张福根专栏|激光粒度仪导论之性能特点篇
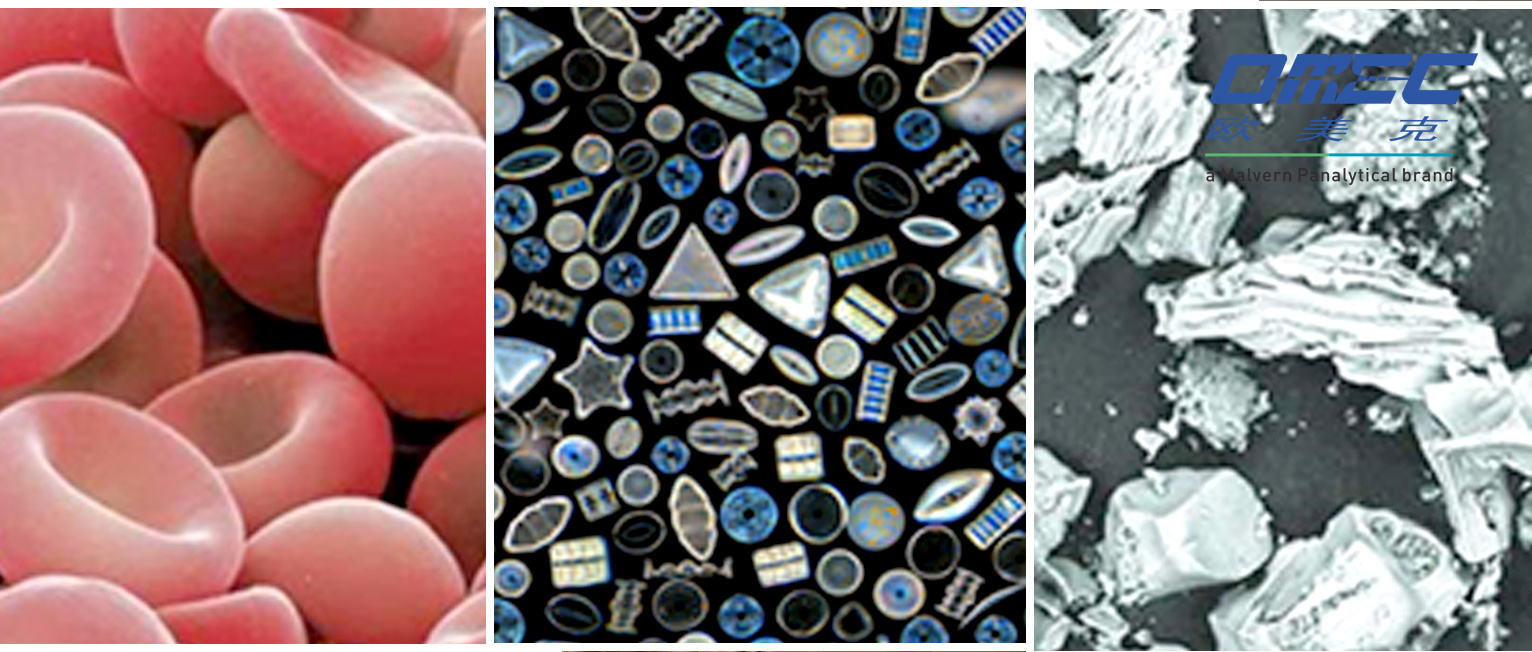
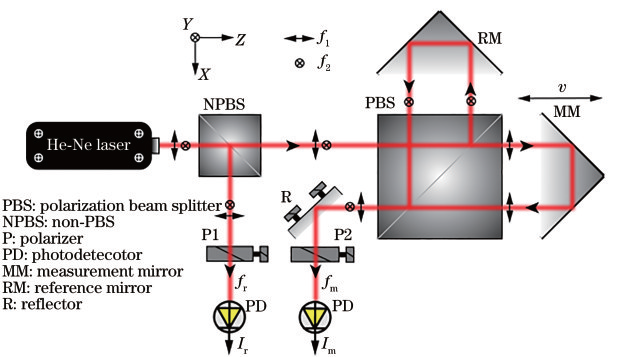
p strong span style=" font-family:宋体" & nbsp & nbsp 编者按: /span /strong span style=" font-family:宋体" 在 /span 8 span style=" font-family:宋体" 月初,张福根博士的激光粒度仪导论从原理、结构、报告解读、参数拾遗四个维度对激光粒度仪进行了条分缕析,仪器信息网特设专栏刊登了张福根博士的四篇论述文章。好文如佳酿,兴难尽而回味长,幸而大家手笔未歇,从今日起,激光粒度仪应用导论的后续珠玉,将继续晦养读者的头脑,本文飨食读者的,是激光粒度仪导论之性能特点篇 /span ~ /p p style=" text-align:center" strong span style=" font-family:宋体" 激光粒度仪导论之性能特点篇 /span /strong /p p span style=" font-family:宋体" & nbsp & nbsp & nbsp /span span style=" font-family:宋体" 这里所谓的“性能特点”,是激光粒度仪相对于其他原理的粒度测量仪器而言的。除激光粒度仪外,当前市面上主流的粒度仪还有:(1)颗粒图像仪,分为动态和静态两类;(2)电阻法(Electric sensing zone 或 Electric resistance)颗粒计数器;(3)沉降法粒度仪,按照沉降力的来源分为重力沉降和离心沉降两类;按照沉降速度的测量方法分为光透沉降、X-线沉降、沉降管和沉降天平等多种;(4)动态光散射(Dynamic light scattering)粒度仪。鉴于动态光散射仪器只测量纳米和亚微米颗粒,与激光粒度仪的测量范围重叠部分很少,不应放在一起比较。本文讨论的激光粒度仪性能特点是相较于以上前3类仪器而言的 /span span style=" font-family:宋体" 。 /span /p p style=" text-indent:28px" strong span style=" font-family:宋体" 动态范围大 /span /strong /p p style=" text-indent:29px" span style=" font-family:宋体" 所谓动态范围是指仪器在一个量程内能测量的最大粒径与最小粒径之比。现在大部分品牌的激光粒度仪都无需调整量程(通过更换傅里叶透镜或调节测量池位置实现),所以仪器的测量范围就是仪器的动态范围。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 激光粒度仪的动态范围是由仪器同时能测量的最大散射角和最小散射角决定的。从原理分析,如果只测量前向散射光,测量下限能达到0.3µ m左右;如果光的探测角度范围扩展到后向,那么测量下限可达到0.1µ m。测量上限则由仪器的等效焦距和探测器最小单元的扇形平均半径决定(参考文献:胡华, 张福根等. 激光粒度仪的测量上限. 光学学报, 2018, 38(4): 0429001)。大多数品牌都能轻松测到1000µ m。可见激光粒度仪的动态范围能达到3300:1(无后向散射)或10000:1。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 需要说明的是,大多激光粒度仪厂商都把自己产品的测量下限宣传得很小,例如0.01微米(即10纳米),而把上限说得很大。有些是缺乏科学基础的。用户采信时要谨慎。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 不管怎样,其他3类粒度仪的动态范围都在 /span span style=" font-family:宋体" 100 /span span style=" font-family:宋体" 左右或者更小。可见激光粒度仪的动态范围远大于其他原理的仪器,这给用户使用带来极大的方便。 /span /p p class=" MsoListParagraph" style=" margin-left:24px" strong span style=" font-family:宋体" 测量速度快 /span /strong /p p & nbsp & nbsp & nbsp span style=" font-family:宋体" 激光粒度仪的测量过程主要包括背景测量、投样和搅拌循环、散射光测量、数据反演计算以及报告显示等。整个过程大约需要1分钟左右。当然这里不包括前期的样品制备过程。对难分散样品,在投入仪器的分散槽之前,需用外置的高功率超声分散器进行预处理,这个过程从数秒到几分钟,视样品不同而异。不过难分散样品的预分散对任何仪器都是必须要做的。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 预处理后的测量时间,电阻法仪器也很快,整个过程也在1分钟左右。沉降法仪器每次测量都要等整个沉降过程完成,同时为了满足斯托克斯定律要求的层流条件,沉降速度还不能太快。这样就造成测量过程需要30分钟甚至更长。静态图像法需要一幅一幅地处理图像,还需要人工干预,测一个样需要30分钟或更长。动态图像仪需要数分钟。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 综上所述,激光粒度仪的测量速度是所有现存的粒度仪中最快的仪器之一。 /span /p p class=" MsoListParagraph" style=" margin-left:24px" strong span style=" font-family:宋体" 重复性和再现性好 /span /strong /p p style=" text-indent:29px" span style=" font-family:宋体" 重复性是指将制备好的颗粒样品输送到测量池后,让仪器进行多次测量,不同次测量结果之间的一致性。重复性又称“测量精度”。重复性通常用多次测量结果的相对均方差或标准差来表示。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 有必要提醒的是,同一台仪器,量程的中段往往测量精度高,两端的测量精度低。在不加说明的情况下,都是指量程中段的精度。另外对粒度测量,重复性还跟样品的特性有关。首先是粒度分布宽度的影响。宽度越宽,重复性越低。其次跟样品在介质中的分散难易有关,容易团聚的样品,重复性低。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 激光粒度仪比较典型的精度指标是:对单分散(即理论上认为所有颗粒有相同的粒径)样品,D50重复性误差小于 /span span style=" font-family:宋体" 0.5% /span span style=" font-family:宋体" ,甚至 /span span style=" font-family:宋体" 0.2% /span span style=" font-family:宋体" 。