推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-612-9980
留言咨询
400-612-9980
留言咨询
 400-801-8191
留言咨询
400-801-8191
留言咨询
 400-860-5168转2555
留言咨询
400-860-5168转2555
留言咨询





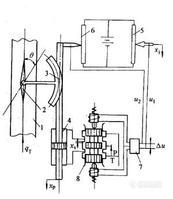
液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。液压伺服系统的工作原理可由图1来说明 液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。 电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。[img]http://ng1.17img.cn/bbsfiles/images/2009/12/200912151106_190054_1634361_3.jpg[/img] 图所示为一个对管道流量进行连续控制的电液伺服系统。在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。阀板转动由液压缸带动齿轮、齿条来实现。这个系统的输入量是电位器5的给定值xi。对应给定值xi,有一定的电压输给放大器7,放大器将电压信号转换为电流信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量xv。阀开口xv使液压油进入液压缸上腔,推动液压缸向下移动。液压缸下腔的油液则经伺服阀流回油箱。液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。同时,液压缸活塞杆也带动电位器6的触点下移xp。当xp所对应的电压与xi所对应的电压相等时,两电压之差为零。这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。 液压传动中具有随动作用的液压自动控制系统。在这种系统中,大功率的液压元件(包括液压伺服阀和液压执行元件) 跟随小功率的指令信号元件动作。执行元件所控制的通常是位置、速度等机械量。指令信号元件又称参考信号元件,它发出代表位置、速度或其他量的指令信号。大功率与小功率之比可以达几百万倍以上。液压伺服系统是反馈控制系统,反馈回来代表实际状态的信号与指令信号比较,得到误差信号,如果误差不是零,便进行调节。例如在高射炮自动瞄准系统中,雷达跟踪飞机,并将信号送给指挥仪,指挥仪计算出高射炮管应处的位置,炮管的实际位置与指挥仪算出的指令位置在系统中不断进行比较和调节,直到误差小于许可值时才射击。液压伺服系统通常应包括:实际状态的测量反馈元件;小功率指令信号的传递元件和大功率液压执行元件;期望状态和反馈状态的比较元件;差值信号的放大元件。液压伺服系统分为机械液压伺服系统、电液伺服系统和气液伺服系统。它们的指令信号分别为机械信号、电信号和气压信号。电液伺服系统因电气控制灵活而得到广泛的应用;气液伺服系统用于防爆的环境或容易获得气压信号的场合。液压伺服系统应具有必要的性能:工作稳定;对指令信号反应快;稳态误差小;对干扰不敏感。液压伺服系统是自动控制系统中应用最广泛的一种。在精密加工的定位系统中,液压伺服系统能保证小于0.1微米的加工误差。世界上许多巨大天文望远镜的动作,都是用星光作为伺服系统的指令信号,通过液压伺服系统和执行元件进行跟踪的。 液压伺服系统的组成 液压伺服系统是由液压动力机构和反馈机构组成的闭环控制系统﹐分为机械液压伺服系统和电气液压伺服系统(简称电液伺服系统)两类。其中﹐机械液压伺服系统应用较早﹐主要用於飞机的舵面控制和机床仿型装置上。随著电液伺服阀的出现﹐电液伺服系统在自动化领域占有重要位置。很多大功率快速响应的位置控制和力控制都应用电液伺服系统﹐如飞机﹑导弹的舵机控制系统﹐船舶的舵机系统﹐雷达﹑大炮的随动系统﹐轧钢机械的液压压下系统﹐机械手控制和各种科学试验装置(飞行模拟转台﹑振动试验台)等。 液压伺服系统的优缺点 液压伺服系统与电气伺服系统相比有三个优点﹕ (1)体积小﹐重量轻﹐惯性小﹐可靠性好﹐输出功率大﹔ (2)快速性好﹔ (3)刚度大(即输出位移受外负载影响小)﹐定位准确。 缺点是加工难度高﹐抗污染能力差﹐维护不易﹐成本较高。
