多普勒流量计类型比较
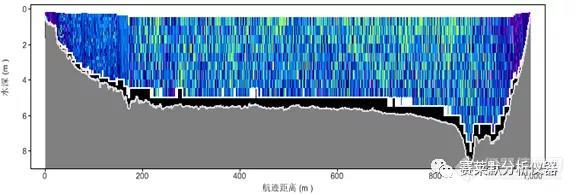
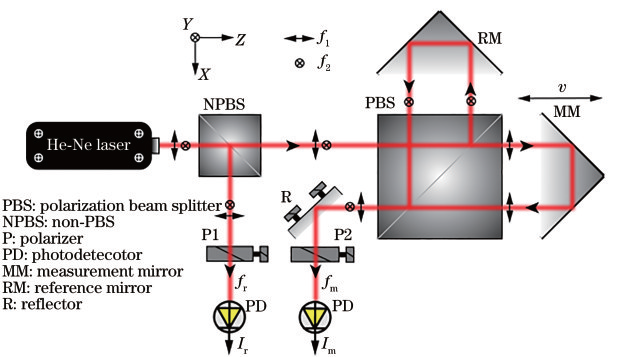
声学多普勒的水流测量系统是水与废水行业中的主要工具,不仅测量水流速度,还可以测量水位以及计算流量(排放量),并且测量数据的输出格式可轻松实现上传到商业数据记录器、SCADA系统、PLC以及远程遥测设备。仪器常用到名称如下:# ADFM–声学多普勒流量计# ADVM–声学多普勒流速# AVM–面积流速型流量计#“超声波”流量计上述术语有时可以互换使用,如“多普勒”。但并非所有多普勒系统均采用相同的工作方式,用于流量测量的多普勒系统大致可以分为两类:连续波 (CW) 和脉冲。SonTek声学多普勒系统(例如SonTek-IQ)就是脉冲多普勒,连续波式或脉冲式多普勒是否适合于特定场所将取决于环境因素和精度要求。价格通常被视为连续波式与脉冲式多普勒流量计之间的主要区别,有时这也是选择仪器时最重要的考量。然而,对大多数操作人员和管理人员而言,了解技术差异及其在野外环境的意义将有助于作出明智的选择,同样关系到设备操作、数据质量保障和未来的决策。本技术说明旨在从实践的角度阐明某些重要的技术差异。声学多普勒流速测量系统采用多普勒频移的物理原理来测量水流速度。多普勒原理指出了,如果声源相对于接收器运动,则接收器处的声音频率会与发射频率相偏移。请注意,多普勒系统实际上并未直接测量水流速度,而是测量悬浮在水柱中的散射颗粒的速度,并假设颗粒的运动速度与水流速度相同。如果没有反射信号的散射颗粒,则多普勒系统将无法测量速度。反射信号的振幅将随着水中散射颗粒的密度、颗粒材料及其在发射频率下的声波反射率以及与换能器的距离而变化。传输的声波信号从换能器呈几何图形传播,而且声音也被水所吸收。传输损耗与系统范围的平方成正比,而反射信号强度降低到系统噪声等级的距离决定了最大测量范围。需要注意的是此类多普勒系统无法直接测量流量(排放量)。流量是基于测得速度、测得水位和渠道截面积而计算出的参数。由于系统仅测量声波所在的渠道的部分水流速,因此使用教科书理论模型或特定于地点的校准(指标流速率定)将仪器测得的速度与平均流速相关联。然后将平均流速 (V) 乘以渠道截面积 (A) 以求出流量值 (Q=VA),其中渠道截面积由用户提供的有关渠道几何形状、仪器位置以及所测水位的信息所确定。因此,流量的准确度部分取决于估算流量时,渠道流速分布的信息量。以下是笔直且洁净的混凝土衬砌运河(显示的典型现场照片)中不规则速度分布的部分示例,这是在SonTek-IQ的开发过程中使用FlowTracker手持式ADV系统在密集间隔的离散单点中测得的流速:如示例中所示,渠道中的速度分布通常是不均匀的,并且边界层(如渠道的底部或侧面)附近的速度通常明显较低。仪器常用到名称如下:# 由于速度数据中的任何误差都会导致计算出的流量出现误差,因此仪器的速度测量精度至关重要。# 用户给出的渠道几何形状和仪器位置的误差将导致计算出的流量出现误差。# 将仪器测得的速度与平均流速相关联的方法将影响所计算出的流量的精度。多普勒原理同其他原理比较时,“多普勒”概念容易被默认为成“连续波”,这种误解会导致混淆和歪曲。由于多普勒的脉冲和连续方式是完全不同的,因此了解引用哪种多普勒方法总是重要的,本节将对此进行解释。连续波系统通常是单波束解决方案,这意味着采用单波束来接收声波信号。如果多普勒系统没有被定位为“脉冲”、“剖析”或“距离选通”仪器,则通常默示其为连续波系统。连续波系统最常使用独立的发射和接收换能器,从而发射相对于水深的长声脉冲。本质上,系统将连续信号发射到水中,同时监听信号反射。因此,接收的信号是沿声束范围里,所有散射介质的反射信号振幅与相位组合,任何空间信息都是未知的,因为不可能将特定回声信号与沿波束的对应位置关联。尤其是在浅水区,有些连续波系统更容易测量到从水面或河床反射的信号,因为连续波系统不跟踪反射来自哪个位置。这些错误的边界反射会给真实的测量带来明显的噪声和偏差。脉冲式多普勒系统(如SonTek-IQ)在水中传输短的声波脉冲,然后分段侦听反射信号,依据脉冲传输后的时间转换成脉冲在水中的传播距离,从而确定了作为信号源颗粒的位置。