
[color=#990000]摘要:为充分发挥手套箱的强大功能,针对手套箱中真空度和温度这两个环境变量,本文详细介绍了准确测量和控制真空度和温度的一体化解决方案,描述了上游、下游、双向和切换控制模式在不同真空度范围内的具体应用,同时还展示了控制中用到的新型数控针阀、数控球阀和24位超高精度PID控制器。[/color][align=center][color=#990000][img=真空手套箱,690,365]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111350205454_339_3384_3.png!w690x365.jpg[/img][/color][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#990000]1. 问题的提出[/color][/size] 真空手套箱常用于极易氧化和潮解物质在无氧无水环境下需要人工操作的化学反应、材料处理和性能测试,功能十分强大。手套箱的核心功能是提供真空环境和便于人工操作,但在目前的实际应用中,大多只用了手套箱的无氧环境和人工操作功能,并没有充分发挥手套箱的作用。手套箱更强大的应用还体现在以下两方面: (1)真空手套箱是一个密闭式环境箱,极限真空度一般都可以达到10Pa左右,由此可以将手套箱内的真空度按照要求控制在10Pa至一个大气压之间的任何设定点上,这就可以进行各种对真空度敏感的化学反应、试验和测试,并便于在不改变和破坏真空环境的条件下进行各种人工操作。 (2)除真空度外,温度也是很多反应、试验和测试的另一个重要环境变量。在手套箱中放置相应的加热装置,就可以进行温度和真空度复合环境下的各种试验研究。以此类推,还可以配置其他物理量环境条件,形成多种边界条件下的多物理量耦合试验条件。 为充分发挥真空手套箱的强大功能,针对手套箱中真空度和温度这两个环境变量,本文详细介绍了准确测量和控制真空度和温度的一体化解决方案,并针对不同真空度范围介绍了真空度控制过程中的上游、下游和双向控制模式。[size=18px][color=#990000]2. 手套箱的真空度控制[/color][/size] 手套箱属于一种低真空环境腔体,采用机械泵一般手套箱的真空度最高可达绝对压力10Pa左右,通过抽真空和充惰性气体,由此手套箱的真空度可以控制在10Pa至一个大气压(绝对压力0.1MPa)的范围内。在如此跨越四个数量级的真空范围内进行控制,会根据实际需要采用不同精度的真空度传感器,相应就有不同控制模式。以下为各种控制模式的具体内容。[size=16px][color=#990000]2.1 上游控制模式[/color][/size] 如图1所示,在保持下游真空泵抽速恒定的条件下,上游控制模式是根据真空计测量信号,通过PID真空压力控制器调节上游进气口电动针阀的开度,即通过控制进气流量使手套箱内的压力控制在设定值。上游模式常用于高真空度控制。[align=center][img=真空手套箱,500,523]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111357256824_7565_3384_3.png!w690x722.jpg[/img][/align][align=center][color=#990000]图1 上游控制模式结构示意图[/color][/align][size=16px][color=#990000]2.2 下游控制模式[/color][/size] 如图2所示,在保持下游真空泵抽速恒定的条件下,下游控制模式是根据真空计测量信号,通过PID真空压力控制器调节下游出气口电动球阀的开度,即通过控制出气流量使手套箱内的压力控制在设定值。下游模式常用于低真空度控制。[align=center][img=真空手套箱,500,431]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111357506722_4691_3384_3.png!w690x595.jpg[/img][/align][align=center][color=#990000]图2 下游控制模式结构示意图[/color][/align][size=16px][color=#990000]2.3 双向控制模式[/color][/size] 上述上游和下游控制模式各有优势,在实际应用中很少单独使用,一般都是将上游和下游模式集成在一起用,即所谓的双向控制模式,如图3所示。在双向控制模式中,要求真空压力控制器具有正反向控制功能,即对上游电动针阀用反向控制,对下游电动球阀用反向控制。[align=center][img=真空手套箱,500,408]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111358058160_7167_3384_3.png!w690x564.jpg[/img][/align][align=center][color=#990000]图3 双向控制模式结构示意图[/color][/align][size=16px][color=#990000]2.4 双传感器自动切换模式[/color][/size] 如前所述,如果在10Pa~0.1MPa全范围内进行真空度的准确测量和控制,一般需要配置1000Torr和10Torr两只高精度的电容薄膜真空计,由此在控制过程中就需要进行传感器的自动切换。如图4所示,高切换点(2-3) 是低真空传感器工作的高点,低切换点(1-2) 是高真空传感器工作的低点,在这两点之间控制器进行平滑计算。当低真空测量值PV1和高真空测量值PV2的连续采样低于下切换点,切换到低真空传感器。当低真空测量值PV1和高真空测量值PV2的连续采样高于上切换点,则切换到高真空传感器。[align=center][img=真空手套箱,500,332]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111358269424_623_3384_3.png!w690x459.jpg[/img][/align][align=center][color=#990000]图4 双传感器自动切换过程示意图[/color][/align][size=18px][color=#990000]3. 真空计、阀门和控制器的选择[/color][/size][size=16px][color=#990000]3.1 真空度传感器的选择[/color][/size] 与其他任何传感器一样,各种真空度传感器也同样具有一定的测量范围和精度,基本规律也是测量范围宽的传感器,精度较差;测量精度高的传感器,测量范围较窄。对于手套箱,如图5所示,所采用的真空度传感器一般有以下三类: (1)常规真空计:皮拉尼真空计,精度为满量程的±(15~50)%,但一只真空计可覆盖全量程。 (2)高精度真空计:电容薄膜真空计,精度为满量程的±2.5%,如果覆盖10Pa~0.1MPa范围,一般需要配置1000Torr和10Torr两个真空计。 (3)超高精度真空计:半导体真空计,精度为满量程的±0.05%,有效量程为50Pa ~0.1MPa,无法覆盖较高真空。[align=center][img=真空手套箱,690,220]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111358455209_397_3384_3.png!w690x220.jpg[/img][/align][align=center][color=#990000]图5 三类真空度传感器:(a)皮拉尼计、(b)电容薄膜规、(c)半导体真空计[/color][/align][size=16px][color=#990000]3.2 电动阀门的选择[/color][/size] 在手套箱真空度控制中,一般会涉及两类阀门:一类是调节进气端流量的进气阀门,另一类是调节排气流量的排气阀门。进气阀门多用来进行小流量调节,因此一般选择针型阀;排气阀门多用来进行抽真空,因此一般要求使用口径较大的球形阀。由于要进行自动控制,无论是针型阀和球形阀,都要求可以用直流电压、直流电流或数字信号(RS485)进行驱动,即所谓的电动阀门或电子阀门。 电动针型阀选择小尺寸的步进电机驱动的电动针阀,如图6所示。这种电动针阀具有较高的响应速度(1s以内)和线性度(1%以内)。[align=center][color=#990000][img=真空手套箱,450,335]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111359021706_9837_3384_3.png!w603x449.jpg[/img][/color][/align][align=center][color=#990000]图6 电动针型阀[/color][/align] 电动球阀选择微型电动球阀,如图7所示。这种电动球阀同样具有较高的响应速度(7s以内),也可以选择开关时间1s以内的高速电动球阀。[align=center][img=真空手套箱,236,300]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111359189541_1861_3384_3.png!w315x400.jpg[/img][/align][align=center][color=#990000]图7 电动球阀[/color][/align][size=16px][color=#990000]3.3 控制器选择[/color][/size] 从上述手套箱真空度的各种控制模式可以看出,真空度的控制过程对控制器提出了很高的要求,如图8所示,所选择的控制器要满足以下几方面的要求:[align=center][color=#990000][img=真空手套箱,500,373]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111359333538_669_3384_3.png!w600x448.jpg[/img][/color][/align][align=center][color=#990000]图8 超高精度PID控制器[/color][/align] (1)最起码是PID控制器,并具有PID参数自整定功能。 (2)真空计自身精度较高,为充分发挥真空计测量精度,需要数据采集和控制的PID控制器通用要具有较高精度,建议控制器为24位A/D采集,16位D/A输出。 (3)至少2通道以上,实现温度和真空度同时测量及控制,并减小安装空间。 (4)多种输入信号接入功能,可直接连接热电偶、热电阻、直流电压等不同类型传感器的输入信号,实现不同参量的同时测试、显示和控制。 (5)正反向控制功能,以实现双向控制模式。 (6)具有双传感器切换功能,每一个通道都可支持温度高低温和高低真空度的双传感器切换,两通道可形成总共接入四只传感器的控制组合。 (7)程序控制功能,可自行建立和存储多个控制程序,使用时只需选择调用即可开始(程序控制模式)。 (8)具有通讯接口与计算机连接,如标准MODBUS协议的RS485接口等。[size=18px][color=#990000]4. 手套箱的温度控制[/color][/size] 手套箱除了可以提供真空环境之外,还可以在手套箱内放入加热装置进行不同温度下的各种试验和测试,由此就需要在手套箱应用中引入温度控制功能。 温度控制是一种非常成熟的经典技术,一般是结合温度传感器采用PID控制器予以实现。为了造价和安装体积的降低,一般是采用一个多通道PID控制器同时进行温度和真空度的控制,控制器与计算机通讯以显示和存储测量控制数据和曲线。 手套箱内的工作温度一般要求不能太高,但如果做好隔热防护和冷却,也可以实现1000℃以上的工作温度范围。温度测量传感器一般选择热电偶,如果对测量精度要求较高,也可以选择热电阻和热敏电阻温度传感器,这些传感器都可以直接与上述高精度PID控制器连接使用。[size=18px][color=#990000]5. 总结[/color][/size] 通过上述内容的介绍,基本讲清楚了手套箱中真空度和温度的各种控制方法和所涉及的主要传感器、电动阀门和PID控制器。在具体应用中,可以针对具体手套箱结构和功能进行局部改进,也可以根据实际要求进行手套箱的整体设计、安装和集成。 尽管本文只介绍了手套箱中真空度和温度的测量和控制,但这些方法和具体实施内容也可以推广应用到对气氛环境比较敏感的其它领域内的试验参量控制,如低温、几何量、光学和声学等领域。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [align=center][img=真空手套箱,690,308]https://ng1.17img.cn/bbsfiles/images/2021/12/202112111352279951_3805_3384_3.jpg!w690x308.jpg[/img][/align]
Lab2000手套箱是由伊特克斯惰性气体系统(北京)有限公司http://www.etelux.com设计生产的标准手套箱,伊特克斯还设计生产其他多种型号的真空手套箱,可根据客户需求定制手套箱系统。Lab2000手套箱性能:不锈钢箱体设计,钢化玻璃或聚碳酸酯前窗指标:水、氧<1PPM泄漏率:≤0.05vol%/h电磁阀采用模块化设计,泄漏率降低,更换方便。带滑动托盘的大过渡舱,过渡舱门设计独特,轻巧、开启方便省力,操作简单。GP-20惰性气体的净化系统SIEMENS微控制器SIEMENS操作触摸屏幕:易于进入各功能数据备忘录:自动记录系统数据闭合气体循环,无油和真空脚踏代替手动调节压力控制全不锈钢气体流量管道及配件BOC EDWARDS RV8真空泵HEPA高效率滤器自动压力控制,工作气压可设定在范围+/-15mbar数字压力传感器高低可调式支架方便移动的可调脚轮带防反射膜的灯罩联系电话:18613800921 朱先生
标准手套箱 标准手套箱为完整的、可直接使用的手套箱系统,可用于高校科研或大规模工业生产应用。 可用的标准手套箱系列为: 研发型 LAB2000 和 生产型 MB200G 伊特克斯公司为标准手套箱提供了多种标准配件。例如,低温冰箱,微型过渡舱,高温烘箱,溶剂吸附装置,以及 O2 和 H2O分析仪。性能与规格有三种宽度:1200mm (47"), 1800mm (71"), 和2400mm (94")。 特别为手套箱设计的双重微处理器控制器,所有重要信息显示在同一个屏幕上,方便操作(如果有触摸屏,也可由微机控制)。 转速为0-60cfm的不锈钢风机控制循环。 手套箱设计性能为将环境控制在含氧量1ppm,含水量1ppm。这一过程通过装有自动阀门的,安装方便的空气净化系统实现。 安装一个大的过渡舱,可选择自动控制装置。也可以安装快速转移仓。 真空泵。 0.3 微米的进口和出口过滤器。 标准的或定制的手套箱支架。 系统交货时已经充有氮气、氦气或者氩气,可随时可用。 研发型 LAB2000 完整的惰性气体系统,包括标准手套箱,集成气体净化系统,大型标准过度舱, PLC 程序逻辑控制系统和操作面板. SP 型提供单净化柱 DP 型提供双净化柱以便于连续操作 Etelux工作站系列有多种规格和配件以满足不同领域的需求. 适用于研发以及部分生产领域. 生产型 MB200G 完整的惰性气体系统,包括标准手套箱,外置气体净化系统,大型标准过度舱, PLC 程序逻辑控制系统和操作面板。灵活的标准模块化手套箱设计可适应特殊的系统要求 。 SP 型提供单净化柱 DP 型提供双净化柱以便于连续操作 Etelux工作站系列有多种规格和配件以满足不同领域的需求. 适用于研发以及部分生产领域. 五、联系方式公司名称:伊特克斯惰性气体系统(北京)有限公司联系人:郭运国联系电话:86-10-62718129(0)13701251980邮箱:hr@gloveboxes.com.cn网址:http://www.etelux.com.cn http://www.gloveboxes.com.cn 联系地址:北京市昌平区回龙观邮编:100092
惰性气体手套箱特点http://www.zhonghuida.com/imageRepository/b2399455-c5f9-40bc-a792-bd8e0c942fec.png 保持惰性气体环境,控制水氧含量〈1 PPM 气体净化系统可自动再生 PLC 控制系统,彩色触摸屏操作界面 高质量气体控制和真空组件 多种配置和尺寸系统可供选择 气体纯化装置配备可移动框架 可根据客户特殊应用定制不同手套箱系统 可集成溶剂纯化系统 技术参数http://www.zhonghuida.com/imageRepository/cba240b3-6ab9-48fb-ab60-63439ff04636.png控制系统• 采用PLC控制器,所有功能可通过彩色触摸屏操作界面设置• 采用微处理控制器带LED滚动面板操作界面• 可用脚踏开关调节箱体压力• 电源要求: 230V, 50-60Hz, 10A• 电源功率随附件不同而不同净化再生• 净化柱可再生,所有过程通过PLC或者微电子 控制系统自动进行• 再生气体: N2/H2混合气 (3-7% H2) 或者Ar/H2混合气 (3-7% ) H2)循环系统• 真空密封集成无油鼓风机• 可调风速 0-60 CFM手套箱体• 模块化面板设计• 手套箱材料 – US 304 不锈钢• 内部工艺 – 拉磨• 外表面 –灰色粉末涂层• 窗口 – 聚碳酸酯 (LEXAN), 厚度3/8”倾斜型减少反光• 照明 –前置荧光灯• 泄漏率 0.05 vol%/h (ISO 10648-2)气体净化系统• 闭路循环气体移除水和氧• 内部工作气体: N2, Ar 或者 He• 水氧含量: O21ppm, H2O1ppm• 标准配置单净化柱,可选双净化柱• 净化能力(每柱)• 氧气去除能力 – 30L (标准条件) 水分去除能力 – 1300g• 净化柱材料: US 类型304不锈钢管 件• 循环系统管件 – 铜管, KF-40• 控制系统管件 – 铜管, 3/8”直径.不锈钢 (US类型 304) 循环和控制系统管件可选• 系统泄漏率: 10-5mbar l/s阀 门• 主要阀门 – 电子-气动, KF-40• 控制阀 – 电磁阀 (螺线管) 阀门线 路• 标准系统包括一个KF40阀门集成一路电线• 包括一个供客户使用的KF40法兰• 包括一个 3/8” 防水接头锁紧螺母
米开罗那的手套箱,上次在气体再生完之后有两三个月水氧值能控制在1ppm以下。最近氧气值都是在10ppm左右,降不下来,清洗到2-3ppm左右循环一个小时又升高到10ppm。这个情况再生能够降到1ppm以下吗?还是是氩气纯度不够高了啊?