电液伺服疲劳试验机是一种用于测试材料、零部件或结构在长时间循环负载下的疲劳性能的设备。它通过电液伺服系统控制加载和卸载过程,对被测试材料施加循环负载,模拟实际工作条件下的应力变化。电液伺服疲劳试验机通常由加载系统、控制系统、数据采集系统和测试夹具组成。加载系统一般采用液压缸或伺服电机进行加载,能够模拟各种不同的载荷形式和载荷变化速率。控制系统负责对加载系统进行控制,实现预设的加载规律和循环次数。数据采集系统用于实时采集和记录试验过程中的加载、变形和应力数据,以评估试样的疲劳性能。测试夹具用于固定和保持试样的位置和形状,确保试样在试验过程中的可靠加载。电液伺服疲劳试验机广泛应用于材料研究、零部件寿命评估、结构强度验证等领域。它可以帮助工程师了解材料的疲劳寿命、疲劳裂纹扩展行为以及结构的疲劳强度,为产品设计和工程决策提供数据支持。电液伺服疲劳试验机是一种用于测试材料、零部件或结构在长时间循环负载下的疲劳性能的设备。它通过电液伺服系统控制加载和卸载过程,对被测试材料施加循环负载,模拟实际工作条件下的应力变化。电液伺服疲劳试验机通常由加载系统、控制系统、数据采集系统和测试夹具组成。加载系统一般采用液压缸或伺服电机进行加载,能够模拟各种不同的载荷形式和载荷变化速率。控制系统负责对加载系统进行控制,实现预设的加载规律和循环次数。数据采集系统用于实时采集和记录试验过程中的加载、变形和应力数据,以评估试样的疲劳性能。测试夹具用于固定和保持试样的位置和形状,确保试样在试验过程中的可靠加载。电液伺服疲劳试验机广泛应用于材料研究、零部件寿命评估、结构强度验证等领域。它可以帮助工程师了解材料的疲劳寿命、疲劳裂纹扩展行为以及结构的疲劳强度,为产品设计和工程决策提供数据支持。电液伺服疲劳试验机是一种用于测试材料、零部件或结构在长时间循环负载下的疲劳性能的设备。它通过电液伺服系统控制加载和卸载过程,对被测试材料施加循环负载,模拟实际工作条件下的应力变化。电液伺服疲劳试验机通常由加载系统、控制系统、数据采集系统和测试夹具组成。加载系统一般采用液压缸或伺服电机进行加载,能够模拟各种不同的载荷形式和载荷变化速率。控制系统负责对加载系统进行控制,实现预设的加载规律和循环次数。数据采集系统用于实时采集和记录试验过程中的加载、变形和应力数据,以评估试样的疲劳性能。测试夹具用于固定和保持试样的位置和形状,确保试样在试验过程中的可靠加载。电液伺服疲劳试验机广泛应用于材料研究、零部件寿命评估、结构强度验证等领域。它可以帮助工程师了解材料的疲劳寿命、疲劳裂纹扩展行为以及结构的疲劳强度,为产品设计和工程决策提供数据支持。电液伺服疲劳试验机是一种用于测试材料、零部件或结构在长时间循环负载下的疲劳性能的设备。它通过电液伺服系统控制加载和卸载过程,对被测试材料施加循环负载,模拟实际工作条件下的应力变化。电液伺服疲劳试验机通常由加载系统、控制系统、数据采集系统和测试夹具组成。加载系统一般采用液压缸或伺服电机进行加载,能够模拟各种不同的载荷形式和载荷变化速率。控制系统负责对加载系统进行控制,实现预设的加载规律和循环次数。数据采集系统用于实时采集和记录试验过程中的加载、变形和应力数据,以评估试样的疲劳性能。测试夹具用于固定和保持试样的位置和形状,确保试样在试验过程中的可靠加载。电液伺服疲劳试验机广泛应用于材料研究、零部件寿命评估、结构强度验证等领域。它可以帮助工程师了解材料的疲劳寿命、疲劳裂纹扩展行为以及结构的疲劳强度,为产品设计和工程决策提供数据支持。[img]https://ng1.17img.cn/bbsfiles/images/2023/11/202311270901278927_4169_1602049_3.png[/img][img]https://ng1.17img.cn/bbsfiles/images/2023/11/202311270901278908_4908_1602049_3.png[/img][img]https://ng1.17img.cn/bbsfiles/images/2023/11/202311270901279240_9360_1602049_3.png[/img]
伺服系统拉力试验机与变频系统拉力机的区别 拉力试验机的基本功能:拉伸性能,拉伸强度与变形率,拉断力,抗撕裂性能,热封强度性能,滚筒剥离试验,90度剥离,绳类拉断力,裤型撕裂力,180度剥离,压缩试验,弯曲试验,剪切试验,顶破试验等完成不同的试验,根据客户的需求不同,可以安装不同的夹具,宽试样夹具,日式夹具,英式夹具等符合多个国家的标准。 试验机主机与辅具的设计借鉴了国外的先进技术,外形美观,操作方便,性能稳定可靠。计算机系统通过控制器,经调速系统控制伺服电机转动,经减速系统减速后通过精密丝杠副带动移动横梁上升、下降,完成试样的拉伸、压缩、弯曲、剪切等多种力学性能试验,无污染、噪音低,效率高,具有非常宽的调速范围和横梁移动距离,另外配置种类繁多的试验附具,在金属、非金属、复合材料及制品的力学性能试验方面,具有非常广阔的应用前景。同时可根据GB、ISO、JIS、ASTM、DIN及用户提供多种标准进行试验和数据处理。该机广泛应用于建筑建材、航空航天、机械制造、电线电缆、橡胶塑料、纺织、家电等行业的材料检验分析,是科研院校、大专院校、工矿企业、技术监督、商检仲裁等部门的理想测试设备.伺服系统拉力试验机与变频系统拉力机的区别有哪些呢? 简单的说:伺服是一个闭环控制系统,而变频器通常工作于开环控制,所以无论从速度还是精度上,变频器都无法和伺服相比。 其实变频只是伺服的一个部分,伺服是在变频的基础上进行闭环的精确控制从而达到更理想的效果。 变频器只是一个V-F转换,用于控制电机的一个器件。而伺服是一个闭环的系统。