振动试验机选择及试验可否判断的要素
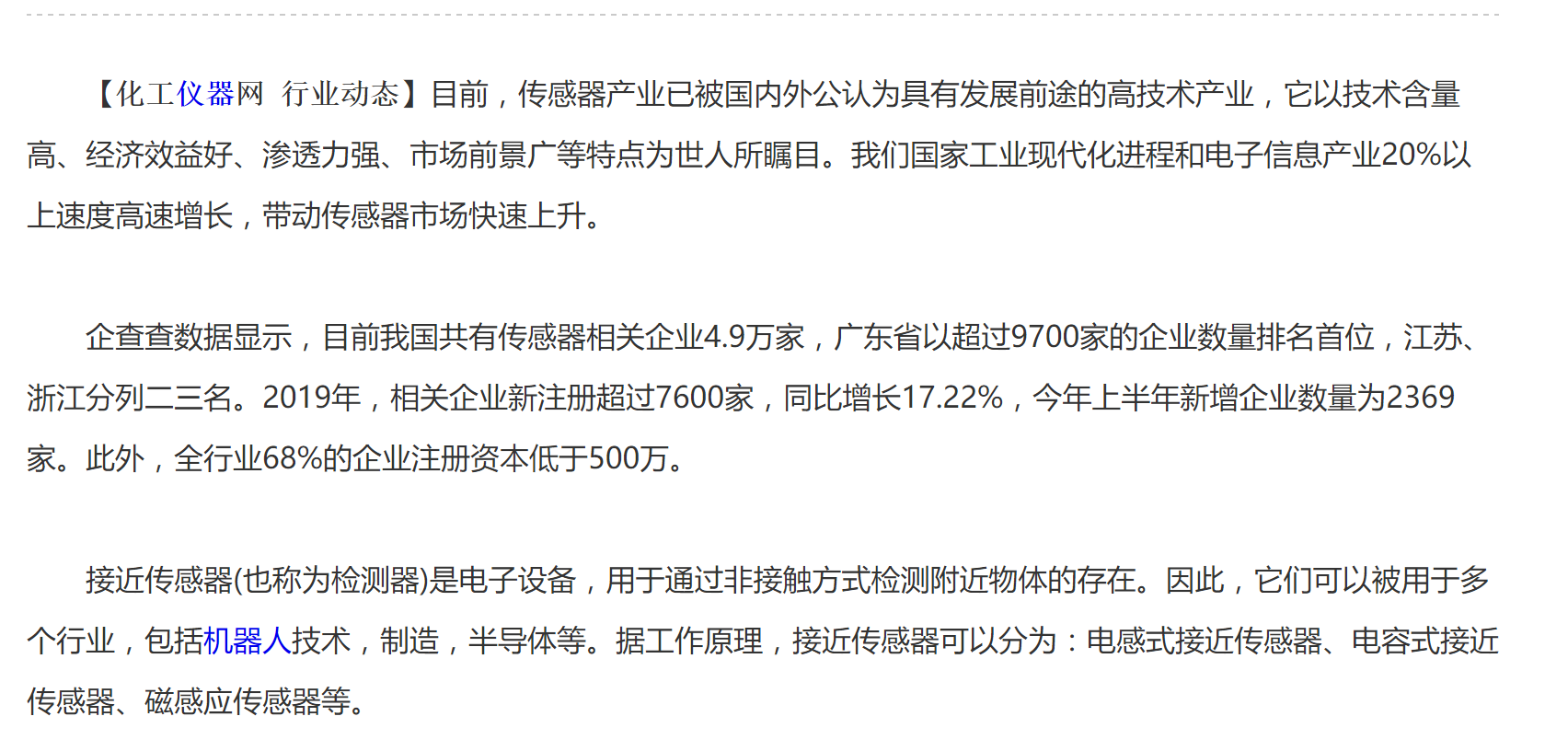
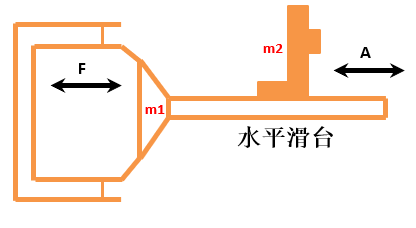
通过前文介绍,相信初入者对振动试验系统应该有一定了解。特别是电动式振动台推力有1~60tonf,针对试验条件和试验体,如何选择合适且经济的振动台进行试验?下面进行阐述。试验前,必须明确试验条件和要求。需要考虑的要素如下:※有没有试验规格※振动台式样规格※试验种类:正弦试验、随机试验、冲击试验、etc.※频率范围※加速度、速度大小※振幅(位移)大小※试验体的尺寸、质量、形状等※夹具的尺寸、质量、形状、共振点等※振动方向(垂直、水平、二轴同时振动、三轴同时振动)※是否和温度、湿度、高度(气压)、光照等条件复合试验※试验的控制点、检测点、控制误差范围等※其他特殊要求等试验规格介绍1.ISO(International Organization for Standard,国际标准化机构)2.CCC(China Compulsory Certificate System),GJB(国军标),GB(国标)3.MIL(Military Specifications and Standard,美军标)4.IEC(International Electro-technical Commission,国际电气标准会议)5.EN(European Norm)6.JIS(Japanese Industrial Standard,日本工业规格)7.各个公司内部规格BMW,TOYOTA, HONDA, SONY, SHARP, Panasonic。要读懂试验规格是一件很困难的事情,只能在实践中慢慢去理解,多请教,多学习。振动试验机的式样规格各个厂家的设备目录中记载有很多参数和规格,一般标准振动台以下几个参数比较重要,加振力:10kN、20kN、30kN、、、、、600kN最大正弦加速度:1000m/s2最大正弦速度:2m/s、2.5m/s最大位移:51mm、76mm、100mm使用频率范围:5Hz~3000Hz动圈质量:加振力不同,质量不同。这些规格参数代入前面的A、V、D、f四者之间的计算公式,即可以得到设备的交越频率和最大正弦能力特性曲线图(无负载)。再结合牛顿第二定律计算出各种负载下的最大加速度,继续使用上面的式子,可得到各种负载下的交越频率和能力特性曲线图。最大正弦能力特性曲线图(无负载情况):图中可以看出,电动振动台有三个工作区域,低频段对应位移区域,低中频段对应速度区域,中高频段对应加速度区域。或者说低频段受最大位移限制,低中频段受最大速度限制,中高频段受最大加速度限制。每个物理量对应频率变换点就是交越频率。因此,如果说5Hz的时候需要满足加速度500m/s2,或者1000Hz的时候满足位移50mmp-p,那就是外行话了。例题:某电动振动台使用频率范围5~2000Hz,最大位移51mmp-p,最大速度2m/s,最大加速度1000m/s2,请计算位移到速度,速度到加速度的两个交越频率,并试着画出该设备无负载最大能力特性曲线图。