一、在锂离子电池试验、生产、运输、使用过程中存在的安全问题以及比较关心的几种人:① 安全就是要了解材料(纯净物)或其成份(混合物)是否易燃、是否易爆、是否易反应、是否致病、是否剧毒、是否放射性、是否腐蚀性、是否易污染环境等等。② 运输者(可能泄漏),操作工人(可能接触),最终产品用户(使用安全),当然还有环保方面二、安全问题的解决办法 ① 锂离子电池的安全问题的解决,主要在试验和生产过程中。② 由于锂金属对水气及氧气具有极高的氧化性,因此,对于发展锂离子高分子电池基本条件、设备的要.求非常严格,不论在先前测试或组装,都必须在水、氧值浓度极低的环境下进行,例如手套箱(glove box)-----水、氧值浓度在1PPM左右。在锂电池的制造过程中,水是最大的敌人。水可能会使电解液发生分解,影响电池的性能。水还会和正负极材料发生反应,所以在电池注液时要求在水分含量很低的手套箱中进行,注液完毕封口后才能从手套箱内取出。三、相关安全措施------试验设备(操作环境) 手套箱(glovebox)又称超级净化手套箱、手套箱设计性能为将环境控制在含氧量1ppm,含水量1ppm。这一过程通过装有自动阀门的,安装方便的空气净化系统实现。性能与规格①有三种宽度:1200mm (47"), 1800mm (71"), 和2400mm (94")。 ②特别为手套箱设计的双重微处理器控制器,所有重要信息显示在同一个屏幕上,方便操作(如果有触摸屏,也可由微机控制)。 ③转速为0-60cfm的不锈钢风机控制循环。 ④手套箱设计性能为将环境控制在含氧量1ppm,含水量1ppm。这一过程通过装有自动阀门的,安装方便的空气净化系统实现。 ⑤安装一个大的过渡舱,可选择自动控制装置。也可以安装快速转移仓。 ⑥真空泵。 ⑦0.3 微米的进口和出口过滤器。 ⑧标准的或定制的手套箱支架。 ⑨系统交货时已经充有氮气、氦气或者氩气,可随时可用。四、公司介绍 ① 伊特克斯惰性气体系统(北京)有限公司成立于2004年2月,在清华大学留美归国博士Willian Li的支持下,引进吸收欧美技术,研制开发惰性气体保护设备,并于同年推出高性能手套箱走向市场,用于科技教育,大学科研、锂电行业、激光等行业用的手套箱,填补了国内长期依赖进口的历史,大大降低了采购成本,深受用户的信赖。 经过近两年的发展,于2006年4月成立伊特克斯惰性气体系统(北京)有限公司,专门从事惰性气体系统保护手套箱的研发、生产、销售与服务。 公司现有员工23人,本科及本科以上学历约占80%,其中专职技术开发人员12人。伊特克斯惰性气体系统(北京)有限公司与国内外多家著名的公司和科研院所建立了长期、友好的合作关系,技术实力不断壮大,产品不断推陈出新,并建立了长期稳定的技术互访、信息交流和人员培训等合作关系,为产品的先进性和企业的持续发展提供了强有力的技术支撑。 公司所生产的各类产品如:生化实验手套箱、锂电手套箱、特种灯生产用手套箱、溶剂过滤系统、溶剂纯化系统、气体净化系统等。已被航空航天、兵器、军工、电源、生化、物理、冶金、电子、材料等领域的50多家客户所采用,近年来60多台各类设备不但覆盖了国内大多数省份和地区,其市场服务网络已经覆盖了国内二十余个大中城市,并很快设有销售和售后服务的办事机构。 伊特克斯惰性气体系统(北京)有限公司,志存远大,伊特克斯人以无比的热情,永远不待的精神,始终秉承“为用户创造价值”的理念,通过不断创新,推动国家的实验环境设备、特殊行业的环节生产设备的制造水平而努力奋斗。五、联系方式 公司名称:伊特克斯惰性气体系统(北京)有限公司联系人:郭运国 联系电话:86-10-62718129 (0)13701251980 邮箱:hr@gloveboxes.com.cn 网址:http://www.etelux.com.cn http://www.gloveboxes.com.cn 联系地址:北京市昌平区回龙观邮编:100092

创新净化手套箱是通过高纯惰性气体的循环利用吸收装置吸收掉气体中的水氧,从而达到一个水氧含量1ppm的无水无氧标准,现发布部分资料如下:▪ 封闭箱体:304不锈钢板,厚度3mm 侧壁厚度4mm▪ 循环管道:304不锈钢管,DN40 ▪ 手套口: 阳极氧化铝▪ 照明:视窗前上方装有荧光灯▪ 大过渡舱:304不锈钢类型,厚度3mm,直径400mm, 长度600mm ▪ 小过渡舱:304不锈钢板,厚度3mm,直径150mm, 长度340mm▪ 净化系统:304不锈钢,可再生的净化材料,自动的再生程序▪ 压力控制:PLC自动控制.▪ 吸附装置:304不锈钢板,可更新填充净化材料▪ 循环:惰性气体▪ 再生:自动再生程序▪ 工作气体:氮、氩▪ 再生气体:氢气与惰性气体的混合气体,氢气约占5-10%▪ 电源要求:单相,220伏/50赫兹,国际标准电源希望各位达人不吝赐教.[img]http://ng1.17img.cn/bbsfiles/images/2005/10/200510081632_8559_1137070_3.jpg[/img]
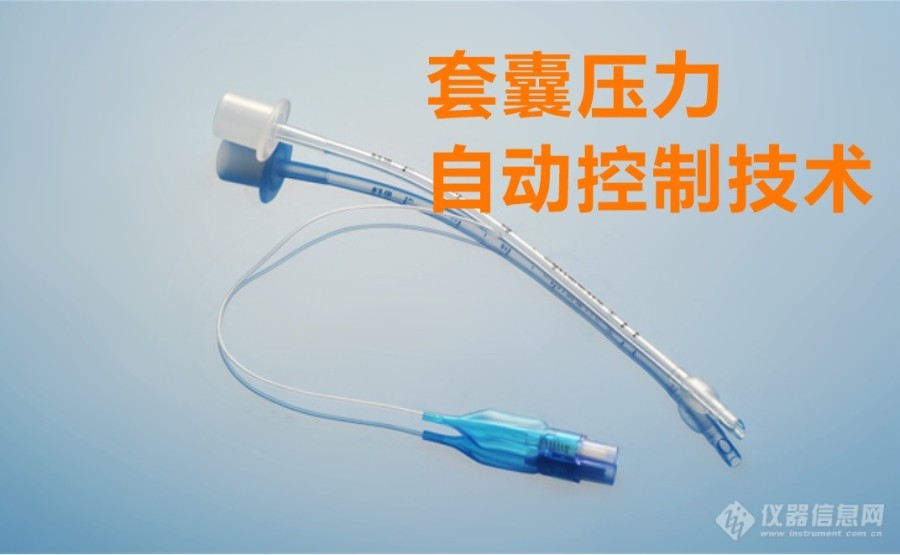
[color=#339999][b][size=16px]摘要:目前临床用气管导管[/size][size=16px]套[/size][size=16px]囊压力管理中缺乏操作简便和技术成熟的套囊压力自动控制仪器,现有压力测量和控制装置操作繁琐,存在充气增压和放气减压过程不及时和压力不稳定等问题。针对这些问题本文提出了[/size][size=16px]套[/size][size=16px]囊[/size][size=16px]压力自动控制解决方案,采用动态平衡原理的球囊压力控制仪可根据设定压力自动排气和进气,快速抑制各种干扰,使球囊压力始终处于稳定状态。控制仪配有面板显示屏和微型气泵,并可连接外置压力传感器,使控制更准确和直观。[/size][/b][/color][align=center][img=气管扩张球囊压力控制,600,369]https://ng1.17img.cn/bbsfiles/images/2023/08/202308031417449117_6777_3221506_3.jpg!w690x425.jpg[/img][/align][b][size=18px][color=#339999]1. 问题的提出[/color][/size][/b][size=16px] 气管导管套囊在机械通气中可起防止气道漏气,预防呼吸机相关性肺炎的作用,套囊压力管理是气管插管患者气道管理中的一个重要环节。由于气管导管套囊的压力异常与很多因素相关,如患者自身因素(肥胖、有吸烟史或合并哮喘、气管炎等)、麻醉医生因素和外在因素(体位、二氧化碳气腹、术中相关操作、笑气的应用等)以及呼吸机正常运行也会对套囊的压力产生影响。因此在套囊压力管理中,应当调节套囊中的压力以使其维持在一个稳定的水平,以避免漏气和其他潜在疾病的风险。套囊中压力过低可能产生漏气,而压力过高则可能对病人产生不适感。此外,在对套囊中压力进行调节时,也应当尽可能长时间维持套囊内压力稳定,降低套囊的不停膨胀和收缩的频率。但在目前的临床应用中套囊压力管理还无法达到稳定控制要求,所存在的问题主要体现在以下几个方面:[/size][size=16px] (1)外接压力测量和控制装置操作繁琐、器械及人力成本高。充气增压和放气减压过程用时长,压力调节缓慢,不利于抢救插管时快速操作,也不利于整个过程中的压力稳定。[/size][size=16px] (2)缺乏操作简便的套囊压力自动控制的成熟技术和相应仪器。[/size][size=16px] 为了解决上述问题,基于快速闭环气体压力控制技术,本文提出了一种解决方案,可完美的实现套囊压力的快速自动调节和控制。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 依据套囊的结构,临床气管导管套囊的压力控制,从理论上可以归结为对一个弹性体材质的密闭容器进行气压控制,此密闭容器只有一个对外进气或出气接口。由此,我们采用了动态平衡法进行压力控制,其基本原理如图1所示,即压力控制仪的核心是一个四通结构的小管件,其中管件的左右两端口分别作为进气和排气口,向上端口作为压力测量端口,向下端口作为工作压力输出口。[/size][align=center][size=16px][color=#339999][b][img=套囊压力控制仪工作原理,400,293]https://ng1.17img.cn/bbsfiles/images/2023/08/202308031419148618_9875_3221506_3.jpg!w690x506.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 套囊压力控制仪工作原理[/b][/color][/size][/align][size=16px] 在压力控制过程中,PID控制器采集压力传感器信号并与设定压力值进行比较,根据比较差值来驱动进气和出气电磁阀打开或关闭,由此来控制压力输出口处的压力快速达到设定压力值。[/size][size=16px] 根据上述原理制造的套囊压力控制仪实际上是一个自动控制的压力源,此压力源直接连接到气管导管上就能实现对套囊压力的准确控制。整个套囊压力控制装置结构如图2所示。[/size][align=center][size=16px][color=#339999][b][img=两种形式气管导管套囊的自动压力控制结构示意图,650,270]https://ng1.17img.cn/bbsfiles/images/2023/08/202308031419447144_9325_3221506_3.jpg!w690x287.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 两种形式气管导管套囊的自动压力控制结构示意图[/b][/color][/size][/align][size=16px] 在压力控制过程中,PID控制器采集压力传感器信号并与设定压力值进行比较,根据比较差值来驱动进气和出气电磁阀打开或关闭,由此来控制压力输出口处的压力快速达到设定压力值。[/size][size=16px] 这里需要说明的是,标准的压力控制仪是在控制仪中内置了一个高精度压力传感器,但在实际应用中压力传感器更靠近被控容器以准确测量容器压力,所以球囊压力控制器提供了一个外置压力传感器的接口,由此可更准确的调节和控制球囊内压力,如图2(a)所示。[/size][size=16px] 由于气管导管往往较细较长,图2(a)所示的外置压力传感器形式因距离球囊较远,往往也不能很准确和及时的监测和控制球囊压力。为此,目前新型的气管导管球囊往往会内置一个微型压力传感器,此内置压力传感器连接到球囊压力控制器可进行更准确和快速的压力控制。[/size][size=16px] 在球囊压力控制仪中集成了一个微型气泵以始终提供正压压力,在控制仪面板上还提供了一个手动调节旋钮。在具体使用过程中,操作人员可根据面板上显示的压力数值来调整旋钮以设定球囊所需要稳定控制的压力值,设定完毕后,按动执行按钮,控制仪就可以全程的进行球囊压力自动控制,无论其他形式的各种干扰,球囊压力始终稳定在设定的压力值上。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,本解决方案所采用的球囊压力自动控制仪,基于动态平衡的压力控制方法,可很方便的实现球囊进气和排气的自动控制,使球囊压力始终保持稳定,具有很强的各种压力干扰的抑制性和恢复性。并且此球囊压力控制仪进行了最大程度的集成,内置了压力传感器和气泵,并具有很强的适用性,可连接各种气管导管球囊和外部压力传感器。整个操作极为简便,仅需通过面板旋钮进行操作,压力监测和控制结果直观面板数字显示。[/size][size=16px][/size][align=center][size=16px][color=#339999][b]~~~~~~~~~~~~~~~[/b][/color][/size][/align]
[url=https://insevent.instrument.com.cn/t/bp][color=#3333ff]气质[/color][/url]质上前向压力控制与前向流量控制有何区别?如果柱流量一直保持1.0mL/min,选用哪个方式,有详细资料吗?
