宁波材料所在柔性有机太阳能电池领域取得进展
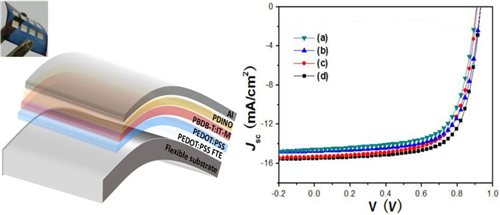
p 有机太阳能电池具有质轻、柔性、成本低、弱光响应等优点,是当前太阳能电池技术的前沿热点研究方向。高效率﹑耐弯折和廉价的柔性有机太阳能电池在柔性可穿戴和便携式电子设备、光伏建筑一体化和军事等领域具有很强的应用潜力。目前,大多数有机太阳能电池的研究结果都是基于刚性的氧化锡(ITO)玻璃基板。但有机太阳能电池如果要实现商业化应用,其真正的优势是采用低成本的湿法印刷和卷对卷大面积工艺制造。在有机太阳能电池中,最常用的电极材料是铟掺杂的氧化锡(ITO)。然而,ITO在塑料基板上存在导电性差和机械脆性等问题,而且ITO通常在高温下通过真空溅射进行加工,这使得其价格昂贵,并且不利于采用大面积印刷和卷对卷来制备。已经有一些报道采用新的电极材料来代替传统ITO,如纳米银线、石墨烯、碳纳米管、导电聚合物等,其中聚(3,4-亚乙基二氧噻吩):聚(苯乙烯磺酸)(PEDOT:PSS)薄膜的成本相对较低,并且该薄膜表现出高光学和电学特性、优异的热稳定性、良好的柔韧性等。利用酸掺杂PEDOT:PSS可以大幅提高其导电率,但目前报道的大多数采用强酸如硫酸、硝酸等进行掺杂,再进行高温后处理,容易损伤PET等柔性塑料基板。/pp 近日,中国科学院宁波材料技术与工程研究所研究员葛子义团队在前期高效率有机太阳能电池研究的基础上(Nature Photonics, 2015, 9, 520 Advanced Materials, 2018, 30, 1703005 Macromolecules, 2018, DOI: 10.1021/acs.macromol.8b00683 Journal of Materials Chemistry A, 2018, 6, 464),在柔性有机太阳能电池领域又取得新进展,创新性地开发了低温酸处理PEDOT:PSS电极替代需要高温溅射且昂贵的ITO电极。通过低温甲磺酸处理来提高PEDOT:PSS薄膜的导电性、降低薄膜的粗糙度,同时避免传统的强酸处理对柔性塑料衬底的破坏。进而利用全溶液加工技术,采用PBDB-T和IT-M非富勒烯活性层,制备了全湿法加工非ITO的单结柔性有机太阳能电池,电池的能量转换效率达到10.12%,这是迄今报道的全湿法加工的柔性有机太阳能电池的最高效率。而且这类全溶液加工的柔性有机太阳能电池非常符合卷对卷印刷和刮涂等大面积制备工艺的技术要求,为有机太阳能电池低成本柔性化制备提供了重要的参考途径。该项工作以All Solution-Processed Metal Oxide-Free Flexible Organic Solar Cells with Over 10% Efficiency 为题发表在国际期刊《先进材料》(Advanced Materials)上。葛子义和团队成员樊细为该论文的共同通讯作者,硕士生宋伟为第一作者。/pp 上述研究得到了国家重点研发计划(2017YFE0106000和2016YFB0401000)、国家自然科学基金(51773212, 21574144和21674123)、中科院前沿科学重点研究项目(QYZDB-SSW-SYS030)、中科院重点国际合作项目 (174433KYSB20160065)、中科院交叉创新团队、浙江省杰出青年基金(LR16B040002)和宁波市科技创新团队(2015B11002,2016B10005)等资助。/pp style="text-align: center "img title="W020180523579124813794.png" src="http://img1.17img.cn/17img/images/201805/insimg/b0085859-db45-42e0-b92f-b5f1ebccc183.jpg"//pp style="text-align: center "图:柔性有机太阳能电池的结构示意图和光伏特性曲线/p














 我要推广仪器
我要推广仪器
 下载APP
下载APP