图中可以看出,25kg负载情况下,蓝线以下(含蓝线)的试验条件该设备都可以对应。超出蓝线对应的话,导致设备故障损坏。个人经验,振动台的损坏,一半以上都是过负载原因造成的,切记。试验条件的确认试验的种类:正弦试验、随机试验、冲击试验、etc。试验频率范围f加速度大小A、加振力F=∑mA(下节重点叙述)振幅(位移大小)D速度大小V1. 正弦定频试验的场合试验条件:频率10Hz 加速度10G半位移峰值D0-p = A0-p/(2πf)2 = 10×9.8/62.82 = 24.85mm全位移峰峰值49.70mm (注意半位移和全位移的倍数)一般振动台的全位移峰峰值有51mm、76mm、100mm,为了安全起见可以选76mm的设备。(请再计算一下速度的峰值。)注意:①控制仪输入f、A、D、V中的两个参数,会自动得出另外两个参数。4个量都不可以超过振动台式样规格。②扫频试验的时候取最大值。③正弦试验一般各个参数小于试验机的规格值即可,一般安全系数1.2~1.3。④以上计算都假定没有夹具和试验体的共振影响。2. 随机试验的场合加振力试验加振力rms≦随机额定rms(必要时需要试验PSD的等价频幅修正)速度3✖试验rms≦正弦波额定速度峰值位移3.5✖试验rms≦正弦波额定位移峰值☆☆☆加速度rms、速度rms、位移rms值的计算比较复杂,可以通过振动控制仪输入PSD值之后,自动得出数据。3. 冲击试验的场合加振力F= ∑mA∑m:总质量(动圈质量+夹具质量+ 试验体质量)速度≦正弦波额定速度峰值位移≦正弦波额定位移峰值☆☆☆速度、位移峰值的计算比较复杂,可以通过振动控制仪输入冲击脉宽和加速度之后,自动得出数据。规格标准不同,数值结果不同。IEC标准:MIL标准:试验体的尺寸、质量、形状、固定方式① 试验体直接固定动圈或垂直扩张台(垂直方向),水平滑台(水平方向),还是先固定在夹具上再固定在台面上?② 试验体尺寸有没有超出台面,有没有碰到其他地方(三综合恒温恒湿箱内壁等)?③ 各重心是否都在一直线上,重心是不是偏高?振动台台面的抗倾覆力矩是否在允许条件下?④ 固定螺栓全部固定好了?固定后是否会在振动时候倒下来?⑤ 夹具是不是要提前准备?⑥ 夹具共振点是多少?是不是在试验频率范围内?⑦ etc.。各种夹具的确认试验体固定在夹具上的位置和尺寸、夹具的共振点、夹具固定在振动台面上的间隔( □100mm,φ50mm,φ100mm ),螺钉大小( M6,M8,M10,M12等),公制(mm)还是英制(in.)?下面介绍一些常见的试验夹具。垂直扩张台面(Vertical Table):水平滑台(Slip Table): 其他夹具:总结一次振动试验的顺利完成需要考虑的要素很多,以上只是列举了一些基本要素。此外还涉及到振动控制仪的设置、控制点的位置、避免夹具的共振点、加速度传感器的固定方式、试验体的m(质量)k(弹性系数)c(阻尼)、振动台的能力(动圈特性、功放性能等)等等要素。总之,记住一句话“振动的水很深!”。只能在不断地工作和学习中慢慢积累。备注:图片和部分文字等来源于网络,如有侵权,请联系作者本人。


























 我要推广仪器
我要推广仪器
 下载APP
下载APP