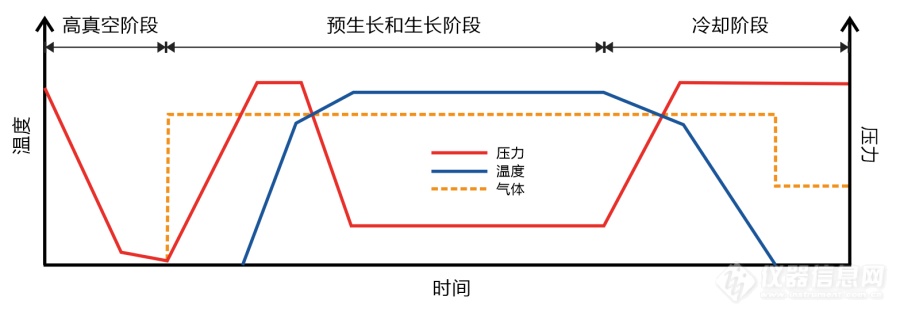
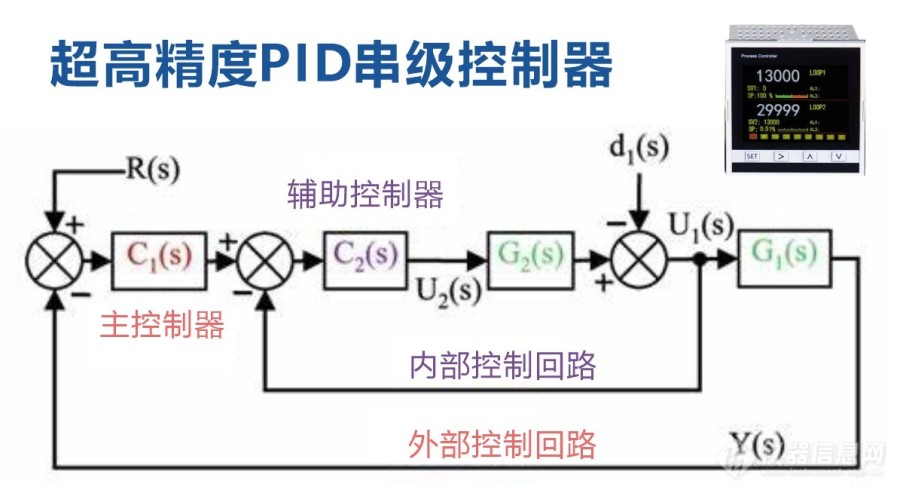
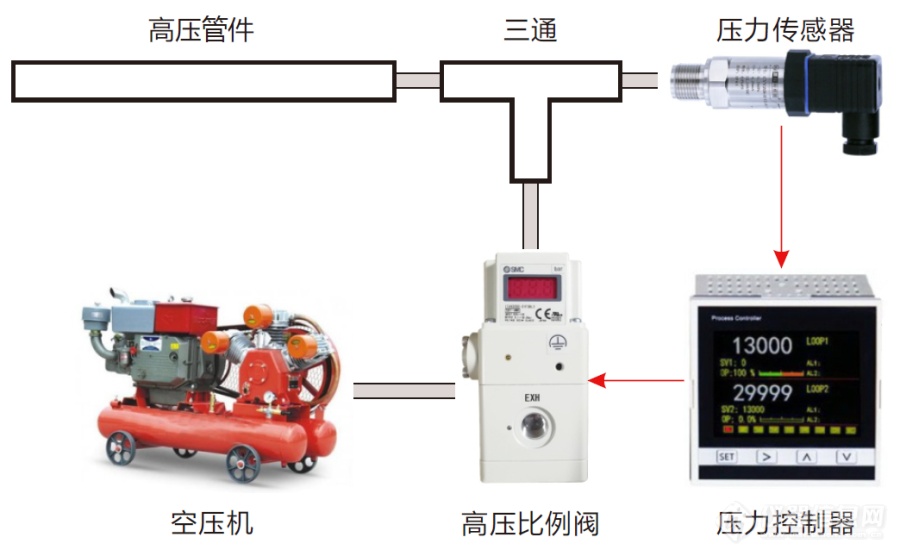
[color=#990000]摘要:本文针对目前PVT法SiC单晶生长过程中真空压力控制存在的问题,进行了详细的技术分析,提出了相应的解放方案。解决方案的核心方法是采用上游和下游同时控制方式来大幅提高全压力范围内的控制精度和稳定性,关键装置是低漏率和高响应速度的电动针阀、电动球阀和超高精度的工业用PID控制器。通过此解决方案可实现对相应进口产品的替代。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px]一、问题的提出[/size]碳化硅单晶材料,作为宽带隙半导体材料,具有优异的物理特性和电学性能,特别适合于制造高温、高频、大功率、抗辐射、短波长发光及光电集成器件,因此被广泛应用于航空、航天、雷达、通讯等领域。目前,碳化硅单晶的生长一般采用PVT法工艺。由于碳化硅单晶生长的最终目的是为了获取大尺寸、低缺陷的碳化硅单晶,随着碳化硅单晶的尺寸增大,对单晶炉内的真空压力控制要求极高,工艺气体的压力变化对SiC晶体的生长速度和晶体质量产生极大影响。图1所示为一典型SiC单晶生长工艺中压力、温度和工艺气体随时间的变化曲线。[align=center][color=#990000][img=01.碳化硅生长中随时间的压力、温度和气体变化过程,690,242]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161032399187_2475_3221506_3.png!w690x242.jpg[/img][/color][/align][align=center][color=#990000]图1 PVT法碳化硅单晶生长过程中压力、温度和气体的随时间变化过程[/color][/align]从图1所示的工艺曲线可以看出,晶体生长炉内的压力控制是一个全真空度范围的精密变化过程,整个真空度变化范围横跨低真空和高真空(10-4Pa~105Pa),特别是在10-1Pa~105Pa的低真空范围内需要精密控制。目前在利用PVT法制备SiC单晶时,普遍还存在以下几方面问题。(1)普遍采用下游模式(调节出气速率)控制全过程的真空度变化,在0.1~1000Pa的较高真空区间控制精度极差,晶体生长容器内的压力波动大(约±10%)。(2)真空控制装置所采用的调节阀和PID控制器基本都采用MKS、VAT和CKD等公司的上游流量控制阀(Upstream Flow Control Valves)、下游排气节流阀(Downstream Exhaust Throttle Valves)及其配套的PID阀门控制器(PID Valve Controllers)。尽管为了降低成本目前已有多种集成了PID控制器的一体式结构的下游排气节流阀,但整体造价还是较高。(3)真空压力国产化替代产品也在逐步兴起,但普遍还存在阀门漏率大、阀门调节响应时间长和不同量程真空计无法自动切换等问题,致使无法同时采用上游和下游控制模式实现全量程范围内的真空压力高精度控制。本文将针对上述PVT法SiC单晶生长过程真空压力控制存在的问题,进行详细的技术分析,并提出相应的解放方案。解决方案的核心是采用上游和下游同时控制方式来大幅度提高全压力范围内的控制精度和稳定性,并介绍相应的低漏率和高响应速度的真空用电动针阀、电动球阀和超高精度的工业用PID控制器,由此实现对相应进口产品的替代。[size=18px][color=#990000]二、碳化硅晶体生长的压力变成过程分析[/color][/size]图1所示为目前PVT法第三代碳化硅单晶生长过程中的压力、温度和气体流量变化曲线,其中红线表示了非常典型的真空压力变化过程。通过对真空压力各个阶段的变化过程进行分析,以期深入理解PVT法SiC单晶生长过程中对真空压力变化的要求。如图1所示,SiC单晶生长过程中真空压力的变化分为以下几个阶段:(1)高真空阶段:在高真空阶段,需要通过机械泵和分子泵在晶体生长容器内形成高真空(1×10-3Pa~1×10-5Pa),以清除容器和物料内的空气和水分。此高真空阶段要求气压需要以较慢的恒定速率进行降压,由此来避免碳化硅粉料形成扬尘。(2)预生长阶段:同理,在预生长阶段,随着工艺气体的充入和温度的逐渐升高,也要求容器内的气压按照恒定速率逐渐升至常压或微正压,此烘烤和气体置换进一步清除空气和水分。(3)生长阶段:在晶体生长阶段要求容器气压按照恒定速度逐渐降低到某一设定值(生长压力),并保持长时间恒定。不同的生长设备和工艺一般会采用不同的生长压力,专利“一种碳化硅晶体的破碎晶粒用于再生长碳化硅单晶的方法”CN114182357A中,生长压力为200~ 2000Pa;专利CN114214723A“一种准本征半绝缘碳化硅单晶的制备方法”中,生长压力为10000~80000Pa;专利CN215404653U“碳化硅单晶生长控制装置”中,生长压力控制在0.2~0.7Pa范围内;专利CN217231024U“一种碳化硅晶体生长炉的压力串级控制系统”中,生长压力范围为100~500Pa。由此可见,所涉及的生长压力是一个从0.2Pa至80kPa的宽泛区间。(4)冷却阶段:在冷却阶段,随着温度的逐渐降低,要求容器内的气压按照恒定速率逐渐升至常压或微正压。从上述单晶生长过程中气压变化的几个阶段可以看出,真空压力控制装置要达到以下主要技术指标,而这些也基本都是进口产品已经达到的技术指标。(1)漏率:小于1×10-7Pa.m3/s(2)控制精度和长期稳定性:在任意真空压力下,控制精度优于1%(甚至0.5%),长期稳定性优于1%(甚至0.1%)。(3)响应速度:小于1s。响应速度往往也决定了控制精度和长期稳定性,特别是在温度和流量的共同影响下,真空压力会产生快速波动,较快的响应速度是保证精密控制的关键。(4)连接不同量程真空计:可连接2只不同量程电容真空计以覆盖整个真空压力测量控制范围,并可根据相应真空度进行传感器的自动切换和控制。(5)可编程控制:可编程进行任意压力控制曲线的设置,并可存储多条控制曲线以便不同工艺控制的调用。(6)PID参数:可自整定,并可存储和调用多组PID参数。(7)上位机通讯:与上位机(如PLC和计算机)进行通讯,并具有标准通讯协议。[size=18px][color=#990000]三、高精度真空压力控制解决方案[/color][/size]从上述分析可以得知,不同的碳化硅晶体生长工艺所需的压力是一个从0.2Pa至80kPa的宽泛区间,目前国内外在晶体生长工艺压力过程中普遍都采用下游控制模式,即在真空泵和生长容器之间安装节流阀,通过恒定上游进气流量,通过节流阀调节下游排气流量来实现真空压力控制。对于大于1kPa的高气压区间,这种下游控制模式十分有效可实现压力精密控制,但对于低压区间(0.1Pa~1kPa),下游模式的控制效果极差,必须要采用调节进气流量和恒定下游抽气流量的上游控制模式。上游模式控制方法在碳化硅单晶生长工艺中应用的一个典型案例是专利 CN217231024U“一种碳化硅晶体生长炉的压力串级控制系统”,其中生长阶段的压力范围为100~500Pa,可将压力稳定控制在±0.3Pa。另外,上游控制模式已经广泛应用在真空控制领域,我们在以往的实际应用和验证试验中也都证实过上游模式可实现1kPa以下低气压的精确控制。综上所述,要实现0.2Pa至80kPa全范围内的真空压力精密控制,需要分别采用上游和下游模式。由此,我们提出了可同时实施上游和下游模式的真空压力高精度控制解决方案,这种上下游同时进行控制的真空压力控制系统结构如图2所示。[align=center][color=#990000][img=02.上下游双向真空压力控制系统结构示意图,550,375]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161032552585_1956_3221506_3.png!w690x471.jpg[/img][/color][/align][align=center][color=#990000]图2 上下游双向真空压力控制系统结构示意图[/color][/align]在图2所示的解决方案中,采用了两只电容真空计来覆盖0.2Pa至80kPa的全真空量程,真空计的测量信号传送给PID控制器,由PID控制器分别驱动上游的电动针阀和下游的电动球阀,由此闭环控制回路实现全量程范围内的真空压力精密控制。真空压力的具体控制过程是:(1)当压力控制设定值位于大于1kPa的高气压范围时,PID控制器处于下游控制模式,PID控制器调节上游的电控针阀为恒定开度,并对下游的电控球阀进行PID自动调节,通过快速调整电控球阀的开度变化使生长容器内的压力测量值快速等于设定值。(2)当压力控制设定值位于小于1kPa的低气压范围时,PID控制器处于上游控制模式,PID控制器调节下游的电控球阀为恒定开度,并对上游的电控针阀进行PID自动调节,通过快速调整电控针阀的开度变化使生长容器内的压力测量值快速等于设定值。[size=18px][color=#990000]四、配套装置的国产化替代[/color][/size]本文提出的解决方案,在真空计、电控阀门和PID控制器满足技术指标要求的前提下,可实现高精度的真空压力控制,通过实际应用和考核试验都验证了控制精度可以达到真空计的最高精度,稳定性可以轻松达到设定值的±0.5%,甚至在大部分真空压力量程内稳定性可以达到设定值的±0.1%。在进行0.1Pa~100kPa范围内的真空度控制过程中,目前真空技术应用领域普遍采用是国外产品,比较典型的有INFICON、MKS、VAT和CKD等公司的薄膜电容真空计、上游流量控制阀、下游排气节流阀及其配套的PID阀门控制器。随着国产化技术的发展,除了薄膜电容真空计和高速低漏率电动蝶阀之外,其他真空压力控制系统的主要配套装置已经完全实现了国产化,低漏率和快速响应等关键技术的突破,使整体技术指标与国外产品近似,PID控制器与国外产品相比具有更高的测控精度,并且还具有国外产品暂时无法实现的双向模式控制功能,真空压力控制比国外产品具有更高的控制精度和稳定性。国产化替代的关键配套装置包括高速低漏率真空用电控针阀和电控球阀,以及多功能超高精度通用型PID控制器,如图3所示。[align=center][color=#990000][img=03.真空控制系统国产化替代装置,690,354]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161033165839_1676_3221506_3.png!w690x354.jpg[/img][/color][/align][align=center][color=#990000]图3 国产化的电动针阀、电动球阀和高精度PID控制器[/color][/align]图3所示的国产化配套装置都达到了第2节中的技术指标要求,特别是高精度的工业用PID控制器更是具有优异性能,其中的24位模数转换、16位数模转换和双精度浮点运算的0.01%最小输出百分比是目前国内外工业用PID控制器的顶级指标,可实现压力、温度和流量等工艺参数的超高精度控制。[size=18px][color=#990000]五、总结[/color][/size]针对PVT法单晶生长工艺,本文提出的上下游双向控制解决方案可实现全量程范围内真空压力的快速和高精度控制,此解决方案已在众多真空技术领域内得到了应用,相应配套的电动针型阀和电动球形阀具有国外产品近似的技术指标,工业用超高精度PID控制器更是具有优异的性能。这些配套装置结合各种真空压力传感器和双向控制方法可实现真空压力的高精度控制。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
微机控制压力试验机产品描述:一、技术参数:1、最大试验力? 2、测量范围:80~2000KN(0~2000kN显示)3、力值精度:≤±1%ㄓ庞谝患叮? 4、压力传感器精度:0.1/F.S5、横梁空间: 365mm6、试验空间:310mm7、上下压盘尺寸:220*220mm8、活塞行程:150mm9、过载保护:超满量程的2%,系统自动停机,破形后自动卸载;活塞达到极限位置保护。10、电机功率:2.5KW 11、力控制速度范围:0-1500KN/min12、加荷可以连续长时间保持恒压(电脑自动控制微机控制压力试验机)13、具有手动、自动两套加荷系统,转换方便。14、全程无分档,自动调零,标定简单。15、油缸下置式。16、油源控制:液压比例阀控制调节速度,换向阀控制方向;油泵最大使用压力约:31.5MPa;油泵流量:10L/min;电机功率:2.5KW17、工作电压:380V/220V18、主机尺寸(长*宽*高):1000*600*1800mm19、油源尺寸(长*宽*高):500*500*1000mm20、随机配备联想电脑、HP A4激光打印机;联想电脑:型号:启天M4400,CPU:ICP D 347,内存:256M ,硬盘:80G,显示器:17”纯平。21、微机控制压力试验机软件验收标准: (1)、位移、力值各传感器可以自动清零。主界面上另设手动清零按钮。 (2)、加载速度、间隔时间等可以根据试验要求设定? (3)、在试验模块内可以根据试块输入面积、领期、试验员、序列号、日期等参数。 (4)、保压模式下:可以任意设定恒定压力值,保持时间任意,电脑自动控制,可以连续多级保压。 (5)、可显示 力-时间曲线,自动换算兆帕值,并可以自动保存到设定表格中,同时将各曲线一并保存到表格中。并能通过打印机打印试验报告。 (6)、试验报告在软件中有编辑器,用户可根据自己要求对试验报告自行编辑、设计、更改。 (7)、比例阀、换向阀实现自动控制,自动调节。 (8)、送油阀、回油阀实现手动控制时使用。
我的液相紫外检测器老是跳掉。有可能压力 不稳,怎么才能控制他!