对一般的多分散样品(最大最小颗粒之比 /span span style=" font-family:宋体" 10 /span span style=" font-family:宋体" 到 /span span style=" font-family:宋体" 20 /span span style=" font-family:宋体" 倍),国际标准 /span span style=" font-family:宋体" ISO13320 /span span style=" font-family:宋体" ( /span span style=" font-family:宋体" 2009 /span span style=" font-family:宋体" 版)的要求是:” /span span style=" font-family:宋体" D50 /span span style=" font-family:宋体" 重复误差小于 /span span style=" font-family:宋体" 3% /span span style=" font-family:宋体" , /span span style=" font-family:宋体" D10 /span span style=" font-family:宋体" 和 /span span style=" font-family:宋体" D90 /span span style=" font-family:宋体" 重复误差小于 /span span style=" font-family:宋体" 5% /span span style=" font-family:宋体" 。如果粒径小于 /span span style=" font-family:宋体" 10 /span span style=" font-family:宋体" 微米,相对误差可以翻倍”。现行的商品化激光粒度仪, /span span style=" font-family:宋体" 重复性误差大多远小于国际标准的要求 /span span style=" font-family:宋体" 。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 再现性是指不同的人对同一样品进行测量(有时为了简便,也有同一个操作者,对同一样品多次取样再测量),得到的结果之间的一致性。显然,重复性是再现性的基础。由于受取样的代表性、样品制备方法(比如分散,移样的手法等)的差异的影响,再现性误差总是大于重复性误差。不过由于激光粒度仪有很高的重复精度,并且取样量比其他测量方法大,因此再现性也可以做到很高。 /span /p p style=" text-indent:29px" span style=" font-family: 宋体" 不论是重复性误差还是再现性误差,一般都是用相对或绝对均方差来表示的。我们了解到有的用户对粒度测量误差的物理意义不甚了解或不甚准确,在此特意再解释一下: /span /p p style=" text-indent:29px" span style=" font-family: 宋体" 我们首先要弄清楚,不论是平均粒径、边界粒径或者用户特别感兴趣的其他测量值,每一次的测量值跟上一次都不可能完全一样,因此每一个量的测量都存在误差。现在假设某一个量(例如D50)在n 次测量中,得到的数值分别为a sub 1 /sub ,a sub 2 /sub ,?,a sub n。 /sub /span /p p style=" text-indent:29px" span style=" font-size:14px font-family:& #39 Calibri& #39 ,& #39 sans-serif& #39 " img src=" https://img1.17img.cn/17img/images/201808/insimg/06638399-24f9-44c5-9f0f-6f0309d6149d.jpg" title=" 专栏5图1.png" / /span /p p style=" text-indent:29px" span style=" font-family: 宋体" 举个例子:设我们对一个颗粒样品进行了10次测量,每次的测量值见表2。其平均值和标准差分别为14.139微米和0.021微米。所以 /span span style=" font-family: Symbol" ` /span span style=" font-family: 宋体" a +S=14.139+0.021=14.160 /span span style=" font-family: 宋体" (微米),把测量值和这个上边界值对比,可以发现第4、第5共2个测量值超出; /span span style=" font-family: Symbol" ` /span span style=" font-family: 宋体" a -S=14.139-0.021=14.118 /span span style=" font-family: 宋体" (微米),把测量值和这个下边界对比,可以发现第6、第10共2个测量值超出;总共有4个测量值超出 /span span style=" font-family: Symbol" ` /span span style=" font-family: 宋体" a-S, /span span style=" font-family: Symbol" ` /span span style=" font-family: 宋体" a+S /span span style=" font-family: 宋体" 的区间,占测量值个数的40%,换言之,有60%的测量值在这个区间内。 /span /p p style=" text-align:center text-indent:29px" span style=" font-family: 宋体" 表2 测量误差的含义举例 /span /p table border=" 0" cellspacing=" 0" cellpadding=" 0" width=" 547" tbody tr style=" height:25px" class=" firstRow" td width=" 113" nowrap=" " rowspan=" 2" style=" border-style: solid border-color: windowtext windowtext black border-width: 1px padding: 0px 7px " height=" 25" p style=" text-align:center" span style=" font-family: 宋体" 序号 /span /p /td td width=" 95" rowspan=" 2" style=" border-style: solid solid solid none border-top-color: windowtext border-top-width: 1px border-bottom-color: black border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 25" p style=" text-align:center" span style=" font-family: 宋体" 单次测量值(微米) /span /p /td td width=" 94" rowspan=" 2" style=" border-style: solid solid solid none border-top-color: windowtext border-top-width: 1px border-bottom-color: black border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 25" p style=" text-align:center" span style=" font-family: 宋体" 测量值与上边界的差 /span /p /td td width=" 80" rowspan=" 2" style=" border-style: solid solid solid none border-top-color: windowtext border-top-width: 1px border-bottom-color: black border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 25" p style=" text-align:center" span style=" font-family: 宋体" 正值表示超出 /span /p /td td width=" 91" rowspan=" 2" style=" border-style: solid solid solid none border-top-color: windowtext border-top-width: 1px border-bottom-color: black border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 25" p style=" text-align:center" span style=" font-family: 宋体" 测量值与下边界的差 /span /p /td td width=" 50" rowspan=" 2" style=" border-style: solid solid solid none border-top-color: windowtext border-top-width: 1px border-bottom-color: black border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 25" p style=" text-align:center" span style=" font-family: 宋体" 负值表示超出 /span /p /td td style=" border: none " width=" 0" height=" 25" br/ /td /tr tr style=" height:30px" td style=" border: none " width=" 0" height=" 30" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 1 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.149 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.011 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.031 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 2 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.152 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.008 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.034 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 3 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.138 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.022 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.02 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 4 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px background-color: yellow padding: 0px 7px background-position: initial initial background-repeat: initial initial " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.174 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.014 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" Over /span /p /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.056 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 5 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px background-color: yellow padding: 0px 7px background-position: initial initial background-repeat: initial initial " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.161 