通过测量发射脉冲后的特定时间内反射的声波信号,系统能够测量水速的剖面,其中的水柱分成多个深度单元(也称为距离单元或层)。在每个单元中,水速是根据测量的声学数据计算的。这样做的效果是提供了从底部到水面的许多离散的、紧密间隔的测量数据。一些脉冲多普勒系统将报告来自单个测量单元的流速,而不是输出测量的剖面流速。也就是说,他们在得到速度剖面后计算平均速度。由于每个脉冲多普勒换能器既是发射器又是接收器(称为“单站”),因此系统在发射信号后必须等待一小段时间,以便有时间从系统中清除发射脉冲。这种暂停会在系统旁边产生一个无法收集数据的区域,这被称为“盲区”。SonTek-IQ系统具有四个用于测量水流速度的换能器:两束与测量上游和下游的系统的轴线对齐两束对系统侧面进行测量的偏斜波束因此,SonTek-IQ可以解释整个渠宽上某些水平速度的变化。另外,除压力传感器外,还具有一束用于精确测量水深的声束。连续波 (CW) 多普勒系统通常使用单声束来接收已被水中悬浮颗粒所反射的信号。通常,将系统置于渠道、管道或水流的中间,这意味着要测量的水流速度处于仪器前方的渠道中心。有些型号集成了用于测量深度的压力传感器。脉冲多普勒系统使用两个或多个声束来接收已被水中悬浮颗粒所反射的信号。声束被进一步“划分”为可测量整个水柱中各层水流速度的离散单元。对于SonTek-IQ,共有四束声束-一束在渠道中心朝向上游,一束在渠道中心朝向下游,一束偏斜声束朝向渠道右侧,一束偏斜声束朝向渠道左侧。SonTek-IQ还具有用于测量水深的第五束声束以及压力传感器。SonTek-IQ Plus版本提供了流量监测解决方案,适用于深度最大为5m的较大运河和自然环境。具有在水平和垂直方向跨渠道采集小至2cm的单元中的速度分析数据的功能。连续式多普勒系统连续、同步收发的运行方式,其中一个影响称为范围偏置。由于传输的信号与系统的距离越来越弱,因此距离传感器较近的粒子的声学反射对接收信号的影响将大于距离较远的信号。如果通道中的速度分布均匀,则靠近传感器的散射粒子的影响就无关紧要了。但如前所述,通道中的速度通常不均匀。位于发射端附近的散射颗粒产生的更强信号影响,会导致对离系统更近的声波反射产生范围偏差。由于声传输损耗(衰减、吸收),测距偏差问题随着渠道深度的增加而增加。■ 因此由于最大速度通常出现在水面下方,连续波系统的最大渠道深度会受到限制。例如,在水面附近可能存在对实际总流量有着重大影响的高流速情况,但是来自近水面速度的信号输入可能比来自靠近底部的较慢速度的信号输入要弱。通常情况是,底部沉积物浓度较高或颗粒较大,因此具有较强的反射特性。更为复杂的是,这种偏差会随着时间和条件而变化。散射颗粒通常在整个水柱中分布不均匀,并且不同材料的颗粒将具有不同的反射特性。例如,矿物沉积物将具有不同于絮凝剂的散射和反射特性,并且水柱中是否存在沉积物云团及其位置都能够引起幅值不断变化的偏差。在高动态的环境条件下。■ 因此即使在不同流量下校准连续波系统的做法,也可能无法解释和满足存在的众多未知变量。脉冲多普勒系统不受测距偏差的影响。由于系统专为测量精确定时的、以空间为参考的速度数据而设计,因此诸如SonTek-IQ类的脉冲多普勒系统通常会提供更高的速度精度、更高的速度范围和深度范围,从而可以计算出准确的排放量(流量)数据。■ 因此脉冲多普勒系统被认为在更大范围的条件下,尤其在因水力学、水质、颗粒大小和成分而变化的环境中,有更高的可靠性。多普勒流量计(如图所示的SonTek-IQ)根据从水中颗粒反射回来的信号来测量水流速度。通常,水流速度(由箭头表示)随深度和与边界的距离而变化,从而形成速度(流量)剖面(由曲线表示)。对于诸如SonTek-IQ之类的脉冲多普勒系统,颗粒的形状、大小和在水中的分布不会使速度测量结果产生偏差,因为每个测量结果均由在水柱中多个已知位置进行的多次测量组成。即使条件发生变化,脉冲多普勒系统也会捕获速度剖面信息。当流量发生变化或颗粒浓度随每日、季节性或运行因素而变化时,这将获得更精确的测量结果。由于连续波系统缺乏检测流量剖面的能力,因此通常依赖于流量校准,对于每种新的流量或颗粒条件,都可能需要重新校准。SonTek-IQ在意大利普利亚地区Vasca Tavoliere的部署示例。