孔的是直线度干涉镜,其与待测轴相连一同运动;长条镜是直线度反射镜静止安装,其是对称结构,上下左右均对称。当一束激光从源头发出射入干涉镜,干涉镜将光束分成两束,形成一个很小的角度分别去往反射镜,由于反射镜上下对称,因此两束光被反射后又回到干涉镜,汇合成一股光束,去往激光头的探测器。当运动轴产生直线度误差时,会使得干涉镜相对于反射镜在水平横向方向发生相对运动,而反射镜是左右对称的(左右的镜片不在同一平面,有一定的角度),因此会使得两束分开的光束光程具有差别,根据此差别,即可测得运动轴产生的直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910178906394.jpg[/img][/align][align=center]▲ 直线度测量的光路原理构建图[/align][align=center][img]http://www.chotest.com/Upload/2019/10/201910170468304.png[/img][/align][align=center]▲ 运动轴的横向直线度测量示意图[/align][align=center][img]http://www.chotest.com/Upload/2019/10/201910173593913.png[/img][/align][align=center]▲ 运动轴的纵向直线度测量示意图[/align] 根据直线度误差测量原理可知,测量过程中不可避免的会引入斜率误差。该误差是由于测量直线度反射镜的光学轴线最初与待测轴不平行,为调整平行而引起的。如图 所示,A 为干涉镜和反射镜的距离,B 为激光头到干涉镜的距离(其中干涉镜是固定在运动轴上的)。在一开始,反射镜的光学轴线处于旋转前的位置,而由于机床运动轴与其之间存在的夹角θ,[img]http://www.chotest.com/Upload/2019/10/201910173125514.jpg[/img][align=center][img]http://www.chotest.com/Upload/2019/10/201910177031118.png[/img][/align] 因为斜率误差是稳定误差,因此可以采取上述的公式将其从直线度测量结果中分离出来,亦可以采用两端法拟合或者最小二乘法拟合将其分离出去。 两端法拟合:即是将所有采集来的数据第一点和最后一点相连决定一直线,再将所有采集来的数据去除掉拟合的直线信息,由此得出的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910170000002.png[/img][/align]最小二乘法拟合:将采集回来的所有数据通过最小化误差的平方和方式来寻找数据的最佳函数匹配,而后将采集值与匹配函数对应值相比较,剩余的残值即为直线度误差。[align=center][img]http://www.chotest.com/Upload/2019/10/201910171562522.png[/img][/align]附:SJ6000激光干涉仪直线度测量精度。[table][tr][td][align=center]轴向量程[/align][/td][td][align=center]测量范围[/align][/td][td][align=center]测量精度[/align][/td][td][align=center]分辨力[/align][/td][/tr][tr][td][align=center]短距离[/align][/td][td][align=center](0.1~4.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(0.5+0.25%R+0.15M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.01μm[/align][/td][/tr][tr][td][align=center]长距离[/align][/td][td][align=center](1.0~20.0)m[/align][/td][td][align=center]±3mm[/align][/td][td][align=center]±(5.0+2.5%R+0.015M[size=12px]2[/size]) μm[/align][/td][td][align=center]0.1μm[/align][/td][/tr][tr][td=5,1]注:R为显示值,单位:μm;M为测量距离,单位:m[/td][/tr][/table]
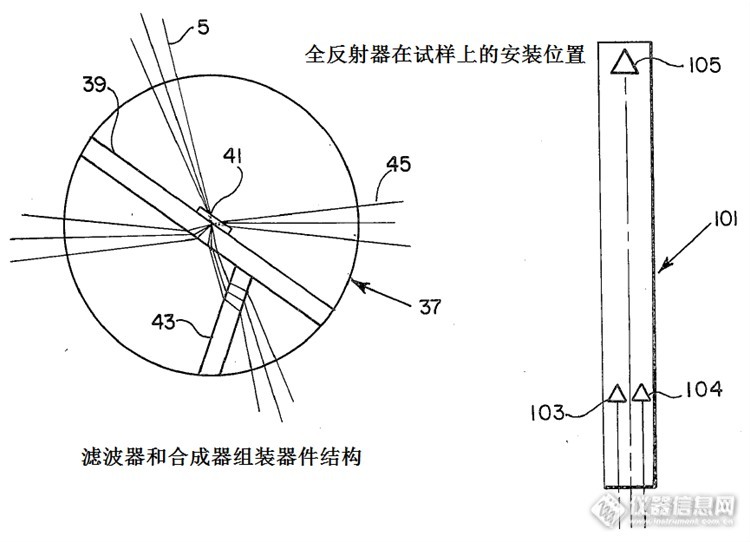
摘要:航天器用各种大尺寸构件都普遍要求超低膨胀系数以保证构件尺寸的稳定性,传统热膨胀系数测试只针对长度100mm以下的小试样,已无法满足大尺寸构件的超低热膨胀系数测量,需要精确测量整个构件的超低热膨胀系数。本文对国外在大尺寸构件热膨胀系数整体测量方面的研究工作进行了综述,以了解国外技术的发展状况,给今后开展此方面工作提供参考和借鉴。1. 前言 在太空运行的各种航天器,由于没有大气层的保护,其环境温度变化很大,受阳面温度可高达上百摄氏度,而被阳面温度却在零下几十摄氏度。因此,航天器在空间环境中,由于材料的热膨胀,会引起航天器结构的尺寸变化。但是从航天器的某些部件和仪器的技术要求考虑,希望航天器的某些结构的稳定性要好,这一点对通讯卫星天线结构及敏感元件、太空望远镜的镜筒支架等的使用和安装尤为重要。尤其是卫星和望远镜桁架结构更要求其在一定的环境温度变化范围内不因热应力产生变形或者变形极小,即所谓零膨胀。 传统热膨胀系数测试只针对长度100mm以下的小试样,已无法满足大尺寸构件的超低热膨胀系数测量。为适应航天器制造的要求,特别是对于以m为长度单位的E-08/K量级材料热膨胀系数需要更加准确的测试。因此,研究航天器用复合材料工程构件的超低膨胀测试方法和相应的测试设备,具有重要的科学意义和实用价值。 本文将介绍国外在工程构件级热膨胀系数测试方法和测试设备方面所开展的工作。2. 波音公司激光扫描干涉仪在大尺寸桁架热变形测试中的应用 美国波音公司的Bond等人在1971年首次报道了多通道激光干涉仪监测大直径天线在空间模拟腔体内的热应变动态行为和大尺寸桁架热膨胀系数的测试,经过将近20年的研究并经历了三代技术的迭代,在1990年研发出扫描式激光干涉仪并在工程中得到应用。有关波音公司在多通道激光干涉仪技术上的发展进程参见文献,这里不再进行详细介绍,本文主要概述波音公司扫描式激光干涉仪在大尺寸构件热膨胀系数测试中的应用。 美国波音公司多通道激光干涉仪技术经历了三代技术发展,尽管可以实现多通道的测试,但每个通道都需要独立的光路和相应光学器件,特别在多通道同时测试时会存在众多光束和配置众多器件,这种光路和器件上的复杂性给实际工程实现带来很大困难。为此,Bond等人又开发了一种扫描式激光干涉仪并获得了专利。 扫描式激光干涉仪在理想情况下,扫描干涉仪应包含连续激光源、将激光分离为参考光和信号光的分光器以及由信号控制的信号光偏光器。所产生的控制信号致使大多数偏转信号光具有连续性,从而使得每一束偏转的信号光都指向相应的测量位置。在每个测量位置处将会对入射的偏转后的信号光进行反射从而形成反射信号光。