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.001 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" Over /span /p /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.043 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 6 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px background-color: yellow padding: 0px 7px background-position: initial initial background-repeat: initial initial " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.108 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.052 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.01 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" Over /span /p /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 7 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.125 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.035 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.007 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 8 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.127 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.033 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.009 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 9 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.139 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.021 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 0.021 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:20px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 10 /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px background-color: yellow padding: 0px 7px background-position: initial initial background-repeat: initial initial " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" 14.115 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.045 /span /p /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" -0.003 /span /p /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 20" p style=" text-align:center" span style=" font-family: 宋体" Over /span /p /td td style=" border: none " width=" 0" height=" 20" br/ /td /tr tr style=" height:21px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 21" p style=" text-align:center" span style=" font-family: 宋体" 均值 /span span style=" font-family: 宋体" ( /span span style=" font-family: 宋体" 微米 /span span style=" font-family: 宋体" )& nbsp /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" p style=" text-align:center" span style=" font-family: 宋体" 14.139 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td style=" border: none " width=" 0" height=" 21" br/ /td /tr tr style=" height:21px" td width=" 113" nowrap=" " style=" border-style: none solid solid border-right-color: windowtext border-bottom-color: windowtext border-left-color: windowtext border-right-width: 1px border-bottom-width: 1px border-left-width: 1px padding: 0px 7px " height=" 21" p style=" text-align:center" span style=" font-family: 宋体" & nbsp /span span style=" font-family: 宋体" 标准差 (微米)& nbsp /span /p /td td width=" 95" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" p