[size=16px][color=#339999][b]摘要:针对现有技术在印刷或喷绘设备中油墨流量控制不准确,使得油墨粘稠度产生异常造成批量性质量方面的问题,本文提出了相应的串级控制解决方案,即通过双回路形式同时控制油墨的流量和压力。本解决方案不仅可以保证油墨最终流量的控制精度和避免出现质量问题,同时还采用了专门的PID串级控制器,代替传统的PLC控制器且无需再进行编程工作。[/b][/color][/size][align=center][size=16px] [img=高精度级联控制器在印刷和喷绘设备油墨流量控制中的应用,550,300]https://ng1.17img.cn/bbsfiles/images/2023/05/202305161500376435_5330_3221506_3.jpg!w690x377.jpg[/img][/size][/align][b][size=18px][color=#339999]1. 问题的提出[/color][/size][/b][size=16px] 油墨是用于印刷的重要材料,它通过印刷或喷绘将图案、文字呈现在承印物上。油墨中的主要成分和辅助成分主要由连结料(树脂)、颜料、填料、助剂和溶剂等组成,它们均匀地混合并经反复轧制而成一种黏性胶状流体。油墨具有一定的粘稠度,当油墨在管道内输送时,如果流量发生改变或发生其他意外情况,就会导致油墨的粘稠度发生改变,很容易造成批量性的不良品发生。由此可见,油墨流量的精密和稳定控制是印刷和喷绘设备中的核心技术之一。[/size][size=16px] 针对油墨流量精密控制需求,特别是根据客户的要求以及现有技术的不足,希望可以进行技术升级以预防因油路,气路,或者油墨粘度异常造成批量性的问题。为此,为了具体解决油墨流量控制不准确使得油墨粘稠度产生异常造成批量性质量问题,本文提出了相应的解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 解决方案基于流量和压力串级控制原理,即对油墨流量和油墨压力同时进行调整,由此实现高精度的油墨流量控制。解决方案的结构如图1所示。[/size][align=center][size=16px][color=#339999][b][img=01.油墨流量和压力精密控制系统结构示意图,690,312]https://ng1.17img.cn/bbsfiles/images/2023/05/202305161502292249_6607_3221506_3.jpg!w690x312.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 油墨流量串级控制系统结构示意图[/b][/color][/size][/align][size=16px] 如图1所示,解决方案的油墨流量控制系统由压力控制和流量控制两个闭环控制回路构成,这两个控制回路详述如下:[/size][size=16px] (1)压力控制回路:压力控制回路由电气比例阀独立构成,其内部包括压力传感器、调节阀和控制器。压力控制回路的作用是对高压气源压力进行自动减压,并快速恒定控制在压力设定值上。压力控制回路作为串级控制(或双闭环控制)的辅助控制回路(内部闭环回路),主要用来控制加载在油墨桶上的压力,以便快速调节和控制油墨桶的油墨输出流量。[/size][size=16px] (2)流量控制回路:流量控制回路由流量计、串级控制器和压力控制回路构成。在控制过程中,串级控制器检测流量计输出信号并与设定值比较,然后驱动压力控制回路使油墨输出流量稳定在设定流量值上。流量控制回路作为串级控制(或双闭环控制)的主控制回路(外部闭环回路),主要用来检测油墨桶的输出流量并给压力控制回路输出控制设定值。[/size][size=16px] 通过上述两个控制回路的串联最终构成串级控制(级联控制或双闭环)回路,即流量控制回路的输出作为压力控制回路的输入,压力控制回路作为最终流量控制回路的执行机构。[/size][size=16px] 另外需要说明的是,图1只是给出了双闭环控制回路的结构示意图,在具体实施过程中还需根据流量控制精度、耐压范围和油墨喷嘴孔径等工艺参数进行相应的配套器件选择,在此方案中使用了超高精度的PID串级控制器,具有24位AD、16位DA和0.01%最小输出百分比,这样基本就可以满足绝大多数油墨流量控制精度的要求。[/size][size=16px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 本文所述的串级控制系统,通过PID串级控制器、电气比例阀、压力传感器和高精密流量计等元件,通过流量控制和压力控制的双闭环控制形式,实现了设定流量和实际流量自动精密控制。由此可预防因油路、气路或者油墨粘度异常造成批量性的不良发生。[/size][size=16px] 本解决方案的特色之一是采用专门的PID串级控制器来代替一般控制中所用的PLC控制装置,通过串级控制器的配套软件可方便进行流量控制,无需再对PLC控制装置进行编程的繁复操作。[/size][align=center][b][color=#339999][/color][/b][/align][align=center][size=16px][color=#339999][b]~~~~~~~~~~~~~~~~[/b][/color][/size][/align]

[size=16px][color=#339999][b]摘要:真空压力热成型技术作为一种精密成型工艺在诸如隐形牙套等制作领域得到越来越多的重视,其主要特点是要求采用高精度的正负压力控制手段来抵消重力对软化膜变形的影响以及精密控制成型膜厚度。本文提出了相应的改进解决方案,通过可编程的纯正压控制技术实现软化膜上下压差以及热成型压力的精密调节,在保证产品质量的同时可简化控制系统。[/b][/color][/size][align=center][size=16px] [img=精密热成型工艺中的正负压力控制解决方案,550,292]https://ng1.17img.cn/bbsfiles/images/2023/05/202305190914248981_6279_3221506_3.jpg!w690x367.jpg[/img][/size][/align][b][size=18px][color=#339999]1. 问题的提出[/color][/size][/b][size=16px] 热成型是一种将热塑性片材加工成各种制品的较特殊的加工方法。在具体成型过程中,片材夹在框架上加热到软化状态,在外力作用下,使其紧贴模具的型面,以取得与型面相仿的形状。冷却定型后,经修整即成制品。热成型方法有多种,但基本都是以真空和压力这两种方法为基础加以组合或改进而成。典型的真空和压力热成型原理如图1所示。[/size][align=center][size=16px][color=#339999][b][img=01.真空和压力热成型示意图,550,275]https://ng1.17img.cn/bbsfiles/images/2023/05/202305190917007981_2026_3221506_3.jpg!w690x345.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 真空和压力热成型原理示意图[/b][/color][/size][/align][size=16px] 如图1所示,真空成型最大的成型压力为一个大气压,这造成真空成型压力较低,这往往使得受热软化后的热塑材料很难在模具的拐角或坑洼处形成紧密贴合,如图2所示,这会造成整体的成型精度较差。因此,真空成型工艺一般用于对成型精度要求较低的通用性塑料件的生产。[/size][align=center][size=16px][color=#339999][b][img=02.真空热成型过程中的非紧密贴合现象示意图,550,198]https://ng1.17img.cn/bbsfiles/images/2023/05/202305190917280643_6456_3221506_3.jpg!w690x249.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 真空热成型过程中的非紧密贴合现象示意图[/b][/color][/size][/align][size=16px] 正压热成型在真空(负压)基础上的发展演变而来,正压成型的压力往往可以达到4~5个大气压甚至更高,在压缩空气的正压作用下,贴合度大幅提高,产品外观质量和生产效率有了明显的提高,所以正压形式正逐步在高精度热成型工艺中得到广泛应用,特别是对于成型精密度有很高要求的隐形牙齿矫治器(隐形牙套、透明牙套),正压热成型已经成为一种标准工艺。采用正压热成型机器在3D打印模型上制造隐形牙齿矫正器,可以获得更均匀的塑料层,但产生均匀塑料层的理想正压水平需要根据以下几方面的影响因素进行确定和精密控制:[/size][size=16px] (1)牙模的结构比较复杂,表面沟壑较多,采用正压吸塑热成型工艺很难很好的控制牙套的厚度,要求正压压力控制精度极高。[/size][size=16px] (2)受热的热塑性材料呈软化状态,很容易受到重力影响而造成额外的形变,因此在正压热成型中受热软化片材的变形程度相差极大,必须消除重力带来的变形。[/size][size=16px] 为了解决上述问题,西安博恩生物科技有限公司在其发明专利CN112823761B中提出了正负压热成型工艺,首先控制平衡软化片材上下两侧的压强差,抵消重力带来的变形,然后在热成型时再通过压力变化来精确控制膜片的厚度。此发明专利仅提出了一种真空压力热成型工艺的新概念,并未给出压差和压力精密控制的具体实施方法描述,而具体真空压力控制的具体方式则是实现隐形牙套高精度热成型的关键技术之一。为此,本文针对诸如隐形牙齿矫正器正负压热成型工艺中的真空压力精密控制,提出相应的解决方案,以保证新型正负压热成型工艺的顺利实施。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 在专利CN112823761B中提出的正负压热成型过程如图3所示,固定有膜片的可上下移动的夹持器热成型设备分为上下两个独立的密闭腔室,每个独立腔室的真空和压力需要精密控制,只是真空压力的控制范围不同。[/size][align=center][size=16px][color=#339999][b][img=03.正负压加热成型过程示意图,385,113]https://ng1.17img.cn/bbsfiles/images/2023/05/202305190917482920_2081_3221506_3.jpg!w385x113.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图3 正负压加热成型过程示意图[/b][/color][/size][/align][size=16px] 在膜片被加热软化和随夹持器向下移动时,底部腔室相对于顶部腔室为正压,即顶部腔室内的压力要大于顶部腔室压力,底部腔室正压托起软化过程中的膜片以抵消重力的影响。[/size][size=16px] 当膜片贴附在牙模上后,撤掉底部腔室压力,并逐渐增大顶部腔室压力,使顶部腔室压力相对于底部腔室压力为正压,由此通过较大的正压压力使膜片与牙模紧密贴合。[/size][size=16px] 通过上述过程可以看出,正负压热成型中的压力控制具有以下两个重要特征:[/size][size=16px] (1)在压差控制阶段,底部腔室压力要始终大于顶部腔室,以托起软化中的膜片减少重力对膜片变形的影响。这种情况下,两个腔室压力都可以是正压,顶部腔室压力不一定非要是真空负压,顶部腔室也可以是正压,但只要底部腔室压力足够大并能形成相应的压差托起膜片极可。[/size][size=16px] (2)在加压贴附阶段,使顶部腔室的压力足够大就可实现软化膜片的紧密贴合,这也意味着底部腔室的压力也不一定非要是真空负压,只要是顶部腔室的压力足够大,底部腔室为常压时也完全能够实现高压贴合。[/size][size=16px] 由此两个特征可以得出结论:所谓的正负压热成型,完全可以只采用正压控制予以实现,但前提是能够精密和可程序控制上下两个腔室的正压压力。[/size][size=16px] 通过上述分析可知,对上下两个腔室进行正压精密控制,通过压差和高压可很好的实现膜片紧密贴合和保证厚度的均匀性,这样可以减少真空控制的环节和相应装置,简化了控制系统。[/size][size=16px] 依此,本文提出的解决方案就是两个腔室的精密正压压力控制解决方案,通过两套压力控制装置分别实现上下两个腔室的压力可编程控制,具体结构如图4所示。