每一束反射后的信号光与参考光重合产生干涉条纹,光电探测器读取干涉条纹形成相应的条纹信号,信号处理装置对每一束偏转信号光的条纹信号进行周期性测量,最终得出每个测量位置上位移。 一般情况下,每束反射光将会产生9条反射后的信号光束,其中包含了相应测量位置点的位置和取向信息。混合光则将每一束反射后信号光与参考光进行混合并产生一个干涉条纹图案,探测装置包含了9个光电探测器来测量相应干涉图案中相应点的辐照度并产生相应的条纹信号,信号处理器则会周期性的测量每个条纹信号的相移,从而得到测量位置处的位移变化量。如果进一步的发展,干涉仪可以设法在相应的第一和第二频率处对信号光和参考光进行调制,信号处理后所得到的参考信号的频率等于第一和第二频率之差。 这种扫描式激光干涉仪的光路俯视图如图 2-1所示,这种扫描式激光干涉仪的光路设计可以用来对放置在密闭环境12中试件10的热变形进行测量,特别是这种干涉仪测试光路设计还适合用于测量试件10上21-24位置处的相对位移,由此可见这种干涉仪可以很方便的扩展用于测量10个以上位置的相对位移。http://ng1.17img.cn/bbsfiles/images/2016/10/201610311050_615393_0_3.png图 2-1 波音公司激光扫描干涉仪光路结构示意图 激光器30发出一连续激光束32,激光束32穿过旋转偏振器34形成新的光束36,光束36穿过偏振光分光器38被分割为参考光束40和信号光束42。采用旋转偏振器34的目的是实现参考光和信号光相对光强的调整而不用对光学器件进行重新准直。参考光束40经过声光调制器(AOM)50形成调制后的参考光束52,参考光束52经过一系列反射镜54-56照射到声光偏转器(AOD)90。 同时,信号光束42经过声光调制器(AOM)60形成调制后的信号光束62,信号光束62穿过中继透镜照射到半波片66,半波片66改变信号光束62为水平偏振光以匹配参考光束的偏振方向。改变为水平偏振方向的信号光62经过中继反射镜68和70进入过滤/合成器80。过滤/合成器80包含一个作为空间过滤器或光束清洁器使得信号光空间连续性更好作用的椭圆微型反射镜。经过空间过滤后的信号光62经微型反射镜反射后通过透镜84和反射镜86照射到声光偏转器(AOD)90。 声光偏转器(AOD)90经信号控制将信号光62在水平面内偏转成四束信号光束91-94,同时声光偏转器(AOD)90还将参考光52偏转为四束参考光96-99。虽然偏转后的参考光束与偏转后的信号光都偏转了相同角度,但由于反射镜56略微处于反射镜86上方使得偏转后的信号光与参考光并未重叠,如图 2-2所示,因此偏转后的参考光束96-99全部照射在球面反射镜100上并全部按照原光路全部返回AOD 90中。AOD 90将这些反射回的参考光全部转换为一单数参考光72。球面镜100的取向确定需要使得反射回的参考光72位置略微高于经反射镜56反射的入射过来的参考光52。参考光72经过中继反射镜74和76的反射进入并透过透镜组78进入滤波/合成器80。在这种光路安排中,参考光两次通过AOD 90以便补偿信号光在AOD中的频率漂移。http://ng1.17img.cn/bbsfiles/images/2016/10/201610311050_615394_0_3.png图 2-2 声光偏转器光路示意图 偏转的信号光束91-94经过球面反射镜100上方照射到中继反射镜111-114上,通过这些中继反射镜,偏转后的信号光束91-94分别依次指向试件10上的21-24位置所对应的测量结构件121-124。偏转后的信号光束91经反射镜111、反射镜130、透镜组132、反射镜134和反射镜136照射到测量结构件121处。采用同样方式,偏转后的信号光束92经过反射镜112、反射镜138、透镜组140和反射镜142照射到测量结构件122处。偏转后的信号光束93经过反射镜113、透镜组144、反射镜146和反射镜148照射到测量结构件123处。最终,偏转后的信号光束94经过反射镜114、透镜组150、反射镜152和反射镜154照射到测试结构件124处。这样每个测量结构件中121-124处都会接收到一束偏转后的信号光,由此共产生9束偏转后的信号光,这9束信号光将按照原光路返回到AOD 90中。这9束由测量结构件121-124产生的偏转后的信号光分别被指定编号为101-104。AOD 90将产生9束偏转后信号光束经反射镜86反射后形成一组信号光116并通过透镜组84进入滤波/合成器80,并在滤波/合成器80中的微型反射镜上形成9束信号光束的衍射图案,此衍射图案要原大于微型反射镜,由此微型反射镜使得偏转信号光的光学损失较低。滤波/合成器80通过透镜组84接收了9束偏转后的信号光束,滤波/合成器80将每束偏转后的信号光与通过透镜组78接收到反射后的参考光束72进行汇合,每束汇合后的信号和参考光束入射到9只光电探测器阵列118中的一只光电探测器上。每束信号和参考光的汇合都会产生一个干涉图案,相应的光电探测器测量干涉图案中辐照度得到相应的条纹电子信号。如果参考光和信号光的光程发生变化,则会引起干涉图案位置偏移,从而产生随时间变化的条纹电子信号,由此可以检测试件10的位移变化。http://ng1.17img.cn/bbsfiles/images/2016/10/201610311050_615395_0_3.png图 2-3 测量结构件结构示意图 测量结构件如123的结构如图 2-3所示,主要包括准直器160、参考结构162和测试板164。准直器160和参考结构162
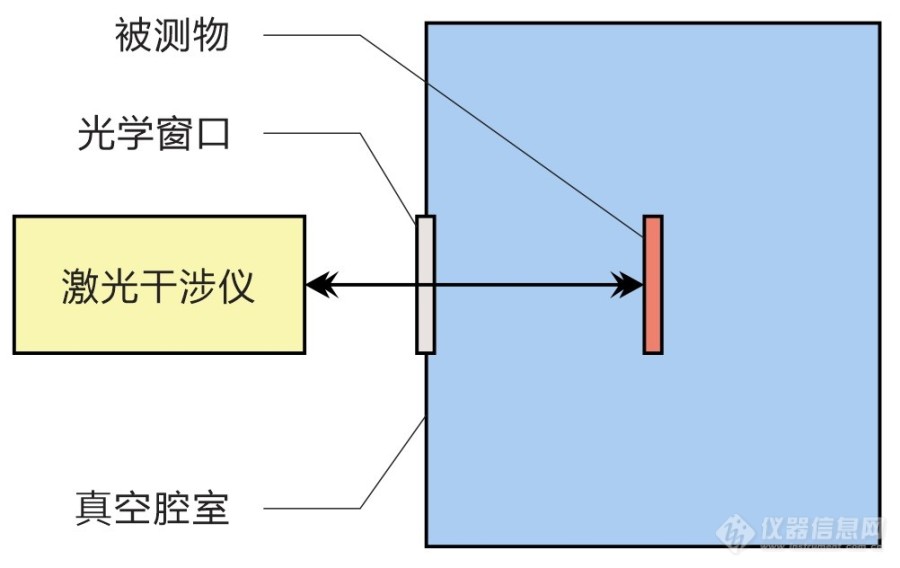
[color=#990000]摘要:在迈克尔逊激光干涉仪微位移和倾角的精密测量中,需要对真空度进行准确控制,否则会因变形、折射率和温度等因素的影响带来巨大波动,甚至会造成测量无法进行。本文介绍了真空度的自动化控制技术,详细介绍了具体实施方案。[/color][size=18px][color=#990000]一、问题的提示[/color][/size] 作为一种高精密光学仪器,迈克尔逊激光干涉仪得到了非常广阔应用,它可用于测量波长、气体或液体折射率、厚度、位移和倾角,具备对长度、速度、角度、平面度、直线度和垂直度等的高精密测量。但在高精密测量中,迈克尔逊干涉仪会受到气氛环境的严重影响,为此一般将被测物放置在低压真空环境中,如图1所示,并对真空度进行精密控制,否则会带来以下问题:[align=center][color=#990000][img=激光干涉仪真空度控制,500,315]https://ng1.17img.cn/bbsfiles/images/2022/01/202201270813137507_5730_3384_3.jpg!w690x435.jpg[/img][/color][/align][color=#990000][/color][align=center]图1 迈克尔逊激光干涉仪典型测试系统结构[/align] (1)测试环境的气体折射率波动,会对高精密测量带来严重影响。如果采用专门的气体折射率修正装置,测量精度也只能达到微米或亚微米量级,而无法实现更高精度的测量。 (2)如果真空腔室内有温度变化,腔室内的气压也会剧烈变化,相应折射率也会发生剧烈波动而严重影响干涉仪测量。 (3)在抽真空过程中,内外压差会造成真空腔室的微小变形,同时也会造成光学窗口产生位移和倾斜,从而改变测量光路的光程。 (4)在有些变温要求的测试领域,要求被测物能尽快的被加热和温度均匀,这就要求将真空度控制在一定水平,如100Pa左右,由此来保留对流和热导热传递能力。 总之,在迈克尔逊激光干涉仪微位移和倾角的精密测量中,需要对真空度进行准确控制。本文将介绍真空度的自动化控制技术以及具体实施方案。[size=18px][color=#990000]二、实施方案[/color][/size] 迈克尔逊激光干涉仪测试过程中,真空度一般恒定控制在100kPa左右,并不随温度发生改变。为此,拟采用如图2所示的真空度控制系统进行实施,具体内容如下:[align=center][color=#990000][img=激光干涉仪真空度控制,690,411]https://ng1.17img.cn/bbsfiles/images/2022/01/202201270813484950_7314_3384_3.jpg!w690x411.jpg[/img][/color][/align][align=center][color=#990000]图2 迈克尔逊激光干涉仪测试真空度控制系统结构[/color][/align] (1)采用1torr量程的电容真空计进行真空度测量,其精度可达±0.2%。 (2)采用24位A/D采集的高精度PID真空压力控制器,以匹配高精度真空压力传感器的测量精度,并保证控制精度。 (3)在真空腔室的进气口安装步进电机比例阀以精密调节进气流量。 (4)控制过程中,真空泵开启后全速抽取并保持抽速不变。然后对控制器进行PID参数自整定,使控制器自动调节比例阀的微小开度变化实现腔室真空度的精确控制。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
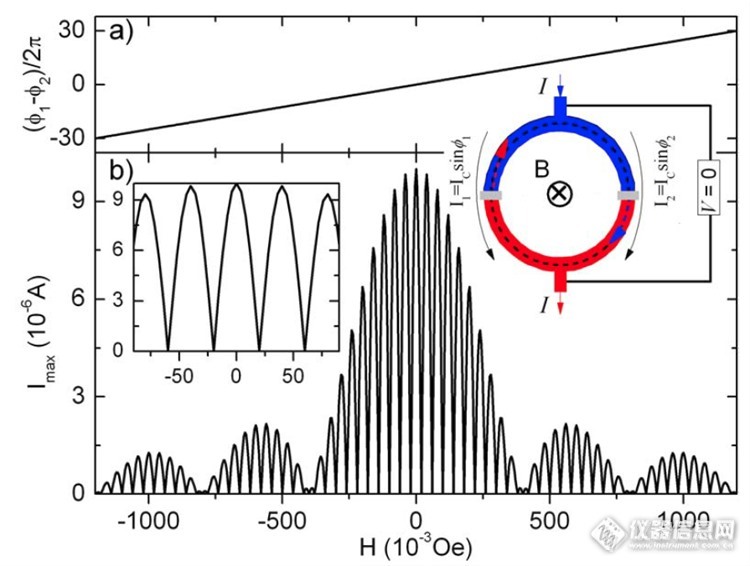
[align=center][color=#3366FF][b]超导量子干涉仪SQUID磁性测量的基本功练习[/b][/color][/align][align=center][color=#00b050]原创:王利晨 博士,美国Quantum Design公司[/color][/align][align=center][color=#00b050]推荐:陆俊 工程师,中科院物理所磁学室[/color][/align][align=center][color=#00b050]2017年7月27日[/color][/align][align=left][color=#00b0f0]一、引言[/color][/align][align=left]当今直流磁矩测量最精确的技术是SQUID(superconductor quantum interference devices, 超导量子干涉仪),尤其是DC-SQUID(直流超导量子干涉仪)最低可探测 1e-10 Oe数量级的磁场,即地磁场的百亿分之一,与胎儿的大脑产生的磁场相当。DC-SQUID的工作原理由两个完全一样的超导体-绝缘体-超导体组成的约瑟夫逊结(SIS Josephson junction,简称约结,如Nb-Al2O3-Nb,)并联而成,在没有外场的情形下,超导电流在两个约结中无差别的隧穿(tunneling of Cooper pairs),似乎绝缘体的阻挡并不存在。而当垂直SQUID环面方向存在外加磁通量时,假设SQUID自身电感不计,这两个约结因为在感应电流环路中分处磁通两侧而对外加磁通的响应电流刚好相反,于是引起超导电流在两个约结中的相位产生差异,该相位差随外加磁通量的变化线性变化。SQUID的总超导电流根据基尔霍夫定律(Kirchhoff's law)等于两个约结超导电流之和: I = I1+I2,在特定外磁通大小比如等于磁通量子(flux quantum, Φ0=h/2e=2.07×10-15 Wb)半奇数倍的情况下I1 和I2相位相差π/2,总超导电流I将恒为零,除非SQUID脱离超导态而变成普通导体,也就是说此时不存在贯穿SQUID的超导电流;而在外磁通为量子磁通的整数倍时I1 和I2相位一致,此时可贯穿SQUID的最大超导电流和单个约结能够传导的超导电流一致;这样,在外磁通变化时可贯穿SQUID的最大超导电流(SQUID两端电压保持为 0)与外磁通的依赖关系相当于形成干涉(Fraunhofer diffraction),这种相干干涉的结果是SQUID的有效最大超导电流随外场微小变化而剧烈震荡,如图01所示,因而可以实现超灵敏磁探测。前面简单介绍了DC-SQUID的工作原理,实际上还有一类射频超导量子干涉仪RF-SQUID,它与DC-SQUID的不同在于它只有一个约结,在单约结环路中不可能象DC-SQUID那样可通过贯穿电流来应用,而只能通过电磁感应引入交变电流加以应用。RF-SQUID在使用过程中同样通过磁通变换器和磁通锁相技术提高测量灵敏度,但由于其自身不存在象DC-SQUID的本征差分结构,其灵敏度相比没有DC-SQUID高(相差约一个数量级),不过由于RF-SQUID制作简单且成本较低,它在商用设备中常被应用。对于纳米磁性材料与反铁磁材料等磁矩较弱的样品,SQUID通常是不可替代的磁性测量仪器。目前国际上商用SQUID磁性测量仪器主要由美国的Quantum Design公司与英国的Cryogenic公司,在国内市场份额100%由前者占领,中国有几家单位做SQUID器件,但可惜尚未见整套SQUID磁性测量仪器产品推向市场。[/align][align=left]因为SQUID属于高冷的小众化产品,其制样、测量过程鲜见有人公开,本文考虑到制样过程涉及到磁性测量注意事项不仅仅用于SQUID,而且适合其他类似磁测量仪器比如振动样品磁强计VSM,进行详细的讨论和分享。[/align][align=center][img=,690,520]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_01_1611921_3.png[/img][/align][align=center]图01 SQUID器件高灵敏磁测量原理图[/align][align=left][color=#00b0f0]二、开关机[/color][/align][align=left]开关机是任何设备操作的必要过程,需要注意次序合乎规范,分别简介如下。[/align][align=left]1. 开机:开总电源开关(主机背面左侧)→开系统控制开关(主机正面右侧)→开计算机控制开关(主机正面左侧)→ 登陆计算机(初始密码为空)双击桌面上的MultiVu 图标进入测量操作系统系统→初始化过程大约1~2分钟→关闭自检结果提示消息框,准备测量。[/align][align=left][/align][align=left]2. 电网停电前,进行关机操作:关闭MultiVu测试系统关闭过程,1~2分钟自动完成关计算机→关系统控制电源(主机正面右侧)→ 关总电源(主机背面左侧)。[/align][align=left][/align][align=left]3.怀疑是信号端口等软件问题时,执行重启操作:退出MultiVu操作系统→关计算机→关系统控制电源→开系统控制电源→开计算机→进入MultiVu操作系统,此过程不需要关闭总电源。