该定制安装架是由Consorzio di Bonifica della Capitanata设计的,旨在安全高效地维护仪器。声学多普勒流量计的典型硬件组件。连续波 (CW) 和脉冲多普勒系统均可采用一体或分体式配置。脉冲多普勒SonTek-IQ(左图)由包含传感器、处理和通讯电子设备的单个单元组成。大多数连续波系统由两个组件组成,传感器通过电缆连接到装有处理和通信电子设备的顶盒。多普勒仪器的波束角(声束“向上投射”到水中的角度)取决于制造商和某种型号。由于波束角会影响本仪器的有效测量范围,因此是一个重要参数。SonTek-IQ采用与垂直方向成35°的波束角,这意味着波束更为垂直。相反,许多连续波系统采用更为水平的波束角,例如与水平方向成20°角。当以更大的水平角度发送时,声脉冲在到达水面之前有着更长的传播距离,传播距离越长,连续波系统的信号越易衰减。在某些情况下,较深的水环境可能导致信号强度不足以测量水柱的中层或上层。某些连续波型号在低功率设置(首先产生较弱的信号)下运行,这进一步增加了在较长距离下信号丢失的可能性。■ 因此在较高的水位下,较大的水平波束角会使测量结果偏向靠近河床的水流速度。同样,通常会针对此类偏差或无法测量的区域校准连续波传感器,但如果环境条件不够稳定,则水深、流态或颗粒条件的任何变化(无论好坏)都会影响信号衰减,因此需要更改校准以保持数据准确性。由于连续发射和接收信号,连续波系统通常具有最小盲区要求极低的优势。■ 因此连续波系统可以在比脉冲多普勒系统更浅的深度进行测量,具体取决于换能器的设计和尺寸。此外,连续波系统通常采用分体两件式设计,并使用一根小型水下传感器电缆将其连接到位于水面某处的大盒子上。由于可以将处理电子设备、记录器和通信模块放置在较大的顶侧盒中,因此可以将水下传感器外壳作得更小,并且可以在较浅的深度进行测量。脉冲多普勒系统可以采用一体或分体式设计。SonTek-IQ是单个单元,只需连接到外部电源即可运行。但是,由于系统包含处理电子设备和内部记录器并采用了更多的声换能器,因此其尺寸可能比大多数连续波设计中可能采用的小型水下传感器要大。此外,如前所述,诸如SonTek-IQ类的脉冲多普勒在传感器面附近设计了最小的盲区。有时,与连续波式多普勒相比,脉冲式多普勒对操作深度的要求更高。SonTek-IQ采用与垂直波束角呈35°的角度,而许多连续波系统则采用通常未在文档中指定的更为水平的波束角。由于波束角的不同,许多连续波系统在较高水位时可能遭受更大的信号衰减,从而导致流场上层的采样不足或完全不可测的区域。如果低流量和低速度是预期条件,则必须注意连续波系统的工作原理可能会更受限制。由于连续波系统同时发射和接收信号,发射信号会干扰连续波系统检测多普勒频移为零的能力;因此无法检测到零速或低速。因此,连续波系统将表现出最低流速限值,低于该速度将无法可靠运行。脉冲多普勒系统通常没有流速限值规定。由于发射和接收脉冲都是定时的,因此脉冲多普勒电子设备能够检测与发射信号分离的零多普勒频移信号。这样,最低流速限值实质上即为系统的速度分辨率。这在存在回水条件、双向流动和分层流动的区域中提高了脉冲多普勒的功效,在这些区域中,速度较低和接近零的可能性更大。任何多普勒仪器收集的原始数据都是速度数据。尽管经常被忽略,但需要注意的是多普勒仪器如何将测得的速度转换为流量值。正如前面所讨论的,连续波系统不提供任何有关水柱中速度分布的信息。其单一测量结果是波束路径中可检测到的所有声反射的组合。总信号可能受到水柱中沉积物浓度的衰减和变化以及总测距偏差的影响。■ 因此通常需要校准连续波系统,以便以任何精度将测得的速度与实际平均渠道速度相关联。进行此校准时,仅在特定的校准条件下才可靠。对于条件一致且不变的地点,连续波系统的性能应与脉冲多普勒系统类似。然而,为了使连续波系统能够提供准确的速度数据,流场条件的任何变化都需要重新进行校准。在由于降雨、回水、底部附近的高沉积物负荷等可能导致条件变化的应用场合,将需要重新校准以涵盖每种特定情况。如果需要一定的精度要求,则应谨慎考虑设备、人工或服务中的初始校准费用和和潜在的持续校准费用。某些连续波系统会发布流量精度规格,即使流量是如上所述基于环境因素以及客户提供的并非直接测得的详细信息(例如渠道截面积)而计算得出的参数。