style=" text-align:center" span style=" font-family: 宋体" 0.021 /span /p /td td width=" 94" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td width=" 80" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td width=" 91" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td width=" 50" nowrap=" " style=" border-style: none solid solid none border-bottom-color: windowtext border-bottom-width: 1px border-right-color: windowtext border-right-width: 1px padding: 0px 7px " height=" 21" br/ /td td style=" border: none " width=" 0" height=" 21" br/ /td /tr /tbody /table p span style=" font-family: 宋体" & nbsp /span /p p style=" text-indent:29px" span style=" font-family:宋体 color:#0070C0" 【 strong 进阶知识6 /strong 】粒度测量误差的表述及误差的统计理论。人们都希望测量误差越小越好,但是误差却不可避免。误差可分为三类:一是系统误差,二是随机误差,三是疏忽误差。系统误差是指测量系统(包括测量设备和操作者)对一个物理量的进行多次测量得到的平均值与该物理量真值之间的偏离。随机误差是多次测量中的某一次测量值对多次测量平均值的偏离。系统误差反映测量系统的准确性( /span strong span style=" font-family:宋体 color:#0070C0" Accurac /span /strong strong span style=" font-family:宋体 color:#0070C0" y /span /strong span style=" font-family: 宋体 color:#0070C0" ),随机误差反映测量系统的精度( /span strong span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" Precision /span /strong span style=" font-family:宋体 color:#0070C0" )或重复性。在实际操作中,误差一方面来源于测量仪器本身,另一方面来源于操作,包括取样误差,操作失误等等。在颗粒仪器行业,为了客观地考察仪器,尽量避免人为影响,一般采用一次投样,重复测量,考察每次测量结果相对于多次测量的平均值之间的误差来评估仪器精度或重复性。 /span span style=" font-family:宋体 color:#0070C0" 而把不同次取样甚至不同操作者测量同一个样品得到的结果之间的相对误差,叫做再现性 /span span style=" font-family:宋体 color:#0070C0" ( /span strong span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" Reproductivity /span /strong span style=" font-family:宋体 color:#0070C0" )。重复性和再现性都反应随机误差的大小。疏忽误差是指测量仪器处于不正常状态或者操作者操作错误得到的测量结果与真值之间的偏差。这里不讨论此类误差。 /span /p p style=" text-indent:29px" span style=" font-family:宋体 color:#0070C0" 粒度测量与其他物理量的测量相比有两个特殊性:一是大多数情况下,粒度不存在或者难以确定真值。这是因为多数情况下颗粒的形状是不规则的,客观上不存在一个真实的“直径”。所谓的颗粒直径都是等效的圆球直径。等效的原理不同,结果也不同;甚至等效的原理相同,数据处理的方法不同,也会造成结果的差异,此其一(关于激光粒度仪的等效粒径,作者曾进行过初步研究,有兴趣的读者可参考“张福根等.棒状和片状颗粒在激光粒度仪中的等效粒径(一)、(二).中国颗粒学会首届年会论文集,1997,267-278”)。其二,即使颗粒是圆球形的,但是粗细不均,客观上也难以用绝对方法(指更可靠、更高精度的方法,比如显微镜)测定足够多的颗粒,最终给出在计量学上有说服力的真值。粒度只有在一种很特殊的情况下才能在一定误差范围内获得真值,这就是粒度分布很窄(称为“单分散”)的圆球形颗粒。现在都用这样的颗粒制作微粒标准物质( /span strong span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" Reference Material /span /strong span style=" font-family:宋体 color:#0070C0" )。所以颗粒测量仪器声称的“准确性”,都是相对于单分散的标准物质来说的。用户需要注意的是,两台不同的粒度仪测标准样时都足够准确,但测量实际样品却可能得出不一样的结果。这是许多用户很费解的事。原因就在于颗粒形状的不规则、大小的不均匀和数据反演算法的差异。 /span /p p style=" text-indent:29px" span style=" font-family:宋体 color:#0070C0" 第二个特殊性是,粒度测量结果的完整表述是由一组数(往往达到几十个)组成的粒度分布,而不是一个数,因此就存在用哪个数或哪几个数来衡量测量误差的问题。通常用平均粒径(如D[4,3]、D[3,2]或者D50,以及上下边界(累积)粒径D10、D90的测量误差来衡量。用户如果有特别关注的某个测量值,比如说碳酸该行业的2µ m以细的含量,也可以用这个测量值的误差来衡量仪器误差。 /span /p p style=" text-indent:29px" span style=" font-family:宋体 color:#0070C0" 下面再谈误差的表达的问题。用标准误差表达重复性或者再现性已经在正文做过简单介绍。