[/align][align=left][color=#00b0f0]三、样品制备[/color][/align][align=left]制备过程分为以下几步。[/align][align=left]1、取样称量,需要mg级精度,铁磁性样品最好少于1mg(否则较高磁场下SQUID探测器容易饱和失真),形状接近球形或正方形。[/align][align=left]2、做实验前准备好各种工具,如图02所示,需要注意:自己洗手,防止油性物质;擦洗剪刀等工具上的脏东西;尽量使用塑料镊子。[/align][align=center][img=,304,538]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_02_1611921_3.jpeg[/img][/align][align=center]图02 制样工具图片[/align][align=left]3、样品固定架尺寸很重要,为避免样品在测量过程中移动或晃动,需要有较稳固的固定措施,最方便的是借助胶管自身做固定支架,如图03所示,胶管内径6毫米,所以中间插的横向胶管尺寸7毫米最合适,太小容易卡不紧,太大做交流磁化率测量的时候放不进腔体。[/align][align=center][img=,287,509]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_03_1611921_3.png[/img][/align][align=center]图03 样品固定支架示意[/align][align=left]4、张飞也得会穿针,使用胶带将样品与固定支架绑劳,将胶带一头折叠,这样避免了胶带到处粘东西的问题,在穿过空管的时候也不会粘到空管,如图04所示。[/align][align=center][img=,526,290]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_04_1611921_3.png[/img][/align][align=center]图04 胶带穿过固定支架[/align][align=left]5、固定样品,排除胶带与样品之间的空气,如图05所示。[/align][align=center][img=,290,437]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_05_1611921_3.png[/img][/align][align=center]图05 将样品封进胶带[/align][align=left]6、使用另一片胶带固定样品,保证样品在测试过程中不会乱动,平行垂直皆可实现,如图06所示。[/align][align=center][img=,267,449]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_06_1611921_3.png[/img][/align][align=center]图06 将样品通过固定支架安装进测量柱[/align][align=center][img=,669,528]http://ng1.17img.cn/bbsfiles/images/2017/07/201707281810_01_1611921_3.png[/img][/align][align=center]图07 薄膜样品垂直膜面样品安装示意图[/align][align=left]7、样品也要透透气,样品卡入胶管中,为了快速实现热平衡,在胶管上下各开几个小洞,如图07所示。此处需要非常注意,小洞尽量开在胶管两段,这样在震动或者提拉测试的过程中小洞不会出现在鞍区。测试过程中要保证测试区域内背景一致,这样才可以减小误差。[/align][align=center][img=,296,444]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_07_1611921_3.png[/img][/align][align=center]图08 在样品柱上扎热、气交换孔[/align][align=left]8、腰杆要摆直。要保证胶管和所连接的测试杆两截成一条直线,否则在测试过程中非常容易碰壁。如图08所示。[/align][align=center][img=,265,470]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_08_1611921_3.png[/img][/align][align=center]图09 确认样品柱与测量杆准直[/align][align=left][/align][align=left][color=#c24f4a]注意:使用[/color][color=#c24f4a]SQUID[/color][color=#c24f4a]磁性测量杆时,无论安装样品托还是卸载样品托,均应将样品杆放置好,一只手固定住蓝色的接头部分,另一只手拧石英或铜样品托的塑料接头部分。不合理用力容易导致其折损,此杆属于特制无磁纤维材料制成,质脆,一旦造成损坏,修复起来有难度,买根新的需要人民币约[/color][color=#c24f4a]7000[/color][color=#c24f4a]元。[/color][/align][align=left][color=#00b0f0]四、样品安装[/color][/align][align=left]保证测量数据的正确性,样品的安装调试尤为重要。即待测样品正确安装固定在样品托(sample holder)上后,主要要做到以下几点:[/align][align=left]1、样品在杆上:要同心[/align][align=left]样品托(sample holder)固定到样品杆(sample rod)上后,要保证两者在一条直线上。[/align][align=left]2、样品在腔内:别偏心[/align][align=left]样品放入样品室后,进行水平方向360度旋转测量,找一最小值,对应的位置就是样品在水平方向最靠近样品室中心的位置。[/align][align=left]3、样品测量前:调中心[/align][align=left]样品杆在300K~5K时,杆的长度变化大约有1.4mm,故请在起始测量的温度点上再调一把中心。[/align][align=left]4、注意测量杆的关节:别松动[/align][align=left]所谓关节就是可以拆卸连接的地方。测量杆上一共有4处:①样品杆顶端与柔性接头的连接、②柔性接头与磁性碰锁的连接、③样品杆底端与蓝色接头的连接、④蓝色接头与样品托的连接。[/align][align=left]测量杆放入样品室前一定要检查这4处连接的地方是否固定牢靠,不能松动。[/align][align=left]5、注意样品的磁矩:别太大[/align][align=left]样品的磁矩最好在10emu以下,太大容易产生跳点。[/align][align=left]6、总结:为了便于记忆,以上几点归纳为四个字“三心二意”。五个关键词,十个字:“同心、偏心、中心、松动、大小”。