[/size][align=center][b][size=16px][color=#339999][img=04.隐形牙齿矫治器热成型精密压力程序控制系统结构示意图,690,321]https://ng1.17img.cn/bbsfiles/images/2023/05/202305190918023454_1832_3221506_3.jpg!w690x321.jpg[/img][/color][/size][/b][/align][align=center][b][size=16px][color=#339999]图4 隐形牙齿矫治器热成型精密压力程序控制系统结构示意图[/color][/size][/b][/align][size=16px] 在膜片被加热软化和随夹持器向下移动时,底部腔室相对于顶部腔室为正压,即顶部腔室内的压力要大于顶部腔室压力,底部腔室正压托起软化过程中的膜片以抵消重力的影响。[/size][size=16px] 当膜片贴附在牙模上后,撤掉底部腔室压力,并逐渐增大顶部腔室压力,使顶部腔室压力相对于底部腔室压力为正压,由此通过较大的正压压力使膜片与牙模紧密贴合。[/size][size=16px] 通过上述过程可以看出,正负压热成型中的压力控制具有以下两个重要特征:[/size][size=16px] (1)在压差控制阶段,底部腔室压力要始终大于顶部腔室,以托起软化中的膜片减少重力对膜片变形的影响。这种情况下,两个腔室压力都可以是正压,顶部腔室压力不一定非要是真空负压,顶部腔室也可以是正压,但只要底部腔室压力足够大并能形成相应的压差托起膜片极可。[/size][size=16px] (2)在加压贴附阶段,使顶部腔室的压力足够大就可实现软化膜片的紧密贴合,这也意味着底部腔室的压力也不一定非要是真空负压,只要是顶部腔室的压力足够大,底部腔室为常压时也完全能够实现高压贴合。[/size][size=16px] 由此两个特征可以得出结论:所谓的正负压热成型,完全可以只采用正压控制予以实现,但前提是能够精密和可程序控制上下两个腔室的正压压力。[/size][size=16px] 通过上述分析可知,对上下两个腔室进行正压精密控制,通过压差和高压可很好的实现膜片紧密贴合和保证厚度的均匀性,这样可以减少真空控制的环节和相应装置,简化了控制系统。[/size][size=16px] 依此,本文提出的解决方案就是两个腔室的精密正压压力控制解决方案,通过两套压力控制装置分别实现上下两个腔室的压力可编程控制,具体结构如图4所示。[/size][size=16px] 如图4所示,两套压力控制装置配置完全相同,都是由压力传感器、压力调节阀和真空压力控制器构成,两套装置公用一套高压气源。为了保证高精度压力的程序控制,具体配置如下:[/size][size=16px] (1)压力传感器采用超高精度压力计,压力测量范围为0~0.8MPa(表压),精度为满量程的0.05%。压力调节阀采用数控电子减压阀,外部模拟控制信号0~10V对应的压力调节范围为表压0~0.8MPa,综合精度为满量程的0.2%。[/size][size=16px] (2)压力控制器采用超高精度可编程PID调节器,具有24位AD、16位DA和0.01最小输出百分比,具有PID参数自整定功能,并可设计20条程序曲线进行调用和控制,具有标准MODBUS协议的RS485通讯接口。压力控制器自带计算机软件,通过软件可在计算机上直接对控制器进行设置、运行、过程参数显示和存储。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,本文对相关的正负压热成型工艺进行了分析,特别是针对隐形牙齿矫正器这类高精度热成型制作工艺,本文提出了改进的解决方案,即不采用正负压控制方式,而是采用纯正压控制方式。在具体热成型过程中,通过对上下腔室的压力进行不同的程序控制形成可控压差来抵消重力对受热膜片变形的影响,然后再对上腔室进行高压控制,由此可实现高精度的热成型厚度控制,可大幅提高热成型产品的质量和一致性。[/size][size=16px] 新的解决方案可通过两路压力的精确控制,同样可实现正负压热成型过程中的压力成型功能和精密制作能力,但避开了正压和负压同时控制所造成的装置的复杂性和较高成本,这使得新的解决方案更具有实用性。[/size][align=center][b][color=#339999][/color][/b][/align][align=center][size=16px][color=#339999][b]~~~~~~~~~~~~~~~~[/b][/color][/size][/align]

[color=#990000]摘要:目前真空冷冻干燥过程中已普遍使用了电容压力计,使得与电容压力计相配套的压力控制器和电动进气调节阀这两个影响压力控制精度和重复性的主要环节显着尤为突出。为解决控制精度问题,本文介绍了国产最新型的2通道24位高精度PID压力控制器和步进电机驱动电动针阀的功能、技术指标及其应用。经试验验证,上游控制模式中使用电动针阀和高精度控制器可将压力精确控制在±1%以内,并且此控制器还可以同时用于冷冻干燥过程中皮拉尼真空计的监控,以进行初次冻干终点的自动判断。[/color][size=18px][color=#990000]一、问题的提出[/color][/size] 压力控制是真空冻干过程中的一个重要工艺过程,其控制精度严重影响产品质量,对于一些敏感产品的冷冻干燥尤为重要。因此,为使冷冻干燥过程可靠且可重复地进行,必须在干燥室内准确、重复地测量和控制压力,这是考察冷冻干燥硬件设备能力的重要指标之一。同时因为一次干燥时的压力或真空度,直接影响产品升华界面温度,因此准确平稳的控制压力,对于一次干燥过程至关重要。但在实际真空冷冻干燥过程中,在准确压力控制方面目前国内还存在以下问题: (1)压力控制器不匹配问题:尽管冷冻干燥工艺和设备都配备了精度较高的电容压力计,其精度可达到满量程的0.2%~0.5%,但目前国内大多配套采用PLC进行电容压力计直流电压信号的测量和控制,PLC的A/D和D/A转换精度明显不够,严重影响压力测量和控制精度。A/D和D/A转换精度至少要达到16位才能满足冷冻干燥过程的需要。 (2)进气控制阀不匹配问题:对于冷冻干燥中的真空压力控制,其压力恒定基本都在几帕量级,因此一般都采用上游进气控制模式,即在真空泵抽速一定的情况下,通过电动调节阀增加进气流量以降低压力,减少进气流量以增加压力。但目前国内普遍还在使用磁滞很大的电磁阀来进行调节,严重影响压力控制精度和重复性,而目前国际上很多已经开始使用步进电机驱动的低磁滞电动调节阀。 为解决上述冷冻干燥过程中压力控制存在的问题,本文将介绍国产最新型的2通道24位高精度PID压力控制器、电动针阀的功能、技术指标及其应用。经试验考核和具体应用的验证,上游控制模式中使用电动针阀和高精度PID压力控制器可将压力精确控制在±1%以内,并且2通道PID控制器还可以同时用于冷冻干燥过程中皮拉尼真空计的监控和记录。[size=18px][color=#990000]二、国产2通道24位高精度PID压力控制器[/color][/size] 为充分利用电容压力计的测量精度,控制器的数据采集和控制至少需要16位以上的模数和数模转化器。目前我们已经开发出VPC-2021系列高精度24位通用性PID控制器,如图1所示。此系列PID控制器功能强大远超国外产品,但价格只有国外产品的八分之一。[align=center][img=冷冻干燥压力控制,550,286]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211608584555_3735_3384_3.png!w650x338.jpg[/img][/align][align=center][color=#990000]图1 国产VPC-2021系列温度/压力控制器[/color][/align] 压力控制器其主要性能指标如下: (1)精度:24位A/D,16位D/A。 (2)多通道:独立1通道或2通道。2通道可实现双传感器同时测量及控制。 (3)多种输出参数:47种(热电偶、热电阻、直流电压)输入信号,可实现不同参量的同时测试、显示和控制。 (4)多功能:正向、反向、正反双向控制。 (5)PID程序控制:改进型PID算法,支持PV微分和微分先行控制。可存储20组分组PID,支持20条程序曲线(每条50段)。 (6)通讯:两线制RS485,标准MODBUSRTU 通讯协议。 在冷冻干燥的初级冻干终点判断中,VPC-2021系列中的2通道控制器可同时接入电容压力计和皮拉尼压力计,其中电容压力计用作真空压力控制,皮拉尼计用来监视冻干过程中水汽的变化,当两个真空计的差值消失时则认为初级冻干过程结束。整个过程的典型变化曲线如图2所示。[align=center][color=#990000][img=冷冻干燥压力控制,586,392]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211609304857_1459_3384_3.png!w586x392.jpg[/img][/color][/align][align=center][color=#990000]图2. 初级干燥过程中的典型电容压力计和皮拉尼压力计的测量曲线[/color][/align][size=18px][color=#990000]三、国产步进电机驱动电子针阀[/color][/size] 为实现进气阀的高精度调节,我们在针阀基础上采用数控步进电机开发了一系列不同流量的电子针阀,其磁滞远小于电磁阀,如图3所示,价格只有国外产品的三分之一,详细技术指标如图4所示。[align=center][img=冷冻干燥压力控制,400,342]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211609435684_1917_3384_3.png!w599x513.jpg[/img][/align][align=center][color=#990000]图3 国产NCNV系列电子针阀[/color][/align][align=center][color=#990000][img=冷冻干燥压力控制,690,452]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610002292_1250_3384_3.png!w690x452.jpg[/img][/color][/align][align=center][color=#990000]图4 国产NCNV系列电子针阀技术指标[/color][/align][size=18px][color=#990000]四、国产PID控制器和电子针阀考核试验[/color][/size] 考核试验采用了1Torr量程的电容压力计,电子针阀作为进气阀以上游模式进行控制试验。首先开启真空泵后使其全速抽气,然后在68Pa左右对PID控制器进行 PID参数自整定。自整定完成后,分别对12、27、40、53、67、80、93和 107Pa 共 8 个设定点进行了控制,整个控制过程中真空度的变化如图 5所示。 [align=center][color=#990000][img=冷冻干燥压力控制,690,418]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610175473_9598_3384_3.png!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图5 多点压力控制考核试验曲线[/color][/align] 将图5曲线的控制效果以波动率来表达,则得到如图6所示的不同真空压力下的波动率。从图6可以看出,整个压力范围内只有在12Pa控制时波动率大于1%,显然将68Pa下自整定得到的PID参数应用于12Pa压力控制并不太合适,还需要进行单独的PID 参数自整定。[align=center][color=#990000][img=冷冻干燥压力控制,690,388]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610294377_3818_3384_3.png!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图6. 多点压力恒定控制波动率[/color][/align][align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
大家都来说下各自用的设备流量大小和EPC控制压力?谢谢!1、柱头压控制2、进样六通阀吹洗阀套流量控制3、尾吹气流量控制4、分流口流量控制流量分别是多少?EPC控制压力是多少?