简单说变频器主要控制电机的转速。伺服是既可以控制速度,又可以控制位置和移动量,力距,定位,从而达到精确、稳定,不会因变频而产生死机。伺服不仅能达到以上的功能,而且产生一个闭环的系统,从而避免变频器产生的辐射。变频器在变频过程中还会产生大量热量,造成温度的提高与声音,而伺服系统是不会产生这样的后果。所以说伺服系统的达到的效果是变频电机无法比拟的。 伺服电机都是同步电机,其转子转速就是电机的实际转速,不存在速度差,而变频器控制对象是异步电机,其实际转速跟转子转速存在着转差,所以它本身电机在速度就不是很稳定。 伺服的基本概念是准确、精确、快速定位。变频仅仅是伺服控制的一个必须的内部环节,伺服驱动器中同样存在变频(要进行无级调速)。但伺服将电流环速度环或者位置环都闭合进行控制,这是很大的区别。除此外,伺服电机的构造与普通电机是有区别的,要满足快速响应和准确定位。同步伺服的成本价格及其昂贵,这样在现场应用允许的情况下多采用交流异步伺服,这时很多驱动器就是高端变频器,带编码器反馈闭环控制。所谓伺服就是要满足准确、精确、快速定位,所以往往只有高端的产品才采用伺服系统。 变频最早只是用来调速,无论同步还是异步电机都可以用,并不用来完成精确定位跟踪的工作,伺服本身的功能就是精确快速定位跟踪,变频器一般做不到这个效果。 应用方面: 由于变频器和伺服在性能和功能上的不同,所以应用也不大相同。 1、在速度控制和力矩控制的场合要求不是很高的一般用变频器,也有在上位加位置反馈信号构成闭环用变频进行位置控制的,精度和响应都不高。现有些变频也接受脉冲序列信号控制速度的,但直接控制位置不准确。 2、在有严格位置控制要求的场合中只能用伺服来实现,还有就是伺服的响应速度远远大于变频,有些对速度的精度和响应要求高的场合也用伺服控制,能用变频控制的运动的场合几乎都能用伺服取代,但关键是在价格方面伺服远远高于变频。以上为伺服和变频的区别,在拉力试验机应用中明显的区别:一:螺杆:变频系统拉力机的丝杆为普通T型丝杆,伺服系统拉力机丝杆为滚珠丝杆(滚珠螺杆是滚珠与滚珠之间的摩擦,寿命较长)二:电机:变频系统拉力机的电机为一般变频电机,伺服系统拉力机为进口伺服电机三:驱动部分:变频系统拉力机为变频器加软件控制,伺服系统拉力机为进口伺服驱动。四:传感器:前者为国产传感器,伺服系统拉力机采用进口传感器。精度区别; 一般材料试验采用变频电脑控制即可,但塑料,金属材料的检测最好采用伺服控制。 变频电脑速度控制范围5mm/min~500mm/min 伺服控制速度控制范围0.001mm/min~500mm/min参数;变频拉力试验机 1、 最大负荷Max capacity: 5000N以内(任意选)2、 荷重元精度Load Accuracy: 0.01%3、测试精度 Measuring accuracy: ±1%4、操作方式 Control: 全电脑控制5、有效宽度 Valid width : 150mm6、有效拉伸空间 Stroke: 800mm(根据需要可加高)7、试验速度 Tetxing speed : 8~250mm/min (任意调)8、速度精度 Speed Accuracy: ±1%以内;9、位移测量精度Stroke Accuracy: ±1%以内;10、变形测量精度Displacement Accuracy: ±1%以内11、安全装置 Safety device: 电子限位保护,紧急停止键 Safeguard stroke12、机台重量Main Unit Weight : 约85kg伺服系统拉力机最大试验力 10kN 20kN 50kN 100kN 200kN 300kN 测量范围 最大试验力的0.2%—100% 试验力示值准确度 优于示值的±1% 试验力分辨力 1/500000(全程不分档或等效七档) 横梁位移测量精度 分辨率高于0.0025mm 变形测量精度度 ±0.5% 试验调速范围 0.001—500mm/min 无极调速 速度控制精度 ±1%(0.001~10mm/min); ±0.5%(10~500mm/min) 恒力、恒变形恒位移控制范围 0.2%-100%FS 恒力、恒变形恒位移控制精度 设定值<10%FS时,设定值的±1%以内设定值≥10%FS时,设定值的±0.1%以内 变形速率控制精度 速率0.05%FS时为±2.0%设定值内速率≥0.05%FS时为±0.5%设定值内 夹具 形式 楔形夹具体 平钳口 0-7mm 0-14mm 0-20mm 圆钳口 φ4-φ9mm φ4-φ14mm φ9-φ32mm 最大拉伸空间 600mm 最大压缩空间 600mm 有效试验宽度 450mm 570mm 整机电源 单相220V±10%,50Hz 三相,380V±10%,50Hz 工作环境 室温—35℃,相对湿度不超过80% 主机尺寸 850×600×1950mm 1000×750×2260mm 1110×760×2600mm 重量 620kg 1300kg 2200kg (以上参数可以根据需求定做)










 我要推广仪器
我要推广仪器
 下载APP
下载APP