[/align][align=left][color=#00b0f0]五、开始测量[/color][/align][align=left]测量控制过程的序列文件编写注意事项[/align][align=left]1、测M-H曲线,低温高场下磁矩跳动特别厉害的情况,可以在测试过程中进行改善。具体如下[/align][align=left] i) VSM振幅不宜调的过大,因为振幅过大虽然有利于测试小信号,会机械的引入误差。对于样品信号较小的情况,一般也建议调到4就可以。[/align][align=left]ii) 建议修改大家之前用的普遍的程序,MH测量扫场的过程中,每一个磁场点停顿(3-5)秒钟,具体根据自己的样品测试决定。[/align][align=left]iii) 加长平均测量时间,系统默认是2s,可以改为4s,这个时间也是根据自己的样品来决定。这样的话测量时间就会变长,所以应根据自己的样品和需要选择等待和采点的时间,尽量用较短的时间测量出可靠的数据。[/align][align=left][/align][align=left]附上一张工程师的调试图,左图为大家普遍用的程序做出来的。左图上方是MH曲线,下方是测量中的Standard error。右图是在每个磁场点等待5s,平均时间为4s,振幅为4时的数据,可以看到有明显的改善。[/align][align=left] [/align][align=center][img=,649,487]http://ng1.17img.cn/bbsfiles/images/2017/07/201707271931_09_1611921_3.jpeg[/img][/align][align=center]图10 测量平均时间效果对比图[/align][align=left]2、高级设置:调整完中心以后记得在advanced选项里设置auto tracking选项。设备调中心的时候是在300K,但实际测试的时候会根据自己的样品特性来选择合适的温度。材料都有热胀冷缩,测试杆也不例外,但Quantum Design公司的测试杆出厂之前都对杆子的热胀冷缩系数进行了标定,在测试过程中会根据温度的不同来自动修正中心位置,如图11所示。[/align][align=center][img=,334,445]http://ng1.17img.cn/bbsfiles/images/2017/07/201707281813_01_1611921_3.png[/img][/align][align=center]图11 调中心设置[/align][align=left]3、选择合适的量程:杀鸡焉用牛刀。根据自己样品的特性来选择振幅的大小,如果超过量程太多会造成误差,量程设置界面如图12。[/align][align=center][img=,554,738]http://ng1.17img.cn/bbsfiles/images/2017/07/201707281813_02_1611921_3.png[/img][/align][align=center]图12 测量振幅设置[/align][align=left]4、统一度量衡:秦始皇统一了度量衡,而Quantum Design的程序中为了满足大家对不同单位的使用,提供了emu和Am2的单位选择,设置入口如图13所示。[/align][align=center][img=,554,738]http://ng1.17img.cn/bbsfiles/images/2017/07/201707281813_03_1611921_3.png[/img][/align][align=center]图13 单位制切换[/align][align=left]5、量体裁衣:测试过程中需要根据自己样品磁性的强弱和特殊温区或者磁场区间来进行程序的编写。如果磁性较弱,建议采取Stable模式,反之可采用sweep模式,如图14所示。[/align][align=center][img=,690,531]http://ng1.17img.cn/bbsfiles/images/2017/07/201707281814_01_1611921_3.png[/img][/align][align=center]图14 温度磁场设定[/align][align=left]6、漂亮收尾: 因为SQUID用的是超导磁体,会存在剩磁,而减少剩磁的方法就是在程序结束后将磁场振荡到0场。注意:需要从2T以上磁场开始振荡降磁场,不然几乎没有效果。测试过程中大家可以根据测试的需要使用Linear或者No Overshoot模式,如图15所示。[/align][align=center][img=,554,738]http://ng1.17img.cn/bbsfiles/images/2017/07/201707281814_02_1611921_3.png[/img][/align][align=center]图15 程序结束关场设置[/align][color=#ff00ff]注意:每次测量要养成客观登记的习惯,有任何问题或异常都要有书面登记并向维护人员报告。[/color][align=left][color=#00b0f0]六、致谢[/color][/align][align=left]感谢磁学实验室胡明高级工程师在实验过程中提供的帮助和讨论。[/align][align=left][color=#00b0f0]七、参考文献[/color][/align][align=left]【1】 Tinkham M. Introduction to superconductivity (2nd edition) . 2ed. New York: McGraw-Hill Inc, 1996.[/align][align=left]【2】Fossheim K, Sudbo A. Superconductivity: physics and applications . Hoboken, New Jersey: John Wiley, 2004.[/align][align=left]【3】Quantum Design. San Diego: MPMS XL User's Manual, 2000.[/align]
如题,现在工作,想了解一下关于[i]M[i]ach-Zehnder干涉仪的相关资料但是网上查了很久,没有查到相关详细的信息如果谁了解 [/i]M[i]ach-Zehnder干涉仪的 工作原理,结构,或应用的文章,麻烦上传一些多谢![/i][/i]
激光干涉仪不仅可以测量等离子体密度,而且还可以进行数据分析和处理。定期开班的论坛,更是为结果分析提供了强有力的支持。
有谁晓得TTIR仪器的干涉仪的工作原理啊?

显微干涉仪,可测量镀膜厚度和表面粗糙度,测量范围0.1-0.8微米。http://ng1.17img.cn/bbsfiles/images/2012/07/201207171613_378255_2353034_3.jpg
角镜型迈克干涉仪和传统的迈克干涉仪有什么区别
哪位大神可以科谱一下SEM尺寸测量原理?金相显微镜是固定放大倍率下通过采集像素多少定标。但SEM并没有这样的操作,软件是如何实际任意放大倍率下量测的??
不同FTIR制造商在宣传各自产品时提到,采用:动态准直磁浮式迈克尔逊干涉仪、机械摇摆式迈克尔逊干涉仪、机械式迈克尔逊干涉仪,三种形式干涉仪主要特点及优势何在?先谢谢了!
