推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 留言咨询
留言咨询

 400-860-5168转4019
留言咨询
400-860-5168转4019
留言咨询
 400-860-5168转3476
留言咨询
400-860-5168转3476
留言咨询






[color=#333333]科学技术的日新月异,时代正在向电子化,自动化,信息化,智能化等领域发展,近年通信技术和智能化信息处理技术也在迅猛的发展,使得自助式移动机器人技术达到使用化程度,传感器[/color][color=#333333]技术在其中发挥着重要的作用,其中,移动机器人智能化的一个重要标志便是自主导航,而实现机器人自主导航有个基本要求:避障。避障,是指移动机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,最后达到目标点。[/color][color=#333333][img=,306,220]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071533_01_3332482_3.jpg!w306x220.jpg[/img][/color][color=#333333][color=#333333]移动机器人避障与导航的实现方式:实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息。避障使用的传感器主要有超声波传感器[/color][color=#333333]、视觉传感器、红外传感器、[/color]激光传感器[color=#333333]等。下面我们具体说说这几个传感器的工作原理.[/color][/color][color=#333333][color=#333333][b]超声波传感器[/b][/color][/color][color=#333333][color=#333333][color=#333333]超声波传感器检测距离原理是:测出发出超声波至再检测到发出的超声波的时间差,同时根据声速计算出物体的距离。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。[/color][/color][/color][color=#333333][color=#333333][b][color=#333333][img=,644,316]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071534_01_3332482_3.jpg!w644x316.jpg[/img][/color][/b][/color][/color][color=#333333][color=#333333][color=#333333]超声波传感器一般适用于探测距离较长的应用,一般有效探测距离为32cm到6米,其中会有一个几十毫米左右的最小探测盲区。由于超声传感器的成本低、实现方法简单、技术成熟,是移动机器人中常用的传感器。此外,超声波的测量周期,不同材料对声波的反射或者吸引是不相同的,还有多个超声传感器之间有可能会互相干扰,这都是实际应用的过程中需要考虑的。[/color][/color][/color][color=#333333][b][color=#333333][color=#333333][b]红外线传感器[/b][/color][/color][/b][/color][color=#333333][color=#333333][color=#333333]红外测距都是采用三角测距的原理。红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,通过结构上的几何三角关系,就可以计算出物体距离D。[/color][/color][/color][color=#333333][color=#333333][b][color=#333333][img=,372,344]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071535_01_3332482_3.jpg!w372x344.jpg[/img][/color][/b][/color][/color][color=#333333][color=#333333][color=#333333]当D的距离足够近的时候,上图中L值会相当大,如果超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小,测量量精度会变差。因此,常见的红外传感器 测量距离都比较近,小于超声波,同时远距离测量也有最小距离的限制。另外,对于透明的或者近似黑体的物体,红外传感器是无法检测距离的。但相对于超声来说,红外传感器具有更高的带宽。[/color][/color][/color][color=#333333][b][color=#333333][color=#333333][b]激光传感器[/b][/color][/color][/b][/color][color=#333333][color=#333333][color=#333333]常见的激光雷达是基于飞行时间的(ToF,time of flight),通过测量激光的飞行时间来进行测距d=ct/2,类似于前面提到的超声测距公式,其中d是距离,c是光速,t是从发射到接收的时间间隔。激光雷达包括发射器和接收器 ,发射器用激光照射目标,接收器接收反向回的光波。机械式的激光雷达包括一个带有镜子的机械机构,镜子的旋转使得光束可以覆盖 一个平面,这样我们就可以测量到一个平面上的距离信息。 对飞行时间的测量也有不同的方法,比如使用脉冲激光,然后类似前面讲的超声方案,直接测量占用的时间,但因为光速远高于声速,需要非常高精度的时间测量元件,所以非常昂贵;另一种发射调频后的连续激光波,通过测量接收到的反射波之间的差频来测量时间。[/color][/color][/color][color=#333333][color=#333333][b][color=#333333][img=,474,378]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071536_01_3332482_3.jpg!w474x378.jpg[/img][/color][/b][/color][/color][color=#333333][color=#333333][b][color=#333333][b]视觉传感器[/b][/color][/b][/color][/color][color=#333333][color=#333333][color=#333333]视觉传感器是指:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。[/color][/color][/color][color=#333333][b][color=#333333][b][color=#333333][img=,405,340]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071537_01_3332482_3.jpg!w405x340.jpg[/img][/color][/b][/color][/b][/color][color=#333333][color=#333333][color=#333333]以上几种是最常见的几种传感器 ,各有其优点和缺点,在真正实际应用的过程中,一般是综合配置使用多种不同的传感器 ,以最大化保证在各种不同的应用和环境条件下,机器人都能正确感知到障碍物信息。[/color][/color][/color]

[font=宋体][color=#1E1F24]光电传感器与红外传感器的主要区别在于它们的工作原理和用途。[/color][/font][font=宋体][color=#1E1F24]光电传感器通常使用光敏元件(如光敏电阻、光电池等)来检测光线或可见光的强度。当光线照射到光敏元件上时,光敏元件会根据光线强度产生相应的电信号。因此,光电传感器主要用于检测可见光的存在、测量光的强度和辨别颜色等。[/color][/font][font=宋体][color=#1E1F24]红外传感器则使用红外线来探测目标物体。红外线是一种波长在红色光和微波之间的电磁波,具有穿云透雾的能力。红外传感器通常使用热敏元件来探测目标物体发出的红外辐射,并根据目标物体的温度差异来判断是否存在目标物体。因此,红外传感器主要用于热成像、夜视、监控、消防等领域。[/color][/font][align=center][img=光电液位传感器,600,324]https://ng1.17img.cn/bbsfiles/images/2023/11/202311091558166644_7199_4008598_3.jpg!w600x324.jpg[/img][/align][font=宋体][color=#1E1F24]光电传感器和红外传感器在结构、性能和应用方面也存在差异。光电传感器的结构相对简单,通常由一个光敏元件和一些电子元件组成。而红外传感器的结构较为复杂,通常需要使用光学系统、热敏元件和信号处理电路等。光电传感器的响应速度较快,适用于高速检测和自动化控制等领域,而红外传感器的响应速度较慢,但具有较高的灵敏度和分辨率,适用于远距离探测和热成像等领域。[/color][/font][font=宋体][color=#1E1F24][url=https://www.eptsz.com]光电传感器[/url]和红外传感器是两种不同的传感器类型,它们的工作原理、结构、性能和应用等方面存在明显的差异。在选择使用时,需要根据实际需求和应用场景来选择合适的传感器类型。[/color][/font]
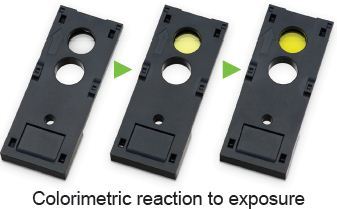
我买了几个热释电传感器和红外灯泡 组装成了自己的红外传感器探头但是现在遇到麻烦了:显示浓度老是下降,不知道什么原因ps:原理是基于lamber-bill吸收定律,用到ndir(非色散红外)的原理(原理见附件)我做过很多次试验 ,因为传感器电路部分别人做的,买别人的探头安装的时候 没有下降的迹象 但是用我做的探头的时候 就会下降。肯求大家来讨论讨论[img]http://www.instrument.com.cn/bbs/images/affix.gif[/img][url=http://www.instrument.com.cn/bbs/download.asp?ID=59230]电调制非分光红外气体传感器[/url]










 我要推广仪器
我要推广仪器
 下载APP
下载APP