如题,使用手套箱时,手套箱手套的手指被剪破了,由于在手指上破了,用补轮胎的不好补,不知用什么方法补好?手套材质是丁基橡胶手套。
[color=#000000][/color][color=#000000]手套箱的概念、用途、种类、特点是什么? [/color][color=#000000]手套箱通常是指一种应用于工业上进行科研、生产的,提供无水无氧环境的设备,这种设备通常带有一个全密闭的腔体,腔体内一般填充氮气、氩气、氦气等惰性气体,腔体的一面或多面安装有视窗和特制手套,通常带过渡舱,把腔体内外的环境完全隔绝开,可以隔绝空气进入腔体内,避免腔体内气氛污染。操作人员可以通过手套对腔体内的物料进行操作。由于手套和密封材料的水氧渗透性和操作物料本身含有的水分和氧气会少量进入手套箱内,要维持箱内环境极低的水氧含量,我们通常需要有极强吸附水氧的材料和气体净化设备去不断吸附箱体内的水氧分子。为了知道手套箱内气氛的水氧含量高低,通常还需要精准的微量水氧探头检测手套箱内气氛环境。[/color][color=#000000]手套箱有多种用途:[/color][color=#000000]1)当对有毒有害物料进行操作时,手套箱可以保护操作人员和环境;[/color][color=#000000]2)当大气环境的 物质如细菌和粉尘会污染物料时,手套箱可以用于隔离箱体外部的物质,保护箱体内的材料免遭污染;[/color][color=#000000]3)当空气中的水分、氧气、氮气等气体能与某种物料产生化学反应,影响物料性能时,手套箱里可以填充某种惰性气体(氮气、氦气、氩气等),手套箱就能隔离箱体外部的空气,保护箱体内的物料被空气中的水分、氧气、甚至氮气的污染和破坏。惰性气体保护手套箱分类:[/color][color=#000000]通常分三种: 1)[url=http://www.dhmstx.com/]真空手套箱[/url]:在操作前,对整个箱体抽真空,把箱体内空气完全抽掉,然后充上高纯气体即可使用。优点:设备便宜。缺点:水氧杂质含量高,通常在100PPM以上。 2)惰性气体吹扫型手套箱:对手套箱进行连续通氮气,不间断地把泄漏入手套箱内的气体杂质清洗出手套箱。优点:设备便宜。缺点:运作成本高,需要消耗大量的惰性气体。水氧杂质含量通常在10PPM以上。 3)惰性气体循环净化型手套箱:手套箱带有气体净化器,手套箱内的较高纯度惰性气体不间断地循环通过气体净化器把惰性气体中的微量水氧分子和有机溶剂等杂质吸附在净化材料中,最终是箱体内气氛维持在高纯惰性气体氛围,起到保护手套箱内物料作用。优点:运作成本低,水氧含量低,通常小于1PPM;含PLC和触摸屏,功能多。缺点:设备价格较高。[/color][color=#000000] 第三种惰性气体循环手套箱在科研生产中使用的最多,应用最广泛,使用效果最好[/color][color=#000000][/color][color=#000000]联系电话:18613800921 朱先生 Lab2000手套箱是由伊特克斯惰性气体系统(北京)有限公司http://www.etelux.com设计生产的标准手套箱,伊特克斯还设计生产其他多种型号的真空手套箱,可根据客户需求定制手套箱系统。[/color][color=#000000][/color][color=#000000][/color]
GBT 25915.7-2010 洁净室及相关受控环境 第7部分:隔离装置(洁净风罩、手套箱、隔离器、微环境)

[color=#ff0000]摘要:针对目前气腹机的气压和流量调节控制精度较差的问题,本文提出了精度更高的气压和流量控制方法,并详细介绍了控制方法的详细内容和关键部件步进电机驱动比例阀的详细技术指标。通过这种新型的技术手段结合PID控制器可将压力和流量控制精度提高到±2%以内,且能进行任意点设定控制和全程自动运行。[/color][align=center][/align][align=center][color=#ff0000]~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/align][align=center][/align][size=18px][color=#ff0000]一、问题的提出[/color][/size]气腹机是内窥镜腹腔手术时的必备设备,其作用是建立人工气腹,向腹腔内充入一定压力的二氧化碳使腹壁与脏器分开,并保持腹腔内的压力为手术提供足够的操作空间,且可以避免穿剌套管刺人腹腔时损伤脏器。在手术期间,需要根据不同的手术部位、腔体大小、病人体质、成人儿童等情况对二氧化碳的充入量或腹腔压力进行精确和精细化控制。目前市场上各种气腹机的气压和流量调节控制技术指标为:(1)气压调节范围:0~4kPa(30mmHg)。(2)气压控制精度:±15%。(3)流量调节范围:0~30L/min。(4)流量调节精度:±20%。从上述技术指标可以看出,目前气腹机的气压和流量调节精度较差,二氧化碳的排放量也较高。本文将针对气腹机存在的测控精度差的问题,提出精度更高的气压和流量控制方法,并详细介绍了控制方法的详细内容和关键部件步进电机驱动比例阀的详细技术指标。通过这种新型的技术手段可将压力和流量控制精度提高到±2%以内,且能最大限度减少二氧化碳排放量和全程自动运行。[size=18px][color=#ff0000]二、当前气腹机压力和流量控制方法及其改进[/color][/size]目前气腹机的压力和流量调节控制原理基本都基于动态平衡的流量调节法,如图1所示,即在腹腔上插入两根气腹针用作进气和出气通道,通过调节阀改变进气和出气流量使得气体在腹腔内达到一种动态平衡。[align=center][img=气腹机压力控制,500,76]https://ng1.17img.cn/bbsfiles/images/2022/06/202206291707134807_247_3384_3.png!w690x106.jpg[/img][/align][align=center]图1 气腹机压力和流量调节控制原理[/align]由于气腹机的充气压力是略大于一个标准大气压的正压,因此在气腹机控压过程中,只需进气保持固定的微小流量而单独调节出气流量就可将压力精确控制到设定值。如果在按照设定值进行压力控制的同时还需按照要求控制出气流量,则需同时对进气和出气流量进行调节,这在不采用PID控制时很难实现,这也是很多目前气腹机控制精度差的主要原因,因此要保证气腹机压力和流量的控制精度和稳定性,最好能采用PID控制方法对进气和出气流量进行调节。另外,气腹机的控制精度受PID控制算法的影响之外,还会受到进气和出气调节阀的精度和压力传感器测量精度的严重影响。目前压力传感器可以做到很高精度和很小体积的芯片形式,这不在本文讨论范围之内,以下主要讨论调节阀的改进以提高气腹机控制精度。从图1可以看出,在进气和排气端分别配置一个调节阀。目前的调节阀主要有两种形式,一种是开关阀,即通过使阀门高频率的开启和关闭来进行流量调节;另一种是开度阀,即通过改变阀门的开度大小来渐变型的进行流量调节。通过在进气和出气端分别配置高频开关阀确实也能实现腹腔压力精密控制的效果,但无法对出气流量进行准确控制。因此,本文提出的改进方法是采用步进电机驱动的开度阀同时实现压力和流量的精密控制,整个控制装置的结构如图2所示。[align=center][img=气腹机压力控制,600,314]https://ng1.17img.cn/bbsfiles/images/2022/06/202206291707359411_2708_3384_3.png!w690x362.jpg[/img][/align][align=center]图2 改进后的气腹机压力和流量控制装置结构示意图[/align]从图2可以看出,在进行压力控制的情况下,可以固定进气比例阀的开度,PID控制器会根据压力设定值和压力传感器测量值自动调节出气比例阀,使得腹腔压力快速达到设定压力并恒定,同时也会根据腹腔的漏气情况自动调节出气比例阀使得腹腔压力始终保持稳定。在压力和流量同时需要控制的情况下,可以固定出气比例阀的开度(此开度大小根据设定压力和流量计算得到),PID控制器会根据压力设定值和压力传感器测量值自动调节进气比例阀,使得腹腔压力快速达到设定压力并恒定,在压力稳定后相应的出气流量也达到稳定。从上述改进方案可以看出,要实现进气和出气比例阀的同时控制,配置了双通道PID控制器,每一通道都具有正反向控制功能,由此可实现任意设定点的压力和流量自动控制。此改进方案的核心部件是步进电机驱动的小流量比例阀,型号为NCNV-20,其阀芯节流内径为0.9mm、响应时间(全关到全开)为0.8s、耐压为7bar、最大流量为50L/min、流量分辨率为0.1L/min、线性度为±2%、步进电机位移分辨率(单步长)为12.7um、控制信号为模拟信号0~10VDC和工作电源电压24VDC(小于12W)。[size=18px][color=#ff0000]三、总结[/color][/size]本文提出的气腹机压力和流量精密控制改进方案采用了标准的动态平衡控制方法,通过采用进气和出气流量的自动调节、双通道PID控制器和步进电机驱动的小流量比例阀,可同时实现对气腹机压力和流量的精密控制,控制精度可达到±2%以内,且不受腹腔漏气等因素影响。[align=center]~~~~~~~~~~~~~~~~~~~[/align]
[color=#990000]摘要:针对高压电气比例阀压力控制精度较差的问题,特别是为了满足客户在超长管件注塑过程中提出的±1%压力控制稳定性要求,本文介绍了相应的解决方案,解决方案的核心技术是采用串级PID控制方法。方案一是基于现有精度较差的高压电气比例阀,通过外置高精度的压力传感器和压力调节器来提高压力控制稳定性;方案二是采用高精度的低压电气比例阀驱动背压阀来实现高压压力精密控制;方案三是在方案二基础上增加外置高精度的压力传感器和压力调节器来进一步提高压力控制稳定性。[/color][align=center][color=#990000]~~~~~~~~~~~~~~~~~~~~[/color][/align][size=18px][color=#990000][b]一、背景介绍[/b][/color][/size]作为一种先进的注塑成型方法,气体压力控制技术被逐步应用于塑料制品的成型,以解决常规注塑产品存在的尺寸精度差、表面凹痕及翘曲变形等缺陷,从而提高产品质量。在以往注塑成型工艺的气体压力控制中,普遍采用高压电气比例阀,但存在压力恒定控制稳定性较差的问题。最近有客户针对细管注塑成型提出了高精度气体压力控制要求,具体如下:(1)气体压力控制范围:1~3MPa。(2)控制方式:在任意设定压力点处进行长时间恒压控制。(3)长期压力稳定性:优于±1%。针对高压电气比例阀压力控制精度较差的问题,特别是为了满足客户在超长管件注塑过程中提出的±1%压力控制稳定性要求,本文将详细介绍相应的解决方案。[size=18px][color=#990000][b]二、高压压力精密控制解决方案[/b][/color][/size][size=18px][color=#990000]2.1 外置压力传感器和调节器的串级控制法[/color][/size]目前注塑工艺中所采用的高压电气比例阀为SMC ITVX2030,压力控制范围为0.01~3MPa,能够满足指标要求,但控制精度较差,为±3%FC。为了提高压力控制精度,方案之一是采用串级控制法,即通过外置高精度的压力传感器和压力控制器构成主控回路,由高压比例阀构成辅助回路。由此,通过这种两个串级PID控制回路,充分利用串级控制法具有高精度的特点,来实现高压压力的高精度稳定控制。此方案的结构布局如图1所示。[align=center][img=外置压力传感器和调节器的串级控制法示意图,500,308]https://ng1.17img.cn/bbsfiles/images/2022/09/202209282250456396_1585_3221506_3.png!w690x426.jpg[/img][/align][align=center]图1 外置压力传感器和调节器的串级控制法示意图[/align][size=18px][color=#990000]2.2 低压电气比例阀驱动高压背压阀[/color][/size]高压压力控制常用的另外一种控制方式是压力放大技术,即采用工作压力较低但精度较高的电气比例阀作为先导阀,驱动一个可工作在高压条件下的背压阀(或气动减压阀),其整体结构如图2所示。[align=center][img=低压电气比例阀驱动高压背压阀示意图,550,202]https://ng1.17img.cn/bbsfiles/images/2022/09/202209282248571168_9189_3221506_3.png!w690x254.jpg[/img][/align][align=center]图2 低压电气比例阀驱动高压背压阀示意图[/align]这里的背压阀相当于一个线性压力放大器,其放大倍数则是实际工艺压力除以比例阀工作压力。由此,可通过调节电气比例阀的驱动压力来控制背压阀的压力输出。如图2所示,这种背压阀高压压力控制方法是一种典型的开环控制,尽管背压阀是对比例阀的输出压力进行线性放大,但其线性度一般较差,这主要是受电气比例阀和背压阀的自身线性度影响。因此,为了实现高精度的压力控制,还需对此方案进行改进以形成闭环控制回路。[size=18px][color=#990000]2.3 高压背压阀串级控制法[/color][/size]为了解决上述比例阀作为先导阀驱动背压阀进行高压压力控制过程中存在的线性度和控制精度较差的问题,可以引入串级控制法,即在图2所示的控制系统中接入一个较高精度的压力传感器和PID控制器,如图3所示,由此对高压管件的压力控制形成一个闭环控制。[align=center][img=高压背压阀串级控制系统结构示意图,600,306]https://ng1.17img.cn/bbsfiles/images/2022/09/202209282249303319_6557_3221506_3.png!w690x353.jpg[/img][/align][align=center]图3 高压背压阀串级控制系统结构示意图[/align]在图3所示的串级控制法高压压力控制装置中,安装了一个外接压力传感器用于直接监测背压阀的输出压力,压力传感器检测到的压力信号传输给外置的PID控制器,外置PID控制器根据设定值或设定程序采用PID算法进行计算后将控制信号传送给电气比例阀,比例阀根据此控制信号再经其内部PID控制器来调节先导压力输出,从而使得背压阀的输出压力快速接近压力设定值并始终保持一致。[size=18px][color=#990000][b]三、总结[/b][/color][/size]从上述的高压压力控制方案中可以看出,所采用的串级控制是一个双控制回路,具有两个独立的PID控制回路。串级控制法(也称级联控制法)是一种有效提升控制精度的传统方法,但在具体实施过程中,需要满足的条件是:主控回路的压力传感器和PID控制器(这里是外置压力传感器和PID控制器)精度一般要比辅助回路的传感器(这里是电气比例阀内置的压力传感器和PID控制器)要高。因此,为了实现±1%以上精度的高压压力控制,我们推荐的配套方案是采用0.1%精度的外置压力传感器和超高精度PID控制器(技术指标为24位ADC、16位DAC和双浮点运算的0.01%最小输出百分比)。[align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
现有一台设备,目前使用斜管压力计监控压力变化并手动调节控制旋钮使压力稳定在196Pa±2Pa,整个实验过程持续一小时,占用一个人力,欲改成自动压力控制,不知有没有合适改造方案或压力控制系统推荐?最好是国产的,进口的也行,就是预算不多。请各位专家们不吝赐教,谢谢
[url=https://insevent.instrument.com.cn/t/Mp]gc[/url] 2010可选压力控制和线速度控制,我们常用压力控制,但不知道为什么,请教一下,大家都是怎么做的呢?那种更稳定呢?