一、 火花塞测量背景 随着汽车行业的迅猛发展,汽车的零配件厂家也发展迅速,现代汽车行业要求制造和加工的要求也越来越严格。火花塞作为发动机点火设备的重要零件,其电极间隙、工位尺寸、外观质量等质量都影响着汽车的性能。 火花塞的作用是使高压电流跳过电极之间的空隙而产生火花,点燃汽缸中的所燃混合气。这个电极之间的空隙就是火花塞的间隙。火花塞间隙大小会影响发动机的功率。若电极间隙值太小,则跳火时间较早且电火花太小,使混合气的燃烧不够完善。若电极间隙值太大,则跳火时间较晚且电火花持续时间太短,甚至无电火花产生,导致发动机高速运转时缺火或火花弱,不利于发动机高速、加速性能的发挥。火花塞电极间隙值偏小的是因为调整不当。而偏大的原因可能是调整不当,也有可能是使用时间过长。因为长时间使用,燃烧使得火花塞的中心电极缩短,从而加大了电极间隙值。[align=center][img]http://www.chotest.com/Upload/2019/9/201909056431132.png[/img][/align]二、测量要求 火花塞电极间距:分电器触点点火式的汽油发动机来说,火花塞电极间隙值正常情况下应为0.6mm~0.8mm,而对汽油喷射式或电子点火式发动机来说,火花塞电极间隙值正常情况下应为0.9mm~1.1mm。三、 传统的测量解决方法 传统的火花塞检测主要由人工实现,配以简单的检测设备,检测速度和检测精度已经远远不能满足要求。人工检测的缺点和局限性:(1)人工检测劳动强度大,生产效率低;(2)主观性会直接影响产品的质量,没有严格统一的质量标准,尤其在一些无法量化的定性检测上每个人的质量标准都不可能严格一致,从而直接影响检测结果:(3)在一些高速的生产环节,人工检测无法实现实时全检,抽检的结果会导致大量不合格产品的产生;(4)在高精度的检测要求下,人工检测的慢速度无法对所有产品进行准确检测;在某些高温或有毒场合,也难以通过人工方式进行检测;(5)人工检测的数据无法准确及时地纳入质量管理系统;(6)检测过程中,有些如尺寸的精确快速测量、条码识别、形状匹配、颜色辨识等,利用人眼根本无法连续稳定地进行 因此,对于这种带有高精度性和智能性的工作,人工检测在给工厂增加巨大的人工成本和管理成本的同时,准确性和规范化难以保证,无法得到满意的检测效果。四、中图仪器测量解决方案 [b]中图仪器图像尺寸测量仪[/b]采用双远心高分辨率光学镜头,结合高精度图像分析算法,并融入一键闪测原理。CNC模式下,只需按下启动键,仪器即可根据工件的形状自动定位测量对象、匹配模板、测量评价、报表生成,真正实现一键式快速精准测量。中图仪器基于机器视觉的自动测量技术,无需操作人员的参与,减少了人工成本,具有非接触、速度快、成本低、稳定性好、抗干扰能力强等突出优点,生产效率提高,缩短了生产周期,减少了设备折旧成本,有效地解决了传统测量方法存在的一系列问题。[align=center][img]http://www.chotest.com/Upload/2019/8/201908293306602.jpg[/img][/align]
哪个厂家卖干涉仪
近日,西安光机所新型干涉光谱成像技术研究取得重大进展,以光谱室胡炳樑研究员为首的研究团队在国内率先将离轴三反光学系统应用于短波红外干涉光谱成像系统中,并成功研制了基于M-Z像面干涉光谱成像的离轴三反桌面样机系统。 面向宽覆盖、高分辨率、高光谱分辨率的要求,离轴三反加M-Z像面干涉光谱成像技术可以有效解决大视场光学系统和大尺寸干涉仪的技术瓶颈。M-Z干涉仪放置在系统会聚光路中,在减小系统体积和重量的同时,能量利用率可以达到成像仪的极限;离轴三反光学系统则能够同时实现长焦距与大视场,并且没有中心遮拦,传递函数高。但在基于M-Z像面干涉的光谱成像系统中,离轴全反射系统难以补偿会聚光路中M-Z干涉仪棱镜元件所引入的像差,为此,科研人员将校正补偿系统应用到离轴三反系统中,设计并成功研制了一种新型离轴三反成像光学系统,并针对离轴三反系统装调自由度多,结构非对称性以及离轴系统离轴量需要精确测量调整等问题,解决了离轴非球面微应力装夹、多自由度调整结构形式、离轴三反系统高精度装调等多项技术难点,为高分辨率、高光谱分辨率光谱成像技术奠定了坚实基础,并完成了必要的技术储备,使我所先进光谱成像技术达到了国内领先水平。
最近一直在使用 研究所里的白光干涉仪(Talysurf CCI 2000)做表面检测,发现了不少问题,比如说: 1. 如何调整能快速获得干涉条纹; 2. 如何能减少数据丢失点; 3. 如何校准我一直在钻研随机带的说明书,不过Taylor Hobson这些英国人太懒了,很多东西都是笼统的讲,根本不细说! 所以,希望 有白光干涉仪操作经验的朋友,能在本楼讨论下,您也可给我发email:chenjc18@126.com。
[color=#000000]阿美特克(纽约证券交易所代码:AME)旗下Zygo公司宣布发布其最新的激光干涉仪Qualifire?。Qualifier加入了一系列高端干涉仪解决方案,该仪器旨在支持半导体、光刻、星载成像系统、尖端消费电子产品、国防等行业中最苛刻的计量应用。Qualifire将于1月30日在加州旧金山的SPIE Photonics West首次亮相。这款干涉仪在不牺牲性能的情况下,将显著的增强功能集成到一个更轻的小型封装中。[/color][color=#000000]Zygo 激光干涉仪产品经理 Erin McDonnell 表示:“我们很高兴将 Qualifire 推向市场,其改进的人体工程学设计使其易于使用,并且比 Zygo 的许多其他激光干涉仪更便携。使用激光干涉仪进行的测量往往对噪声、污染物和其他伪影敏感,因为该仪器能够提供纳米级精度;Qualifire上的可选模块飞点可主动减少甚至消除这些伪影,从而提高测量的可靠性和可重复性。飞点结合了Zygo最好的两种伪影减少技术:环纹和相干伪影减少。飞点在需要高精度的应用中尤其有价值,包括科学研究和先进的制造工艺。[/color][color=#000000]Qualifire为Zygo的激光干涉仪产品线带来这些功能和改进:[/color][color=#000000]Qualire激光干涉仪提供了许多新颖的新功能。[/color][b][color=#000000]智能附件接口[/color][/b][color=#000000]——干涉仪可以识别任何安装的“智能附件”,并自动应用系统错误文件并执行横向校准。[/color][b][color=#000000]体积小、重量轻[/color][/b][color=#000000]——最小的 Qualifire 型号重约 45 磅(20.4 千克)。 它是真正的便携式,特别是对于干涉仪必须经常移动或调整的复杂和精密应用。[/color][b][color=#000000]移相器[/color][color=#000000](PMR)[/color][/b][color=#000000]——PMR 是调制测试部件和参考光学器件之间干涉条纹所必需的,最终可创建定量表面图。其整体设计提供:[/color][color=#000000]整体机械稳定性和对准[/color][color=#000000]降低损坏或错位的风险[/color][color=#000000]确保性能一致,减少重新校准的需要[/color][b][color=#000000]改进的用户体验[/color][/b][color=#000000]——方便使用的电源按钮和运动安装支脚使设置更易于使用。大型控制旋钮可实现更精确的调整,这对校准和校准都至关重要。 集成手柄确保安全可靠的操作。[/color][b][color=#000000]更易于维护[/color][/b][color=#000000]—— 密封的光学系统和整合的电子元件使更换各种组件变得简单,而不会使光学元件暴露在污染物中。[/color][b][color=#000000]飞点[/color][/b][color=#000000]——用于减少伪影的可选模块,包括自动对焦功能。[/color][b][color=#000000]稳定变焦[/color][/b][color=#000000]——提供新变焦方法的选项,可在所有放大倍率下实现完美的图像配准和衍射限制图像采样。[/color][color=#000000]计量集团副总裁Kurt Redlitz 表示:“Qualifire 保持了 Zygo 在计量方面的高标准,同时提供了最高水平的精度并优化了用户体验。通过改进的人体工程学设计,它可以在不牺牲性能的情况下提高操作效率和部署灵活性。Qualifire 是一款更强大、更可靠、用户友好的仪器,可随时应付最苛刻的应用和环境——精度不容置疑。[/color][来源:仪器信息网译] 未经授权不得转载

各位,看我们附图中量测耳机线外露尺寸方法:用卡尺量,所量测的部位比较短,接触面积小,测试部位又软。人和人之间测试差异很大。 他们是用手来固定量测部位,或者用卡尺本身测深度部分来固定测量部位,但是测量出结果后又要翻转卡尺看示值,可能会导致翻转时卡尺变化而导致示值变动!另外,目视判断量测尺寸的起点也很容易产生较大的偏差,产品公差为0.3/+0mm。这个尺寸在生产线是100%检查的。 这个尺寸,现在客户投诉尺寸不合格。客户是用投影仪量的。 现在领导要我主导去改进。因为我们按上述卡尺量测出来的方法重复性和再现性很差。测量结果得不到保证。 真头痛啊,这个尺寸在生产线上该怎么管控啊?有没有合适的长度类仪器可定购?边缘的起点就有刻度,同一边有数显值的量具啊。[img]http://ng1.17img.cn/bbsfiles/images/2007/02/200702130949_42241_1858722_3.jpg[/img][img]http://ng1.17img.cn/bbsfiles/images/2007/02/200702130951_42242_1858722_3.jpg[/img][img]http://ng1.17img.cn/bbsfiles/images/2007/02/200702131000_42243_1858722_3.jpg[/img]
请教专家 1.FT_IR光谱仪器中,如果取消白光信号,如何确定干涉图的零光程位置?2.在迈克耳干涉仪中,动镜的电磁驱动基本原理是什么?谢谢!
