动态热机械分析仪原理简介
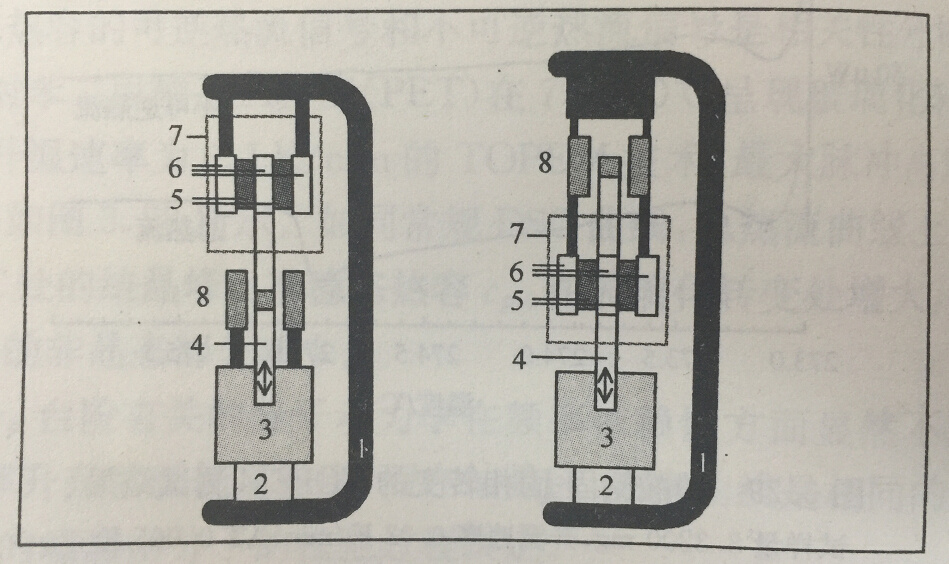
p 动态热机械分析(或称动态力学分析)是在程序控温和交变应力作用下,测量试样的动态模量和力学损耗与温度或频率关系的技术,使用这种技术测量的仪器就是动态热机械分析仪(Dynamic mechanical analyzer-DMA)。br//pp DMA仪器的结构及重要部件如图所示:/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/26b5a0aa-c61a-4937-9512-91ce4103c5fd.jpg" title="DMA结构.jpg" width="400" height="238" border="0" hspace="0" vspace="0" style="width: 400px height: 238px "//pp style="text-align: center "strongDMA的结构示意图(左:一般DMA的结构 右:改进型DMA的结构)/strong/pp style="text-align: center "1.基座 2.高度调节装置 3.驱动马达 4驱动轴 5.(剪切)试样 6.(剪切)试样夹具 7.炉体 8.位移传感器(线性差动变压器LVDT) 9.力传感器/pp DMA核心的部件有驱动马达、试样夹具、炉体、位移传感器、力传感器。/ppstrong驱动马达/strong—以设定的频率、力或位移驱动驱动轴/ppstrong试样夹具/strong—DMA依据所选用夹具的不同,可采用如图所示的不同测量模式:/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/18bffd85-0be9-4361-927f-8be409b209c8.jpg" title="DMA测量模式.jpg" width="400" height="152" border="0" hspace="0" vspace="0" style="width: 400px height: 152px "//pp style="text-align: center "strongDMA测量模式/strong/pp style="text-align: center "1.剪切 2.三点弯曲 3.双悬臂 4.单悬臂 5.拉伸或压缩/ppstrong炉体/strong—控制试样服从设定的温度程序/ppstrong位移传感器/strong—测量正弦变化的位移的振幅和相位/ppstrong力传感器/strong—测量正弦变化的力的振幅和相位。一般DMA没有力传感器,由传输至驱动马达的交流电来确定力和相位/ppstrong刚度、应力、应变、模量、几何因子的概念:/strong/pp 力与位移之比称为刚度。刚度与试样的几何形状有关。/pp 归一化到作用面面积A的力称为机械应力或应力σ(单位面积上的力),归一化到原始长度Lsub0/sub的位移称为相对形变或应变ε。应力与应变之比称为模量,模量具有物理上的重要性,与试样的几何形状无关。/pp 在拉伸、压缩和弯曲测试中测得的是杨氏模量或称弹性模量,在剪切测试中得到的是剪切模量。/pp 在动态力学分析中,用力的振幅FA和位移的振幅LA来计算复合模量。出于实用的考虑,用所谓的几何因子g将刚度和模量两个量的计算标准化。/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/feb82561-d2c4-43db-a8c4-44864e46f3b1.jpg" title="DMA-1.jpg"//pp可得到/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/c69705fc-1d40-430b-ab24-80b16e80df41.jpg" title="DMA-2.jpg"//ppFsubA/sub/LsubA/sub为刚度。所以测定弹性模量的最终方程为/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/08ff85ae-0c32-4333-a18d-1aef926a698d.jpg" title="DMA-3.jpg"//pp模量由刚度乘以几何因子得到。/pp 各种动态热机械测量模式及几何因子的计算公式见下表:/pp style="text-align: center "表1 DMA测量模式及其试样几何因子的计算公式/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/1a1ebfe9-d3d3-4205-b263-c6348668361f.jpg" title="DMA测量模式及其试样几何因子的计算公式.jpg" width="400" height="276" border="0" hspace="0" vspace="0" style="width: 400px height: 276px "//pp 注:表中b为厚度,w为宽度,l为长度。