推荐厂家
暂无
暂无







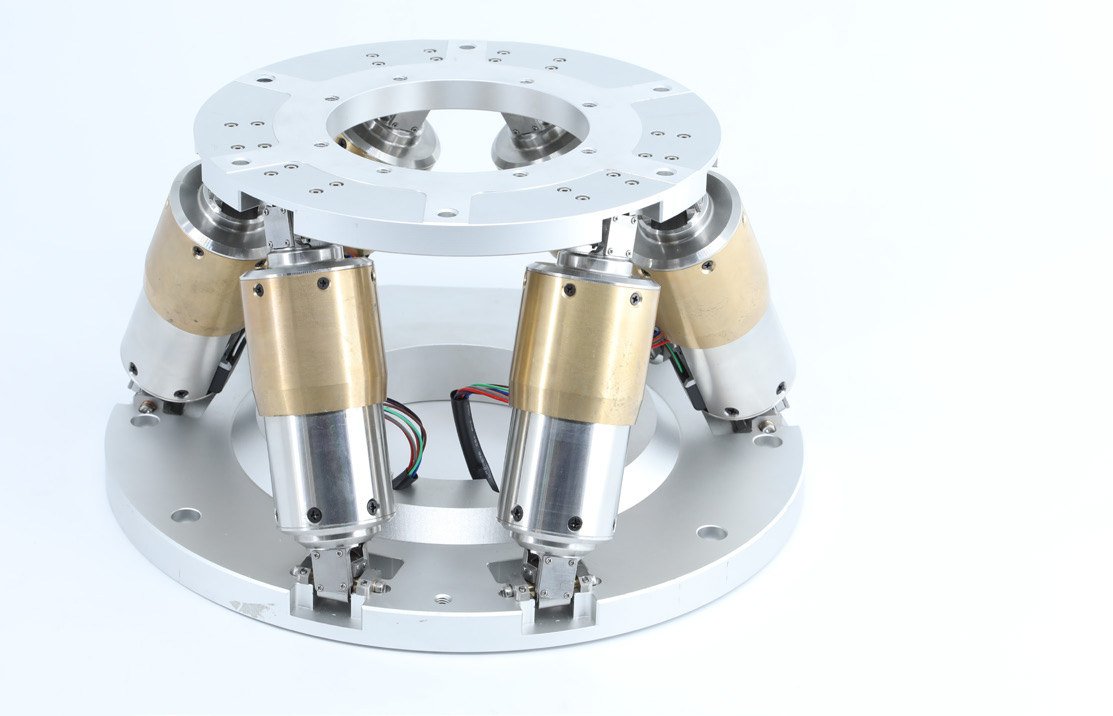
机器人减速机采用双支撑支持机构和针轮机构。这种机构特点其具备高可靠性、高刚度、高精度、大力矩的特性;同时,为了支持更大的载荷,其内部装有大型角接触球轴承。出厂时该减速机内部已封装有润滑脂,独特的输入花键轴和电机法兰,可以与任何伺服电机相匹配。该减速机有法兰输出和轴输出两种输出形式。广泛应用于工业机器人、五面体加工中心以及数控旋转台等领域。http://ng1.17img.cn/bbsfiles/images/2013/11/201311021404_475069_2814155_3.jpg机器人减速机机型为中空结构,这使设计拥有更发的灵活性,使线缆及其他必要的设备可以轻松穿过中空轴孔,在机器人的设计中采用这种中空方式结构设计,可使电缆由减速机中部穿过,使机器人结构简单,体积更小。机器人减速机是一款高精度、高扭距、高刚度、高可靠性、承受大载荷、追求简单实用,已经在工业机器人、机床、半导体生产设备、包装机械、雷达等领域有广泛的应用。机器人减速机的寿命而言,扭力计算非常重要,并且要注意加速度的最大转矩值(TP),是否超过减速机之最大负载扭力。适用功率通常为市面上的伺服机种的适用功率,减速机的适用性很高,工作系数都能维持在1.2以上,但在选用上也可以以自己的需要来决定。

机器人减速机采用双支撑支持机构和针轮机构。这种机构特点其具备高可靠性、高刚度、高精度、大力矩的特性;同时,为了支持更大的载荷,其内部装有大型角接触球轴承。出厂时该减速机内部已封装有润滑脂,独特的输入花键轴和电机法兰,可以与任何伺服电机相匹配。该减速机有法兰输出和轴输出两种输出形式。广泛应用于工业机器人、五面体加工中心以及数控旋转台等领域。机器人减速机机型为中空结构,这使设计拥有更发的灵活性,使线缆及其他必要的设备可以轻松穿过中空轴孔,在机器人的设计中采用这种中空方式结构设计,可使电缆由减速机中部穿过,使机器人结构简单,体积更小。同时也是一款高精度、高扭距、高刚度、高可靠性、承受大载荷、追求简单实用,已经在工业机器人、机床、半导体生产设备、包装机械、雷达等领域有广泛的应用。机器人减速机的寿命而言,扭力计算非常重要,并且要注意加速度的最大转矩值(TP),是否超过减速机之最大负载扭力。适用功率通常为市面上的伺服机种的适用功率,减速机的适用性很高,工作系数都能维持在1.2以上,但在选用上也可以以自己的需要来决定。http://ng1.17img.cn/bbsfiles/images/2013/11/201311041642_475303_2814155_3.jpg机器人减速机的技术优势:① 齿高较低,不需要很深的啮合距离就可以获得较大的啮合量,可承受较大的扭矩。② 齿宽较大,齿根弧度增大,减少发生断裂失效的风险。③ 由于所需柔轮变形量较小,可使柔轮的寿命得到极大提高。④ 多达20%~30%的齿参与啮合,齿面比压较小。
[align=left] 日前,第7届中国国际机器人展览会在上海国家会展中心盛大开幕。中国国际机器人展览会(CIROS)是由中国机械工业联合会、中国机器人产业联盟以及上海中机联展览有限公司联合主办的中国首个机器人全产业链国家级展览平台,是海内外主要机器人行业组织共同打造的机器人行业最专业展会。[/align][align=left] 江苏省计量科学研究院的战略合作伙伴南京熊猫电子装备有限公司作为中国机器人展区最大的参展商,在会上展示了智能机器人检测中心、智能工厂、工业机器人教学工作站等单元。其中,智能机器人检测中心由江苏省计量院国家精密机械加工装备产业计量测试中心提供测试服务。产业计量中心在展会现场根据ISO9283标准为南京熊猫电子装备有限公司的工业机器人提供位姿准确度、位姿重复性、轨迹精度等参数的测量,并将测量数据实时地展示,使观众直观地感受到工业机器人的性能表现。[/align][align=left] 此次现场合作充分体现了江苏省计量院产业中心服务客户的专业水平,展现了产业中心在精密机械加工装备产业中良好的测试能力。[/align]
 400-628-5299
400-628-5299
 留言咨询
留言咨询
 400-860-5168转4543
留言咨询
400-860-5168转4543
留言咨询
 400-860-5168转2623
留言咨询
400-860-5168转2623
留言咨询










 我要推广仪器
我要推广仪器
 下载APP
下载APP