长度测量工具 dimensional measuring instrument 将被测长度与已知长度比较,从而得出测量结果的工具,简称测量工具。长度测量工具包括量规、量具和量仪。习惯上常把不能指示量值的测量工具称为量规;把能指示量值,拿在手中使用的测量工具称为量具;把能指示量值的座式和上置式等测量工具称为量仪。 简史 最早在机械制造中使用的是一些机械式测量工具,例如角尺、卡钳等。16世纪,在火炮制造中已开始使用光滑量规。1772年和1805年,英国的J.瓦特和H.莫兹利等先后制造出利用螺纹副原理测长的瓦特千分尺和校准用测长机。19世纪中叶以后,先后出现了类似于现代机械式外径千分尺和游标卡尺的测量工具。19世纪末期,出现了成套量块。继机械测量工具出现的是一批光学测量工具。19世纪末,出现立式测长仪,20世纪初,出现测长机。到20年代,已经在机械制造中应用投影仪、工具显微镜、光学测微仪等进行测量。1928年出现气动量仪,它是一种适合在大批量生产中使用的测量工具。电学测量工具是30年代出现的。最初出现的是利用电感式长度传感器制成的界限量规和轮廓仪。50年代后期出现了以数字显示测量结果的坐标测量机(见三坐标测量机)。60年代中期,在机械制造中已应用带有电子计算机辅助测量的坐标测量机。至70年代初,又出现计算机数字控制的齿轮量仪,至此,测量工具进入应用电子计算机的阶段(见长度计量技术)。 分类 测量工具通常按用途分为通用测量工具、专类测量工具和专用测量工具3类。 测量工具还可按工作原理分为机械、光学、气动、电动和光电等类型。这种分类方法是由测量工具的发展历史形成的。但一些现代测量工具已经发展成为同时采用精密机械、光、电等原理并与电子计算机技术相结合的测量工具,因此,这种分类方法仅适用于工作原理单一的测量工具。 通用测量工具 可以测量多种类型工件的长度或角度的测量工具。这类测量工具的品种规格最多,使用也最广泛,有量块、角度量块、多面棱体、正弦规、卡尺、千分尺、百分表(见百分表和千分表)、多齿分度台、比较仪、激光干涉仪、工具显微镜、三坐标测量机等。
测量技术与仪器涉及所有物理量的测量,对于材料、工程科学、能源科学关系密切。目前的发展趋势有以下几点: (1)以自然基准溯源和传递,同时在不同量程实现国际比对。如果自己没有能力比对就要依靠其它国家。 (2)高精度。目前半导体工艺的典型线宽为0.25μm,并正向0.18μm过渡,2009年的预测线宽是0.07μm。如果定位要求占线宽的1/3,那么就要求10nm量级的精度,而且晶片尺寸还在增大,达到300mm。这就意味着测量定位系统的精度要优于3×10的-8次方,相应的激光稳频精度应该是10的-9次方数量级。 (3)高速度。目前加工机械的速度已经提高到1m/sec以上,上世纪80年代以前开发研制的仪器已不适应市场的需求。例如惠普公司的干涉仪市场大部分被英国Renishaw所占领,其原因是后者的速度达到了1m/sec。 (4)高灵敏,高分辨,小型化。如将光谱仪集成到一块电路板上。 (5)标准化。通讯接口过去常用GPIB,RS232,目前有可能成为替代物的高性能标准是USB、IEEE1394和VXI。现在,技术领先者设法控制技术标准,参与标准制订是仪器开发的基础研究工作之一。 我国仪器科技的发展现状 (1)由于长期习惯于仿制国外产品,我国的仪器仪表工业缺乏创新能力,跟不上科学研究和工程建设的需要。 (2)我国仪器科学与技术研究领域积累了大量科研成果,许多成果处于国际领先水平,有待筛选、提高和转化,但产业化程度很低,没有形成具有国际竞争力的完整产业。 未来发展趋势 1.发展方向与学科前沿 (1)配合数控设备的技术创新(如主轴速度,精度创成) 数控设备的主要误差来源可分为几何误差(共有21项)和热误差。对于重复出现的系统误差,可采用软件修正;对于随机误差较大的情况,要采用实时修正方法。对于热误差,一般要通过温度测量进行修正。我国红外测温仪机床行业市场萎缩同时又大量进口国外设备的原因之一就是因为这方面的技术没有得到推广应用。为此,需要高速多通道激光干涉仪:其测量速度达60m/min以上,采样速度达5000次/sec以上,以适应热误差和几何误差测量的需要。空气折射率实时测量应达到2×10的-7次方水平,其测量结果和长度测量结果可同步输入计算机。 (2)运行和制造过程的监控和在线检测技术 综合运用图像、频谱、光谱、光纤以及其它光与物质相互作用原理的传感器具有非接触、高灵敏度、高柔性、应用范围广的优点。在这个领域综合创新的天地十分广阔,如振动、粗糙度、污染物、含水量、加工尺寸及相互位置等。 (3)配合信息产业和生产科学的技术创新 为了在开放环境下求得生存空间,没有自主创新技术是没有出路的。因此应该根据有专利权、有技术含量、有市场等原则选择一些项目予以支持。根据当前发展现状,信息、生命医学、环保、农业等领域需要的产品应给予优先支持。如医学中介入治疗的精密仪器设备、电子工业中的超分辨光刻和清洁方法和机理研究等。 2.优先领域 在基础研究的初期,对于能否有突破性进展是很难预测的。但是,当已经取得突破性进展时,则需要有一个转化机制以进入市场。 (1)纳米溯源技术和系统。 (2)介入安装和制造的坐标跟踪测量系统。 关键理论和技术:超半球反射器(n=2或在机构上创新),快速、多路干涉仪(频差3~5兆),二维精密跟踪测角系统(0.2″~0.5″),通用信号处理系统(工作频率5兆),无导轨半导体激光测量系统(分辨率1μm),热变形仿真,力变形仿真。 这些内容不局限于一种技术方案,而是几种不同技术方案中概括出来的共同点。如红外测温仪采用无导轨干涉仪,对跟踪系统的要求可以降低;采用二维精密跟踪测角系统在1M3测量范围内可以得到高精度;有了超半球反射镜可以提高4路跟踪方案的精度。在现场进行介入制造和装配不能等待很长时间,力和热变形的补偿是必须的而且需要足够快,现在的技术还有相当大的差距,所以这些进展是关键性的。 应用范围:新型并行机构机床的鉴定,飞机装配型架的鉴定,大型设备安装,用于生物芯片精密机器人校准等。
由于客户这边需要,现需询问谁家有曲率半径测试仪和干涉仪的,请来咨询相关技术要求!谢谢!