[size=16px][color=#339999]摘要:针对食品油炸过程中涉及到的真空、正压和高压三种压力场控制需求,本文提出了相应的解决方案。解决方案基于动态平衡法控制原理,采用真空压力控制器、电动针阀、电动球阀、电气比例阀、背压阀和真空泵的搭配组合,分别实现真空负压控制、正压控制和超高压控制,可有效保证油炸食物品质,更便于油炸参数和新技术的开发。依据解决方案所构成的真空压力控制系统即可单独构成油炸设备的控制单元,也可配套集成到中央控制系统。[/color][/size][align=center][size=16px][img=油炸设备中的真空、正压和高压三种压力场控制的解决方案,500,376]https://ng1.17img.cn/bbsfiles/images/2023/03/202303291411304643_3469_3221506_3.jpg!w690x520.jpg[/img][/size][/align][size=16px][/size][b][size=18px][color=#339999]1. [/color][/size][size=18px][color=#339999]油炸过程中的压力场控制问题[/color][/size][/b][size=16px] 油炸是以油为传热介质的最流行的食品加工方法之一,是一个典型的高温传热传质过程。油炸食品由于美味而广受欢迎,但油炸食品往往对人体健康造成很大影响。为此,现有和今后的油炸技术都在基于物理场(温度场、压力场、电磁场和声场等)的单独或协同应用技术,以减少油炸食品对健康的负担以及提高油炸食品的生产效率和质量。[/size][size=16px] 油炸与其他加热烹饪方法一样,首先要能形成一定的温度场才能使食物致熟,但为了能提供更健康的油炸食物,往往会需要进行相应的压力等其他物理场的控制。尽管现在有很多其他油炸新技术,但健康油炸过程的两个核心指标还是温度和压力,这是因为压力往往会决定温度高低。众所周知,水的沸点与外界压力有关。当施加的压力降低(或增加)时,水的沸点降低(或增加),这就是基于压力场油炸技术和改变油炸温度的基本原理。[/size][size=16px] 随着科技的进不许,真空油炸(减压)或压力油炸(加压)正在取代常压油炸技术,提高油炸产品的效率和质量。另外,高压加工(HPP)作为预处理技术的应用已经显示出在油炸水果和蔬菜中具有巨大的商业利用潜力,具有更快的水分去除率和更少的质量退化。下面将分别介绍油炸技术中的这三种压力场控制方法以及需解决的技术问题。[/size][size=16px][color=#339999][b]1.1 真空油炸(低压或减压)[/b][/color][/size][size=16px] 真空油炸被定义为在低于大气压下进行的深度油炸过程,典型的真空油炸装置如图1所示[1]。由于真空下水的沸点降低,食物中的水分可以在相对较低的温度下除去,这使得真空油炸具有保留热敏性营养物的显著特征。同时,由于低温和真空下的低氧含量,脂肪氧化和美拉德反应也受到显著抑制。此外,真空油炸水果和蔬菜更好地保留了天然颜色,包含更高的亮度、更低的红色和更低的黄色,这可能与更少的非酶褐变反应有关。[/size][align=center][size=16px][color=#339999][b][img=01.典型真空油炸装置示意图,650,355]https://ng1.17img.cn/bbsfiles/images/2023/03/202303291415539393_8671_3221506_3.jpg!w690x377.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 典型真空油炸装置示意图[1][/b][/color][/size][/align][size=16px] 此外,由于在最初的减压步骤中实现了更少的气泡和更均匀的微观表面结构,因此在油炸产品中实现了更好的保存纹理。[/size][size=16px] 真空油炸的另一个优势是油炸后的离心步骤,同时保持负压,这大大有助于减少最终产品的吸油量。在真空条件下,油炸材料的结构保持膨胀和松散的形状,孔隙中的压力随着热传递和水蒸发速率的降低而保持,这抑制了油被临时毛细压力吸收到外壳中。同时,在油炸篮从油中提起后立即进行离心,大部分附着在表面的油被离心力去除,从表面渗透到多孔结构的油最终减少,从而使最终产品具有较少的吸油量。因此,真空油炸的商业应用已经被许多具有低脂肪生产要求的食品工业所采用,特别是水果和蔬菜。[/size][size=16px] 然而,由于相对较低的温度,真空油炸延长了某些产品的油炸时间,因此较长的加工周期和较高的能耗成为其应用的明显障碍。因此近年来,人们尝试了创新的预处理方法和电磁加热技术,以降低油炸时间和能耗并提高真空油炸产品的整体质量属性。[/size][size=16px] 另外,尽管目前真空油炸技术和设备已经比较成熟,但有个关键技术问题则很少涉及,那就是如何准确控制真空度来满足不同食品的油炸需要,使得油炸食品具有更高的品质和重复性。[/size][size=16px][color=#339999][b]1.2 压力油炸[/b][/color][/size][size=16px] 压力油炸是通过食物自然释放的水分在油炸锅内产生足够压力的过程。水的沸点由于油炸锅中的高压(通常高于大气压)而升高,这导致食物中的水分更好地保留。大量研究表明,压力油炸主要应用于肉、鱼和家禽产品,以有效地减少加工时间并生产具有优良质地的油炸产品,在2bar压力下,压力油炸的传热系数几乎是常压油炸的两倍,与常压油炸相比,压力油炸鸡肉的油炸时间减少了近50%。就压力油炸过程中的结构变化而言,由于加剧的水分梯度,促进了外壳表面的形成,并增加了孔隙率,导致油炸产品的脆性质地和多孔外观。据报道,炸鸡的多汁性、嫩度和颜色得到了极大改善,并且与开放式油炸相比,还发现了更脆的外壳。此外,据报道,压力油炸产品的吸油率因水分保留而降低,同时压力油炸鸡肉中的中性脂肪含量减少了10.0%,碳水化合物含量增加了18.9%,而蛋白质含量没有发现显著差异,压力油炸鸡肉中游离脂肪酸和硫代巴比妥酸的含量分别降低了75.6%和26.2%,这意味着油炸鸡肉中的脂肪质量得到了极大改善。[/size][size=16px] 压力油炸在一些即食食品加工情况下有广泛的应用,如餐馆、超市、便利店、熟食店、学校、医院和其他商业餐饮经营。氮气被选择用作油炸锅中的压力产生源,以产生在保湿和质地方面质量更好的油炸产品。然而,由于繁琐的操作过程和较少的油炸食品量,其在工业生产中的应用受到限制,因此当用于大规模生产水平时,有必要探索合适的油炸条件或连续生产方法,以实现更高的加工效率。[/size][size=16px] 同样,在压力油炸中也同样很少涉及如何准确控制压力来满足不同食品的油炸需要。[/size][size=16px][color=#339999][b]1.3 高压加工预处理[/b][/color][/size][size=16px] 高压加工也称为高静水压或高静压(远高于100MPa),是食品加工中的一种新兴技术。这种最初用作非热保存的技术被发现有利于在油炸过程中获得高质量转移率,因为它对部分细胞渗透性的改变有影响。同时,油炸前的高压加工预处理被确定为通过抑制酶促和非酶促反应的发生而对油炸产品的颜色产生积极影响。[/size][size=16px] 值得注意的是,在100MPa较低压力下提交的油炸食品明显轻于200和300MPa较高压力下处理的油炸食品。压力造成的组织破坏增加了多酚氧化酶与其底物的接触,并没有完全使酶失活。有研究报道,高压加工预处理有助于减少油炸时间,增加油炸蔬菜和水果的硬度,这可能与细胞壁的物理损伤有关,导致细胞破裂和随后的水分渗出。此外,高压加工预处理能够保留水果和蔬菜的营养和感官特性,因为它对与其颜色和风味相关的化合物的共价键影响有限,同时能更好地保持最终油炸产品的酚类物质含量和抗氧化能力,而这种效应甚至可以在储存过程中有效维持。然而,据报道,高压加工预处理油炸会使得有些水果和蔬菜的吸油量增加,这可能与较高的渗透率有关,这有助于油炸物容纳更多的油。因此,适当的减油技术可以与高压加工预处理相结合,以保证其作为提高油炸产品效率和质量的有效策略。[/size][size=16px][color=#339999][b]1.4 问题的提出[/b][/color][/size][size=16px] 从上述三种不同压力形式的油炸方法介绍可以看出,压力场的控制会涉及到低压、正压和高压三个压力区间,但很少有报道涉及到详细的压力控制方法和相关仪器,而压力的准确控制会涉及到具体油炸产品品种和相应的油炸温度,为此本文将提出详细的真空压力控制解决方案。[/size][size=18px][color=#339999][b]2. 真空压力控制原理[/b][/color][/size][size=16px] 从上述油炸过程中所需的压力场可以看出,以绝对压力形式来描述,其相应的真空压力范围为0.005 ~ 300MPa。为了在如此宽泛的压力范围内实现压力控制,本文将采用动态平衡控制方法,其基本原理如图2所示。此原理的特点是既能进行全量程范围的真空压力控制,也可以进行某段区间内的单独控制。[/size][align=center][size=16px][color=#339999][b][img=02.油炸装置真空压力控制原理示意图,550,238]https://ng1.17img.cn/bbsfiles/images/2023/03/202303291416216769_231_3221506_3.jpg!w690x299.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 油炸过程真空压力控制原理示意图[/b][/color][/size][/align][size=16px] 按照图2所示的动态平衡法真空压力控制原理,油炸过程中的真空压力控制主要分三部分:[/size][size=16px] (1)负压区间控制:在控制真空负压时,由进气排气阀门、真空泵、传感器和控制器组成闭环控制回路,高压气源提供压力不高的工作气体。在具体控制过程中,真空压力控制器根据传感器采集信号与设定值进行比较,控制器输出两路信号分别用于固定进气阀门开度和调节排气阀门开度,通过自动调节进出气流量达到动态平衡来实现负压区间全量程的真空度准确控制。[/size][size=16px] (2)正压区间控制:在低于7MPa范围内的正压控制时,由高压气源、进气阀、传感器和控制器组成闭环控制回路。进气阀门直接采用电气比例阀,比例阀对高于7MPa的高压气源进行减压控制,而真空压力控制器根据压力传感器与设定值比较后输出信号对比例阀进行自动调节。[/size][size=16px] (3)超高压区间控制:对于7~300MPa范围内的超高压控制,进气阀门需要采用电气比例阀和背压阀的组合形式。背压阀对超高压进气进行减压来控制控制油渣罐内的超高压力,电气比例阀作为先导阀来调节背压阀,真空压力控制器根据压力传感器与设定值比较后输出信号对比例阀进行自动调节。[/size][size=18px][color=#339999][b]3. 解决方案[/b][/color][/size][size=16px] 根据前述的油炸装置真空压力控制原理以及三个不同真空压力范围的控制方法,本文提出了三个相应的具体解决方案。[/size][size=16px][color=#339999][b]3.1 真空负压控制解决方案[/b][/color][/size][size=16px] 基于图1所示的油炸装置结构,真空负压控制的解决方案具体如图3所示。[/size][align=center][size=16px][color=#339999][b][img=03.油炸装置真空负压控制系统结构示意图,550,238]https://ng1.17img.cn/bbsfiles/images/2023/03/202303291416416718_3794_3221506_3.jpg!w690x299.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图3 油炸装置真空负压控制系统结构示意图[/b][/color][/size][/align][size=16px] 方案中采用了电动针阀进行进气流量调节,采用电动球阀进行排列流量调节,真空计为1000Torr量程的薄膜电容规。在油炸装置中对选用的电动针阀和电动球阀有较高的要求,一方面是要有较好的真空密封性能,更重要的是还要具有较快的调节速度,以便能对油炸过程中温度变化以及水分蒸发造成的气压突变进行快速调节。[/size][size=16px] 另外,所用的电动针阀和球阀较适用于小尺寸的油炸罐体,对于较大规格的油炸罐体,可以考虑采用具有相同性能的进气电动球阀和排气电动蝶阀,以满足大尺寸腔体对大流量进气和排气的需要。[/size][size=16px] 解决方案中的另一个重要内容是真空压力控制器,这里的控制器是一个高精度通用型的双通道PID控制器,两个独立通道分别用于电动针阀和电动球阀开度的控制。另外,此真空压力控制器具有通讯接口和配套的计算机软件,可通过上位机编程进行控制,也可能用计算机直接运行软件进行控制操作。[/size][size=16px][color=#339999][b]3.2 正压控制解决方案[/b][/color][/size][size=16px] 同样基于图1所示的油炸装置结构,7MPa以下正压控制的解决方案具体如图4所示。[/size][align=center][size=16px][color=#339999][b][img=04.油炸装置7MPa以下压力控制系统结构示意图,500,246]https://ng1.17img.cn/bbsfiles/images/2023/03/202303291417152373_4414_3221506_3.jpg!w690x340.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图4 油炸装置7MPa以下正压控制系统结构示意图[/b][/color][/size][/align][size=16px] 方案中采用了电气比例阀直接对油炸罐压力进行控制,即对高压气源的压力进行减压后输送到油炸罐。电气比例阀的控制则采用了真空压力控制器,同样,也可以采用上位机和计算机直接对电气比例阀进行控制。[/size][size=16px] 方案中需要注意的是,电气比例阀仅能满足小尺寸油炸罐内的压力控制,针对较大尺寸的油炸罐,则需要在电气比例阀后面增加流量放大器,以对大尺寸罐体内的压力快速响应和控制。[/size][size=16px][color=#339999][b]3.3 超高压控制解决方案[/b][/color][/size][size=16px] 同样基于图1所示的油炸装置结构,超高压控制的解决方案具体如图5所示。[/size][align=center][size=16px][color=#339999][b][img=05.油炸装置超高压300MPa压力控制系统结构示意图,500,317]https://ng1.17img.cn/bbsfiles/images/2023/03/202303291417342442_4888_3221506_3.jpg!w690x438.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图5 油炸装置超高压控制系统结构示意图[/b][/color][/size][/align][size=16px] 图5中的解决方案与图4所示的正压控制解决方案类似,这里的电气比例阀是作为先导阀来驱动背压阀,背压阀则对输入的超高压气源进行减压以实现油炸罐内的超高压控制。[/size][size=16px] 在此方案中需要采用两路气源,一路气源用于驱动电气比例阀,另一路气源作为油炸罐的工作气源。[/size][size=16px] 油炸罐的超高压力自动控制也采用了真空压力控制器,控制器根据压力传感器信号来控制电气比例阀,电气比例阀驱动背压阀,由此实现对背压阀的间接控制。同样,也可以采用上位机和计算机直接对背压阀进行控制操作。[/size][size=18px][color=#339999][b]4. 总结[/b][/color][/size][size=16px] 采用真空压力控制器、电动针阀、电动球阀、电气比例阀、背压阀和真空泵的自动化控制解决方案,可以实现食品油炸过程中的真空压力准确控制,提高油炸食品的质量和口感。[/size][size=16px] 解决方案的另外一个特点是可以采用灵活的组合,实现不同范围的真空压力控制,可满足不同压力场要求的油炸设备,也可满足不同尺寸大小的油炸罐真空压力控制需要。[/size][size=16px] 解决方案具有很强的可扩展性和灵活性,在实现真空压力控制的同时,真空压力控制器还可以拓展应用到油炸过程中的温度和其他参数的控制,控制器的小巧尺寸和通讯功能可方便的集成在油炸装置的控制系统中,也可单独构成中央控制单元。[/size][size=18px][color=#339999][b]5. 参考文献[/b][/color][/size][size=16px][1] Andrees-Bello, A., P. Garc?a-Segovia, and J. Mart?nez-Monzo. 2011. Vacuum frying: An alternative to obtain high-quality dried products. Food Engineering Reviews 3 (2):63–78.[/size][size=16px][/size][align=center]~~~~~~~~~~~~~~~~[/align][size=16px][/size][size=16px][/size][size=16px][/size]

