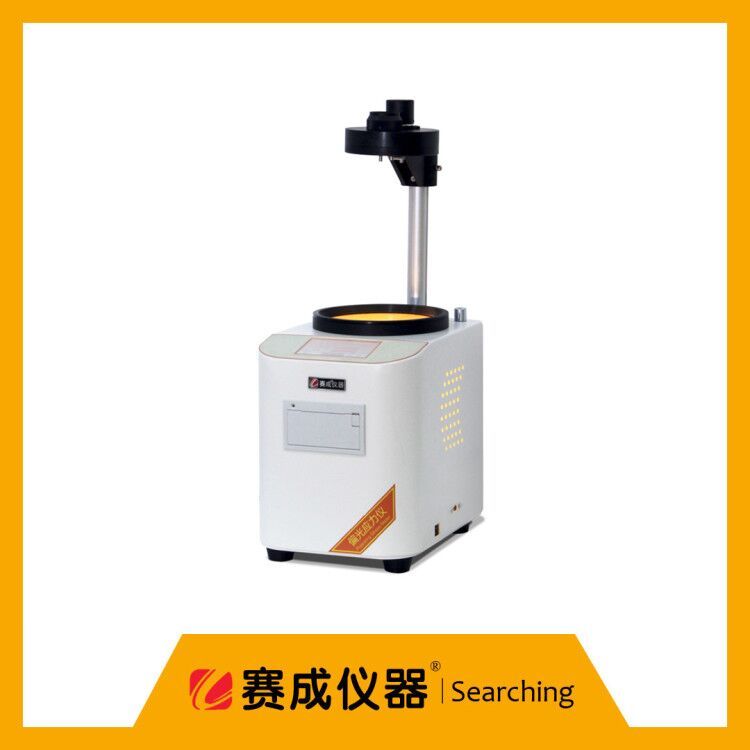
赛成发布智能偏光应力仪 YLY-H新品
产品特点◎ 定性、定量两种试验模式,试验空间可调,适用范围广。 ◎ 仪器可存储200组数据,每组数据 50个测量值。 ◎ 触摸屏显示,可同时显示测量角度及光程差数值,用户可直观获得所需数据,使测量直观易读。 ◎ 绿色节能,采用了更加节能环保的LED光源,相对传统光源节能80%以上。 ◎ 配备微型打印机,方便打印输出试验数据。 ◎ 配备USB接口,可接PC软件控制仪器运行。 ◎ 自动保存历史试验记录,本地查询,并可导出至电脑端EXCEL格式保存。 ◎ 触屏端操作用户三级权限设置,完全满足GMP权限认证。 ◎ 测试记录审计、追踪功能。 ◎ 试验结果同步上传至云端服务器保存,在世界各地,有网络就可浏览。 ◎ 本地数据与云端数据双重备份,确保数据不会丢失。测试原理YLY-H内智能偏光应力仪应用偏振光干涉原理检查玻璃内应力或晶体双折射效应的仪器。由于仪器备有灵敏色片,并应用1/4波片补偿方法,因此本仪器不仅可以根据偏振场中的干涉色序,定性或半定量的测量玻璃的内应力,还可以准确定量的测量出玻璃内应力数值。测试标准YLY-H依据标准:JJG196-2006《常用玻璃量具检定规程》GB/T4545 《玻璃瓶罐内应力检验方法》GB/T12415 《药用玻璃容器内应力检验方法》 YBB00032005-2005 《钠钙玻璃输液瓶》YBB00332002-2015 《低硼硅玻璃安瓿》应用领域基础应用适用于玻璃输液瓶、玻璃管制(模制)药瓶、管制(模制)注射剂瓶、安瓿瓶、口服液体瓶等偏光内应力测试; 还可以应用于啤酒瓶、白酒瓶等玻璃容器内应力测试。技术指标项目指标仪器示值0.1nm测量精度≤2nm偏振场直径150mm捡偏振片旋转角度-180 ~+180°光场边沿亮度>120cd/m2起偏镜至检偏镜间可调范围280mm光场的光亮度≥800lux数据保存200组每组数据50个测量值外形尺寸220mm(L)×350mm(B)×580mm(H)使用环境温度10—40 oC电源AC 220V 50Hz净重12 kg仪器配置标准配置主机、电源线选购件通讯线缆、专业软件创新点:◎ 定性、定量两种试验模式,试验空间可调,适用范围广。◎ 仪器可存储200组数据,每组数据 50个测量值。◎ 采用高精度绝对式角度编码器进行测量,测量精度优于2.0Nm。◎ 触摸屏显示,可同时显示测量角度及光程差数值,用户可直观获得所需数据,使测量直观易读。◎ 暗视场无需校准,采用了绝对式编码器,偏振场的暗视场总是处于零角度点,因此无需用户校。对零点,避免了人为校对暗视场造成的误差。◎ 绿色节能,采用了更加节能环保的LED光源,相对传统光源节能80%以上。◎ 配备微型打印机,方便打印输出试验数据。◎ 配备USB接口,可接PC软件控制仪器运行。◎ 自动保存历史试验记录,本地查询,并可导出至电脑端EXCEL格式保存。◎ 触屏端操作用户三级权限设置,完全满足GMP权限认证。◎ 测试记录审计、追踪功能。◎ 试验结果同步上传至云端服务器保存,在世界各地,有网络就可浏览。◎ 本地数据与云端数据双重备份,确保数据不会丢失。智能偏光应力仪 YLY-H






















 我要推广仪器
我要推广仪器
 下载APP
下载APP