最近实验需要用到正相高效液相色谱,但面临一个柱子型号的选择问题,因为刚开始接触液相,所以很多知识还不懂。我想向各位前辈请教一下,关于液相色谱的长度,内径大小以及填充物颗粒的尺寸是怎么影响物质的分离的呢,它们各自对分离有怎样的影响的?
关于有关顶杆热膨胀仪的几个问题作者美国安特公司的王恒博士1.如果想达到更高的准确度,应该用非接触干涉膨胀仪。干涉膨胀仪的优点是,光学非接触、绝对测量、测量准确度高。但造价昂贵、仪器结构及操作都很复杂、温度不容易超过1000℃,对样品形状及表面要求苛刻,不适用于材料的烧结过程的研究。一般,为建立一级热膨胀标准的权威机构采用非接触干涉膨胀仪为主要手段。请注意一下,干涉计本身的测长很准,但组装在膨胀仪上后,因为与样品有关的热系统的关系,对于样品的随温度变化的真正伸长量的测量准确度会随温度升高而下降。比如在日本计量所作的双路差频干涉计和在美国西海岸的Precision Mesurement and Instrument Corp作的迈可耳逊干涉计,其本身的位移变化量可测到1nm到3nm左右,但用在热膨胀测量应用上,因热系统的各部份的热变形等原因,“零点漂移”在几百度时就达到了30至50nm,属于随机误差,不能修正的。请见国际热物理杂志Internation1 J. Thermophys. Vo1 23, No.2,2002年3月的文章“Development of a Laser Interferometric Dilatometer for Measurment of Thermal Expansion of Solid in Temperature range 300 to 1300K”d在的549页关于干涉仪的零漂的3.2节中的图4中,在300 to 1300K的温度范围内的零漂达到了50nm。这是不能修正的,必须考虑在误差分析内。因此,对于干涉法热膨胀仪来讲,伸长量的测量准确度受系统的热稳定性影响而不能达到干涉计本身的测长准确度的。商品化的干涉膨胀仪的最高温度是700℃。2.作为最传统的热膨胀仪的测量手段的顶杆法热膨胀仪的优点是,使用容易、结构简单适用各种形状的样品等。缺点是,属于接触、相对测量方法,需要用标准样品对系统定标,测长准确度低,但可达到很高温度,适用于材料的烧结过程的研究。顶杆法热膨胀仪结构特点是,用比样品长几倍的顶杆与试样接触,把试样的长度变化传递给加热炉外的与其接触的位移传感器。这样,在顶杆上存在从高温(试样)到室温(位移传感器)的温度变化,整体的热稳定性或者说“热环境”与干涉膨胀仪的情况比,就“差”了更多,温度超高越严重,这是自然引起而不可避免的。这是不能用标准样品的定标来完全消除的。这将导致位移传感器读数的波动,在有些情况下,甚至导致测量结果的突变。在文章“Examination of Thermal Expansion Uniformity of Glassy Carbon as a Candidate Standard Reference Material For Thermal Expansion Measurements”中的第94页第一段,指出对于玻璃碳材料的测量,第一次的测量结果不可靠而必须取消,在高温段和低温段的数据也要取消。即使顶杆法热膨胀仪的位移传感器本身测量准确度能达到了0.1微米以下,对试样的热膨胀量引起的真正伸长量测量准确度也很难说达到0.1微米。日本计量所曾把一个双路差频干涉计组装到一台顶杆法热膨胀仪的位移测量的头部作过实验,表明了这一点。当时的课题是考核顶杆法热膨胀仪的特性。就好比是用微伏电压表接一般的热电偶测温,尽管电压表可以读到微伏,但在毫伏读数以下对测温已没有任何意义了。3.LVDV本身的测量位移量的准确度达不到nm量级(1)目前最好螺旋测微仪的准确度是±1微米。Nech用于标定LVDT的是螺旋测微仪,所有的被定标的仪器的测量准确度不可能超过用于定标的仪器的测量准确度,所以即使用最好的螺旋测微仪定标,其热膨胀仪的LVDT也不可能得到优于1微米的准确度。离开准确度,来谈灵敏度是没有实际意义的。在日本计量所考核Netzsch的DIL402时,为了修正LVDT的读数,正是基于这个道理,用双路差频干涉计而不用螺旋测微仪。(2)LVDT的线性度用双路差频干涉计对Netzsch 的DIL402的LVDT的考察的结果表明,当位移量为105.23微米时,LVDV的读数与干涉计的读数的偏差达到0.69微米。因此,线性度实际上为0.66%之大,已排出了热效应的影响。而在NETZSCH的所有产品中,并没有对线性度进行修正的。这也说明了所谓nm量级读数的不正确性,是没有意义的。(3)在TN105中提到的其它因素,如对电压、温度、处理电路等极其敏感,易引起漂移,等等,其nm量级的读数在噪声之中。需要经常进行定标等。4.采用数字位移传感器在顶杆热膨胀仪上,比LVDV有很多的优点,请见TN105数字位移传感器的0.5微米的测长分辨率(也可以说准确度),对于顶杆热膨胀仪来讲,具有实际的意义,完全满足顶杆热膨胀仪的各种应用场合。5.对于低膨胀(如10-7/K)量级的材料在有限的温度范围内(如几十度)内的热膨胀的高精度的测量,顶杆热膨胀仪不适用,应采用非接触绝对的干涉热膨胀仪,并用阶梯等温的加热方式。我们接到过超低膨胀(如10-7/K)的材料在有限的温度范围内的高精度的测量的课题,比如说,一组10-7/K的量级的玻璃,要求分辨出不同成份、工艺下对热膨胀的影响。曾用Netzsch的DIL402和双路差频干涉膨胀仪进行了研究,同时也对DIL402的测量误差进行分析。结果表明,干涉膨胀仪能在10℃的温度间隔内,分辨到1.5X10-8/K,这里的分辨指的是在可能 的最大测量误差范围(或者说是极限误差,3σ程度)外。如果最大测量误差大于1.5X10-8/K,就不能说分辨到1.5X10-8/K。而DIL402的结果(加热范围为300℃,已得到足够的膨胀量),对于所有的材料都没有给出意义的分辨,因所测的各种材料的热膨胀率都在其测量误差范围内,即在12X10-8/K(最大误差,3σ)的误差带内。作为这一课题的附带结果再次表明,Netzsch关于达到1.25nm/digit的测长sensitivity的声称是没有实际意义的。如果有意义的话,已达到了干涉热膨胀仪的测长精度,而为什么实际的测量误差却是干涉热膨胀仪的测量误差的10倍?!有任何问题,欢迎随时交流。







 我要推广仪器
我要推广仪器
 下载APP
下载APP