实验室对员工的安全意识越来越高,PPE的投入也越来越多,我们实验室也不列外,使用的手套主要有上面两种,一种是乳胶手套,一种是丁腈手套,熟悉的肯定知道,乳胶手套一般用在使用有机试剂时,当然我们在医院见得最多的也是乳胶手套,但乳胶手套是橡胶制品,部分人员是过敏的,另一种的丁腈手套,主要在使用酸碱时使用。PPE作为保护我们最后一道防线,一定要正确佩戴和取下。操作都是有教程的,一定要正确使用,避免试剂接触到皮肤,否则这手套就取不到保护作用了。大家在戴这手套时,有没发现有股什么味道?这安全吗?[img]https://simg.instrument.com.cn/bbs/images/default/emyc1010.gif[/img][img=,609,699]https://ng1.17img.cn/bbsfiles/images/2019/09/201909290947579485_9302_3299836_3.png!w609x699.jpg[/img][img=,690,329]https://ng1.17img.cn/bbsfiles/images/2019/09/201909290947595037_1825_3299836_3.png!w690x329.jpg[/img] 我也一直在纳闷,[img]https://simg.instrument.com.cn/bbs/images/default/em09511.gif[/img]这个味道是哪里来的呢?我们有什么办法来测定鉴别吗?选取了实验室在用的手套,准备做个测试。 原材料有了,检测方法用什么呢?居然是有味道,易挥发,可以考虑热脱附,吹扫,固相微萃取,由于实验室条件所限,有吹扫捕集,那是测定水中挥发性有机物的,不大适合,但微萃取操作方便,对气味检测灵敏,比较适合。 实验方法:开启一盒手套,将其剪碎,置于收集瓶中,锡箔纸密封,底部稍加热,微萃取器置于瓶中,注意避免接触样品,采集一小时,吸收饱和后,进GC-MS分析其成分。重复萃取,重现性很好,GC-MS总流程图如下:[img=,690,321]https://ng1.17img.cn/bbsfiles/images/2019/09/201909280943247846_6751_1608025_3.jpg!w690x321.jpg[/img]图中第一总离子图为丁腈手套的色谱图,其主要为丁腈制品的一些副产物。下面两个分别是两种乳胶手套的总[url=https://insevent.instrument.com.cn/t/3p][color=#3333ff]离子色谱[/color][/url]。从色谱图分析两种不同品牌的乳胶手套中添加的物质类似。再从MS谱库搜索发现和如下几种物质匹配度很高,丁腈手套和乳胶手套中含有的物质明显差别。乳胶手套中含有的物质检索发现其中含有的主要物质为:N,N-dibutylFormamide,再检索N,N-二丁基甲酰胺的MSDS:[img=,634,549]https://ng1.17img.cn/bbsfiles/images/2019/09/201909280943445056_1086_1608025_3.jpg!w634x549.jpg[/img]CAS Number 000761-65-9Entry Number 28102Molecular Formula C9H19NO接触控制和个人防护控制参数:有临界值的需要在工作场所监控的组分:无要求毒性学信息:急性毒性:吞咽有毒,小鼠腹腔LD50:300mg/kg;大鼠腹腔LD50:390mg/kg与分类相关的LD/LC50值:无数据。参考文献有限,但从物性看是无毒的,后续还做了水溶萃取实验,并和DMF、DMAC做比较,发现乳胶手套中的物质和DMF、DMAC是有很大区别的,虽然都是甲酰胺物质,有些相似,但毒性小很多,应该是安全无毒,这下放心使用了。但是有些人会对乳胶制品有过敏情况,个人应根据自身情况选择或避免接触操作,保护员工和自己安全都有不可推卸的责任。[img]https://simg.instrument.com.cn/bbs/images/default/em09505.gif[/img]
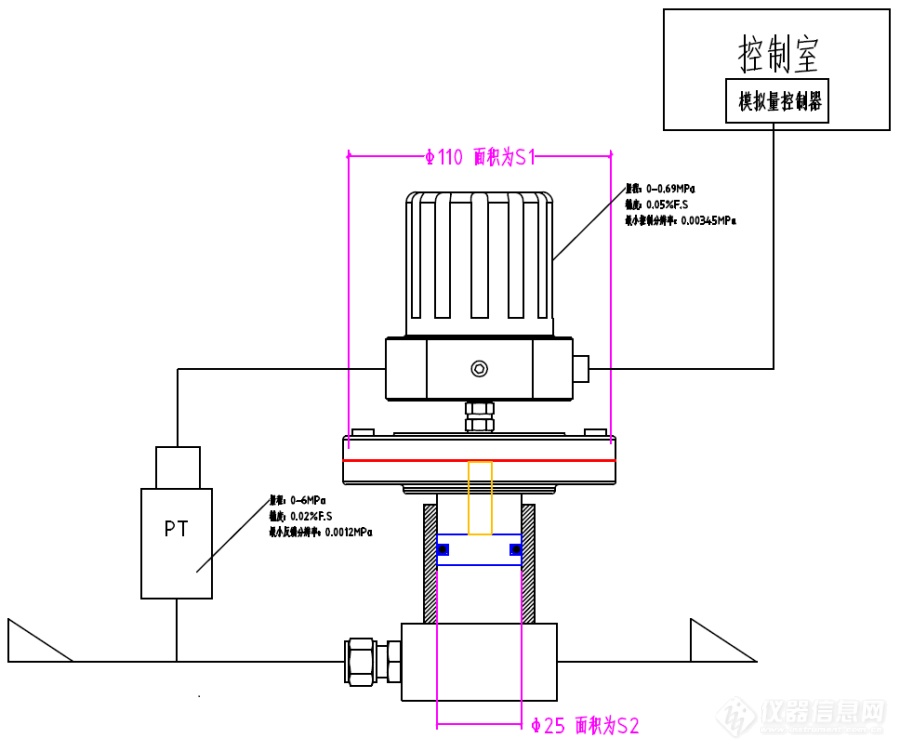
[size=14px][color=#ff0000]摘要:本文针对一个高精度气体压力程序控制工艺案例,分别对TESCOM ER5000及其配套背压阀和国产化产品的技术方案进行了计算分析。分析结果证明非标定制的国产化产品可以实现更高的测控精度,具有更便捷的操作性和更高的性价比。[/color][/size][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#ff0000]一、案例简介[/color][/size][size=14px]在某一压力工艺过程中,工艺设备中配备了一个缓冲罐以保证工艺压力准确和稳定,要求缓冲罐的气体压力可程序控制,技术指标如下:[/size](1)缓冲罐容积:200~300升。[size=14px](2)缓冲罐功能:升压、保压和泄压。最大压力:3~5MPa。[/size](3)压力控制程序:升压3天,保压1周,泄压15天。[size=14px](4)控压精度:±(0.02~0.1)MPa,最好能达到±0.02MPa。[/size]因产品生产工艺对压力控制精度比较敏感,现有压力控制系统无法满足要求,生产工艺需采用更高精度的气体压力控制装置进行升级改造。本文将针对此高精度压力控制技术要求,分别对艾默生和上海依阳的压力控制装置进行了分析和对比,以期实现国产化替代。[size=18px][color=#ff0000]二、TESCOM压力控制装置分析[/color][/size]TESCOM压力控制装置的结构如图1所示,具体包含TESCOM的26-20调压器(最大出口压力5.5MPa)和ER5000Sl-1电子气控执行器。[align=center][size=14px][img=ER5000替代,690,575]https://ng1.17img.cn/bbsfiles/images/2022/05/202205310852254352_3211_3384_3.png!w690x575.jpg[/img][/size][/align][size=14px][/size][align=center]图1 艾默生TESCOM压力控制装置结构示意图[/align][size=14px]因先导感压面积 S1 × 执行器输出压力=高压感压面积 S2 × 高压阀输出压力+部件阻力。[/size]部件阻力(静止到运动的启动阻力)主要来自阀芯开闭合时弹簧下压的变形,部件的滑动摩擦暂且不计。因下游缓冲罐为密闭状态,因此每次压力整定好后,阀芯处于闭合状态。[size=14px]此阀芯(Tescom其他型号的也是同款阀芯)的静启动推力,约为0.5kg。[/size]可得:高压阀自身的步阶精度Δ(MPa)[size=14px]=(先导感压面积S1 × 气动执行器最小分辨压力K - 部件阻力N)/高压感压面积S2[/size]=(S1× K-N)/S2 =(94. 99cm^2 × 0.0345kg/cm^2-0 .5kg)/4.91cm^2[size=14px]=Δ0.056MPa. [/size][size=18px][color=#ff0000]三、依阳公司压力控制装置分析[/color][/size][size=14px]依阳公司压力控制装置的结构如图2所示,具体包含高精度调压器(最大出口压力6MPa)和高精度电子气控执行器。[/size][align=center][size=14px][img=ER5000替代,690,653]https://ng1.17img.cn/bbsfiles/images/2022/05/202205310853043434_7346_3384_3.png!w690x653.jpg[/img][/size][/align][size=14px][/size][align=center]图2 依阳公司压力控制装置结构示意图[/align][size=14px]同样先导感压面积S1×执行器输出压力=高压感压面积 S2 × 高压阀输出压力+部件阻力。[/size]同样部件阻力(静止到运动的启动阻力)主要来自阀芯开闭合时弹簧下压的变形,部件的滑动摩擦暂且不计。因下游缓冲罐为密闭状态,因此每次压力整定好后,阀芯处于闭合状态。可得:高压阀自身的步阶精度Δ(MPa)=(先导感压面积S1 × 气动执行器最小分辨压力K - 部件阻力N)/高压感压面积S2[size=14px]=(S1× K-N)/S2 [/size]=(254.3cm^2 × 0.0615kg/cm^2-0 .6kg)/38.47cm^2[size=14px]=Δ0.039MPa. [/size][size=18px][color=#ff0000]四、结论[/color][/size][size=14px]通过上述计算,对比分析可得出以下结论:[/size](1)气体压力的控制精度,与气动执行器精度和背压调压阀精度密切相关。[size=14px](2)每次做压力调整,因冷启动阻力K值依然存在,也是阀门整体高压输出分辨率的瓶颈根源。最终分辨率的瓶颈,不是传感器和执行器的精度。[/size](3)通过上述计算公式可知加大执行机构的受力面积,可以对抗冷启动的阻力,从而提高每次调整步价的分辨率。阀体定制化服务,可以将执行机构的受力面积无限扩大,从而让输出的压力分辨率趋近无限细分。[size=14px](4)TESCOM或市场上的其他批量化商用阀门,考虑的是满足大多数使用场合的精度,因此更侧重的是体积紧凑和材料的节约,综合其性价比,并不完全适用和满足高精度或者特殊工况的使用。[/size]通过上述分析结论,可以明显看出通过依阳公司定制的气体压力控制装置可以达到比国外产品更高的控制分辨率和控制精度,完全能满足高精度高压控制要求等特殊工况,可实现有效的国产化替代。[size=14px][/size][align=center]=======================================================================[/align] [size=14px][/size]
微机控制压力试验机的选购应从以下几方面停止比拟: 一、起首应思索需求测试资料拉力范畴。拉力范畴的差别,决议了所运用传感器的差别,也就决议了压力机的构造,但此项对价钱的影响不大。关于普通软包装出产厂家,拉力范畴在200牛顿的了就曾经充足。因而也决议了微机控制压力试验机应用单臂式的就能够了。与单臂式绝对应构造的是门式构造,它是顺应比拟大的拉力,如一吨或以上。以是软包装厂家根本用不着。 二、 实验行程的题目。依据软包装薄膜的需求测试的功能和请求,行程在500-600mm就能够。资料伸长率超越1000%的能够选用行程1000或是1200mm。 三、 规范设置装备摆设题目。智能化的三种根本设置装备摆设:主机、微电脑、另有打印机,假如微电脑功用强能够间接打印。别的也可装备平凡电脑。有了电脑,就能够停止庞大的数据剖析,如数据编纂,部分缩小,可调解陈诉方式,停止成组模样形状的统计剖析。如配用电脑,厂家应给装备响应程序节制体系。 四、输入效果。实验效果输入效果可恣意设置:最鼎力值、伸长率,抗拉强度、定力伸长、定伸长力值、屈从强度,弹性模量、最大实验力8项。这能够说是微电脑操纵时,输入的最面面俱到的效果。外洋一些厂家的产物,普通能够输入这8项。大陆有的厂家能够输入5-6项,有的厂家就只能输入最鼎力值,均匀值,最小值三项。 五、在可做实行项目上。 软包装请求微机控制压力试验机一机多用,即在装备差别夹具的根底上,可做拉伸、紧缩、弯曲、扯破、剪切、180度剥离、90度剥离实验。 市道市情上有一些高等压力机除以上项目外,因其传感器精度高还开辟出了能够测试摩擦系数摩擦系数测试仪。 六、产物机器重要设置装备摆设:传动,有丝杠传动和齿条传动,前者昂贵,用于高精度,测试反复性高;后者廉价,用于低精度,测试反复性低。 丝杠,对拉力精度丈量具有决议感化。普通的有滚珠丝杠,梯形丝杠,普通丝杠。此中,滚珠丝杠的准确度最高,然则其功能的发扬要靠电脑伺服体系操纵才干发扬,整套价钱也比拟昂贵。应用普通丝杠和梯形丝杠就能够到达软包装所请求的精度,即0.5-1%精度。 传动,有齿轮传动和链条传动,前者昂贵,用于高精度;后者廉价,用于低精度。 传感器,重要本钱在于寿命,光电感到是此中比拟先辈的技能,普通可用十万次以上,入口和大陆局部合股厂家能够到达。 七、实验速率。 国度规范规则实验速率为200mm/min, 市道市情设置装备摆设有的在10~500 mm/min,有的在0.01~500 mm/min,前者普通运用平凡调速体系,本钱较低,粗拙影响精度;后者运用伺服体系,价钱昂贵,精度高,关于软包装企业,选用伺服体系,调速范畴1~500mm/min的就充足了,如许既不影响精度,价钱又在公道范畴之内。 八、丈量精度。 精度题目,包罗测力精度,速率精度,变形精度,位移精度。这些精度值最高都可到达正负0.5。但关于普通厂家,到达1%精度就充足了。别的,力值辨别率简直都能到达十万分之一。 以上根本设置装备摆设在三万元阁下。 当前市场上用于检测资料拉伸功能的拉力实验机许多,然则并非一切的实验机都合适软包装资料的拉伸实验,本文分离我国资料检测规范,剖析了选择软包材检测的微机控制压力试验机时应特别存眷的目标。 塑料和橡胶的拉伸功能是其力学功能中最紧张、最根本的功能之一,它在很大水平上决议了该种塑料和橡胶的运用场所。拉伸功能的优劣,能够经过拉伸实验来检测。
Cnonline 手套箱性能特点:1.整个箱体是由304不锈钢制作而成,表面喷塑。 2.手套箱是由箱体、过渡仓、照明、移动底架、气体净化和活化系统组成。 3.箱体内配照明灯和多孔插座等实验必备装置。 4.密封装置设计新颖,开启方便。 5.过渡室内两个门解决了对箱体反复抽真空的问题。
Cnonline 手套箱性能特点:1.整个箱体是由304不锈钢制作而成,表面喷塑。 2.手套箱是由箱体、过渡仓、照明、移动底架、气体净化和活化系统组成。 3.箱体内配照明灯和多孔插座等实验必备装置。 4.密封装置设计新颖,开启方便。 5.过渡室内两个门解决了对箱体反复抽真空的问题。

请问,Cnonline 手套箱是什么?好用吗?手套箱是将高纯情性气体充入箱体内,并循环过滤掉环境中的活性物质(水、氧、微生物等)箱体设备。适用范围: 手套箱被广泛应用于医疗卫生、化学化工、材料研究、农业研究等部门,是生物实验、工业实验、气体密封实验、特殊气候实验、光合作用实验首选设备。 性能特点: : 1.整个箱体是由304不锈钢制作而成,表面喷塑。 2.手套箱是由箱体、过渡仓、照明、移动底架、气体净化和活化系统组成。3.箱体内配照明灯和多孔插座等实验必备装置。 4.密封装置设计新颖,开启方便。 5.过渡室内两个门解决了对箱体反复抽真空的问题。技术参数: 一.直径200mm、厚度0.4mm进口丁基合成橡胶手套。 二水、氧1ppm 三泄漏率0.05vo1%/h 四中文界面,人机对话,操作便捷[img=,690,920]https://ng1.17img.cn/bbsfiles/images/2019/05/201905161024521217_5177_3909306_3.jpg!w690x920.jpg[/img]







 我要推广仪器
我要推广仪器
 下载APP
下载APP