这里再补充几点: /span /p p style=" text-indent: 2em " span style=" font-family:宋体 color:#0070C0" (1)置信度和置信区间 /span /p p style=" text-indent:29px" span style=" font-family:宋体 color:#0070C0" 正文已经谈到,单次测量值落在 /span span style=" font-family:Symbol color:#0070C0" ` /span span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" a-S, /span span style=" font-family:Symbol color:#0070C0" ` /span span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" a+S /span span style=" font-family:宋体 color:#0070C0" 区间内的概率是 /span span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" 68.3% /span span style=" font-family:宋体 color:#0070C0" 。这个区间又叫置信区间, /span span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" 68.3% /span span style=" font-family:宋体 color:#0070C0" 叫做置信度。这里假设了误差的分布满足正态分布规律(注意,这是误差分布,不是粒度分布)。根据概率论中的中心极限定律,如果测量误差是由多个相互独立的因素引起的,只要因素的数量足够多,那么误差的概率分布就满足正态规律。正态分布曲线见下图 /span span style=" font-family:& #39 Cambria& #39 ,& #39 serif& #39 color:#0070C0" , /span span style=" font-family:宋体 color:#0070C0" 一定区间范围内曲线以下的阴影面积就代表发生在该区间内的测量值的概率。 /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 由此我们可以推断出,测量值落在μ /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " -2σ,μ+2σ /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 区间内的概率是 /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " 95.4% /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " ,μ /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " -3σ,μ+3σ /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 的概率是 /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " 99.7% /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 。μ /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " -σ,μ+σ /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 、μ /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " -2σ,μ+2σ /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 或μ /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " -3σ,μ+3σ /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 叫做测量值的置信区间,对应的 /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " 68.3% /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 、 /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " 95.4% /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 和 /span span style=" font-size: 16px font-family: Cambria, serif color: rgb(0, 112, 192) " 99.7% /span span style=" font-size: 16px font-family: 宋体 color: rgb(0, 112, 192) " 称为相应的置信区间内的置信度。 /span /p p style=" text-align:center" img src=" https://img1.17img.cn/17img/images/201808/insimg/a45cdca6-a484-4a8d-83ee-30adc265602d.jpg" title=" 专栏5图2.jpg" / /p p style=" text-align:center" span style=" font-family:宋体 color:#0070C0" 随机误差的概率分布 /span /p p style=" text-indent: 2em " span style=" font-family:宋体 color:#0070C0" (2)方均根误差与标准误差 /span /p p style=" margin-left: 29px text-align: center " span style=" font-size:14px font-family:& #39 Calibri& #39 ,& #39 sans-serif& #39 " img src=" https://img1.17img.cn/17img/images/201808/insimg/18f3b470-d0b2-49f0-b9b5-22caa8d02452.jpg" title=" 专栏5图3.png" / /span /p p style=" margin-left:29px" span style=" color: rgb(0, 112, 192) font-family: 宋体 font-size: 16px " 显然,标准误差大于均方根误差。当n趋于无穷时,二者趋于一致。 /span /p p style=" text-indent: 2em " span style=" font-family:宋体 color:#0070C0" (3)t分布 /span /p p span style=" font-family:宋体 color:#0070C0" & nbsp & nbsp & nbsp /span span style=" font-family:宋体 color:#0070C0" 可以想象,如果我们用n次测量的平均值 /span span style=" font-family: 宋体" a /span span style=" font-family: PMingLiU, serif" ? /span span style=" font-family:宋体 color:#0070C0" 作为测量的报告值,那么一般而言随机误差会减少。具体会减小多少?或者说置信区间和置信度会发生什么变化?需要用到概率论的t分布函数,有兴趣的读者可以自行参考有关书籍。 /span /p p style=" text-indent:28px" strong span style=" font-family:宋体" 适用多种类型的分散介质 /span /strong /p p style=" text-indent:29px" span style=" font-family:宋体" 绝大部分粒度仪都需要把待测颗粒分散在介质中才能测量。具体选择什么介质,首先取决于颗粒本身的特性,比如颗粒与介质不能发生化学反应,能在介质中良好分散等等。其次是介质的使用成本,越低越好。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" 激光粒度仪测量颗粒时,既可用液体介质(称为“湿法分散”)也可用气体介质(称为“干法分散”),其中液体介质可以是最常见的水,也可以是各种有机溶剂。从而为用户选择适用且经济的介质提供便利。 /span /p p style=" text-indent:28px" strong span style=" font-family:宋体" 操作方便 /span /strong /p p style=" text-indent:29px" span style=" font-family:宋体" 不论使用什么类型的仪器,粒度测量都需要操作者认真仔细地进行,否则就可能引入人为误差。相对而言,激光粒度仪相较于其他粒度仪,操作起来要方便得多。主要表现在: /span /p p span style=" font-family:宋体" & nbsp & nbsp /span span style=" font-family:宋体" (1)对大多数激光粒度仪而言,不需要调整仪器量程。由于动态范围大,0.1微米至1000微米的任何样品都可以在仪器固有的量程范围内完成,无需预先估计样品的粒度分布范围,然后设置好仪器的量程才能测量(目前个别品牌的激光粒度仪还需要选量程,但大多数不需要)。作为对比,电阻法仪器、图像法仪器、沉降法仪器等等,都需要选择量程。 /span /p p & nbsp & nbsp & nbsp span style=" font-family:宋体" ( /span 2 span style=" font-family:宋体" )对分散介质的纯度没有太高要求。这是因为激光粒度仪在测量中有一个“减背景“的操作,杂质颗粒形成的散射光的影响在一定范围内可以通过这个操作消除掉。 /span /p p style=" text-indent:21px" span style=" font-family:宋体" ( /span 3 span style=" font-family:宋体" )一次测量所用的样品量较大,代表性好。另外样品浓度对测量结果的影响也较小。 /span /p p & nbsp & nbsp span style=" font-family:宋体" ( /span 4 span style=" font-family:宋体" )大多产品都具有 /span SOP span style=" font-family:宋体" 功能,进一步降低了操作人员和操作手法不一致带来的测量结果差异。 /span /p p style=" text-indent:28px" strong span style=" font-family:宋体" 局限性 /span /strong /p p style=" text-indent:29px" span style=" font-family:宋体" 上面介绍了激光粒度仪的诸多优点。凡事有优点必然就有缺点。以下是激光粒度仪的缺点: /span /p p style=" text-indent:29px" span style=" font-family:宋体" (1)分辨率低:所谓分辨率是指仪器分辨两个不同粒径的单分散样品的能力。行业一般认为激光粒度仪只能区分粒径相差 /span span style=" font-family:宋体" 3 /span span style=" font-family:宋体" 倍的两个单分散样品。比如把一个 /span span style=" font-family:宋体" 5 /span span style=" font-family:宋体" 微米的样品和 /span span style=" font-family:宋体" 15 /span span style=" font-family:宋体" 微米的样品混合起来,仪器可以测出两个分布的峰。分辨率优异的品牌能够做到 /span span style=" font-family:宋体" 1.5 /span span style=" font-family:宋体" 倍左右。在实用中,需要去区分两个粒径相近的单分散样品的情况很少见,但是分辨率低意味着仪器对样品分布宽度的变化不敏感。有些对粒度均匀性要求很高的样品(比如单分散的标准微球、激光打印机用的碳粉等等)就不适合用激光粒度仪测量了。 /span /p p style=" text-indent:29px" span style=" font-family:宋体" (2)对处在样品的粒度分布范围两端的颗粒不敏感。这是因为激光粒度仪直接测量的是所有颗粒散射光分布叠加在一起的结果,处在粒度分布两端的颗粒占总颗粒的比例很低,例如0.1%,对总光能的贡献很小,容易被噪声淹没。因此用户如果很关注Dmax和Dmin,那么就要注意,激光粒度仪给出的这两个数值是不可靠的。 /span /p p & nbsp & nbsp strong 编者结: /strong span style=" font-family:宋体" 在本文中,张福根博士一根妙笔对激光粒度仪的优势和局限娓娓道来。在下篇系列文章中,张福根博士就激光粒度仪研究界的几个前沿技术问题与大家深度剖析,精彩不容错过! /span /p p style=" text-align: right " span style=" font-family:宋体" (作者:张福根) /span /p























 我要推广仪器
我要推广仪器
 下载APP
下载APP