这些流量精度规格通常依赖于理想、简化和不变条件的假设,因此,应谨慎对待。SonTek-IQ标准模型可测量速度剖面,然后处理数据以输出单个测量单元,并使用理论模型计算流量。SonTek-IQ Plus和SonTek-IQ Pipe模型可提供速度剖面,计算流量时,它们允许用户在使用理论模型或指标速度校准之间作出选择。与连续波系统相同,特定场所的率定可以比理论模型更准确地将测量速度与实际平均渠道流速关联。SonTek-IQ对多波束的引用进一步满足了更多选择,在流场内找到一个波束和区域随着条件的变化,提供最稳定的关系。对于SonTek-IQ,流量算法专为应用于小渠道、灌溉沟渠、排水渠、管道等而设计,其独特的波束几何形状在详细研究此类应用(第2页的参考图)速度条件的基础上,考虑了渠宽上的水平速度变化并提高了理论流量计算的性能。由于流量计算的多个变量取决于操作人员和环境特征(渠道截面积测量、仪器安装与设置、水力特性等),因此,SonTek发布了SonTek-IQ系统的速度精度而不是流量精度规格。建议根据公认的ISO或其他政府规定的标准,采用适当的现场技术和仪器(例如便携式机械流量计、声学多普勒流速计或声学多普勒流速剖面仪)定期评估并检查现场的流量精度。SonTek可应要求提供有关这些标准和方法的其他参考资料。在多普勒系统中,SonTek-IQ的另一个特点是同时使用中心线波束和偏斜波束。偏斜波束允许朝着渠道两侧测量速度。这些附加信息有助于更全面地理解整个测量横截面的流量。如果并未测量某个点的实际速度剖面,则可能尤其难以准确量化明渠流量条件,即使只是偶尔作为检测分析也是如此。如果没有这些附加信息,则用于根据测得的速度数据计算流量的方法通常需要依赖假设和估计。SonTek-IQ Pipe旨在用作可在大多数工业或农业应用中使用的底部或顶部安装式流量计。它可以提供从0.5m一直到5.0m的管道中的精确流量值,而与是否满管无关。尽管多普勒流量计可能精度极高,但用户设置和对细节的关注同样可能影响流量数据的优劣。尤其重要的是应验证传感器安装处的横截面尺寸。参考文献:1.SonTek-IQ Principles of Operation (2017).SonTek, A Xylem Brand, version 2.1.2.Schmitt, A., Huhta C., and Sloat J. (2012) Flow Modeling and Velocity Distribution in Small Irrigation Canals, SonTek, A Xylem Brand.3.Cook, M., Huhta C. (2013).Improved Water Resource Management using an Acoustic Pulsed Doppler Sensor in a Shallow Open Channel, SonTek, A Xylem Brand.4.Polonichko, V., Romeo, J. (2007).Effects of Transducer Geometry and Beam Spreading on Acoustic Doppler Velocity Measurements Near Boundaries, SonTek, A Xylem Brand.5.Metcalf, M.A. and Edelhauser,M.(1997) Development of a velocity profiling Doppler flow meter for use in the wastewater collection and treatment industry.Paper Presented at WEFTEC ’97.6.Wastewater Quality Monitoring and Treatment Edited by P. Quevauviller, O. Thomas and A. van der Beken C _2006 John Wiley & Sons, Ltd.


























 我要推广仪器
我要推广仪器
 下载APP
下载APP