/ppstrongDMA测试的基本原理:/strong/pp 试样受周期性(正弦)变化的机械振动应力的作用,发生相应的振动应变。测得的应变往往滞后于所施加的应力,除非试样是完全弹性的。这种滞后称为相位差即相角δ差。DMA仪器测量试样应力的振幅、应变的振幅和应力与应变间的相位差。/pp 测试中施加在试样上的应力必须在胡克定律定义的线性范围内,即应力-应变曲线起始的线性范围。/pp DMA测试可在预先设定的力振幅下或可在预先设定的位移振幅下进行。前者称为力控制的实验,后者称为位移控制的实验。一般DMA只能进行一种控制方式的实验。改进型DMA能在实验过程中自动切换力控制和位移控制方式,保证试样的力和位移变化不超出程序设定的范围。/ppstrong复合模量、储能模量、损耗模量和损耗角的关系:/strong/pp DMA分析的结果为试样的复合模量Msup*/sup。复合模量由同相分量M' (或以G' 表示,称为储能模量)和异相(相位差π/2)分量M' ' (或以G' ' 表示,称为损耗模量)组成。损耗模量与储能模量之比M' ' /M' =tanδ,称为损耗因子(或阻尼因子)。/pp 高聚物受到交变力作用时会产生滞后现象,上一次受到外力后发生形变在外力去除后还来不及恢复,下一次应力又施加了,以致总有部分弹性储能没有释放出来。这样不断循环,那些未释放的弹性储能都被消耗在体系的自摩擦上,并转化成热量放出。/pp 复合模量Msup*/sup、储能模量M' 、损耗模量M' ' 和损耗角δ之间的关系可用下图三角形表示:/pp style="text-align: center "img src="http://img1.17img.cn/17img/images/201807/insimg/51080aa0-2961-4541-81f5-b04011690e46.jpg" title="复合模量三角形关系.jpg" width="400" height="191" border="0" hspace="0" vspace="0" style="width: 400px height: 191px "//pp 储能模量M' 与应力作用过程中储存于试样中的机械能量成正比。相反,损耗模量表示应力作用过程中试样所消散的能量(损耗为热)。损耗模量大表明粘性大,因而阻尼强。损耗因子tanδ等于黏性与弹性之比,所以值高表示能量消散程度高,黏性形变程度高。它是每个形变周期耗散为热的能量的量度。损耗因子与几何因子无关,因此即使试样几何状态不好也能精确测定。/pp 模量的倒数成为柔量,与模量相对应,有复合柔量、储能柔量和损耗柔量。对于材料力学性能的描述,复合模量与复合柔量是等效的。/pp 通常可区分3种不同类型的试样行为:/pp纯弹性—应力与应变同相,即相角δ为0。纯弹性试样振动时没有能量损失。/pp纯粘性—应力与应变异相,即相角δ为π/2。纯粘性试样的形变能量完全转变成热。/pp粘弹性—形变对应力响应有一定的滞后,即相角δ在0至π/2之间。相角越大,则振动阻尼越强。/pp DMA分析的各个物理量列于下表:/pp style="text-align: center "表2 DMA物理量汇总/ptable border="1" cellspacing="0" cellpadding="0" align="center"tbodytr class="firstRow"td width="284" style="border-right: none border-bottom: none border-left: none border-top: 1px solid windowtext padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"应力/span/p/tdtd width="284" style="border-right: none border-bottom: none border-left: none border-top: 1px solid windowtext padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "σ(t)=σsubA/subsinωt=FsubA/sub/Asinωt/span/p/td/trtrtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"应变/span/p/tdtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "ε(t)=εsubA/subsin(ωt+δ)=LsubA/sub/Lsub0/subsin(ωt+δ)/span/p/td/trtrtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"模量/span/p/tdtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "M*(ω)=σ(t)/ε(t)=M’sinωt+M’’cosωt/span/p/td/trtrtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"模量值/span/p/tdtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "|M*|=σsubA/sub/εsubA/sub/span/p/td/trtrtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"储能模量/span/p/tdtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "M’(ω)=σsubA/sub/εsubA/subcosδ/span/p/td/trtrtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"损耗模量/span/p/tdtd width="284" style="border-width: initial border-style: none border-color: initial padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "M’’(ω)=σsubA/sub/εsubA/subsinδ/span/p/td/trtrtd width="284" style="border-top: none border-right: none border-left: none border-bottom: 1px solid windowtext padding: 0px 7px "p style="text-align:center"span style="font-family:宋体"损耗因子/span/p/tdtd width="284" style="border-top: none border-right: none border-left: none border-bottom: 1px solid windowtext padding: 0px 7px "p style="text-align:center"span style="font-family:' Times New Roman' ,' serif' "tanδ=M’’(ω)/M’(ω)/span/p/td/tr/tbody/tablepstrong温度-频率等效原理/strong/pp 如果在恒定负载下,分子发生缓慢重排使应力降至最低,材料因此而随时间进程发生形变 如果施加振动应力,因为可用于重排的时间减少,所以应变随频率增大而下降。因此,材料在高频下比在低频下更坚硬,即模量随频率增大而增大 随着温度升高,分子能够更快重排,因此位移振幅增大,等同于模量下降 在一定频率下在室温测得的模量与在较高温度、较高频率下测得的模量相等。这就是说,频率和温度以互补的方式影响材料的性能,这就是温度-频率等效原理。因为频率低就是时间长(反之亦然),所以温度-频率等效又称为时间-温度叠加(time-temperature superposition-TTS)。/pp 运用温度-频率等效原理,可获得实验无法直接达到的频率的模量信息。例如,在室温,几千赫兹下橡胶共混物的阻尼行为是无法由实验直接测试得到的,因为DMA的最高频率不够。这时,就可借助温度-频率等效原理,用低温和可测频率范围进行的测试,可将室温下的损耗因子外推至几千赫兹。/ppstrong典型的DMA测量曲线:/strong/pp DMA测量曲线主要有两大类,动态温度程序测量曲线和等温频率扫描测量曲线。/pp 动态温度程序测量曲线,是在固定频率的交变应力条件下,以一定的升温速率(由于试样较大,通常速率较低,以1~3K/min为佳),进行测试。得到的是以温度为横坐标、模量为纵坐标的图线,图中可观察储能模量G' ,损耗模量G' ' ,和损耗因子tanδ随温度的变化曲线,反应了试样的次级松弛、玻璃化转变、冷结晶、熔融等过程。/pp 等温频率扫描测量曲线,是在等温条件下,进行不同振动频率应力作用时的扫描测试。得到的是以频率为横坐标、模量为纵坐标的图线,图中可观察储能模量G' ,损耗模量G' ' ,和损耗因子tanδ随频率的变化曲线。等温测试的力学松弛行为与频率的关系又称为力学松弛谱,依据温度-频率等效原理,可将不同温度条件下的力学松弛谱沿频率窗横向移动,来得到对应于不同温度时的模量值。/p

 400-860-8560
400-860-8560
 留言咨询
留言咨询














 我要推广仪器
我要推广仪器
 下载APP
下载APP


