推荐厂家
暂无
暂无
 银牌9年
银牌9年
 400-860-5168转2464
400-860-5168转2464
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-860-5168转2459
留言咨询
400-860-5168转2459
留言咨询
 留言咨询
留言咨询




ARC功率因数自动补偿控制仪的原理及其应用安科瑞 蔡昀羲摘 要:介绍了基于ATMEGA16的高精度低压无功功率补偿器。该控制器采用数字检测电路来获取电网电压与电流的相位差,从无功补偿的原理出发,设计控制器的软硬件。使该系统在应用中实现了对电网功率因数的及时补偿和实时监测,适用于目前企业用户进行无功功率补偿。关键词:功率因数;无功补偿;单片机 随着现代工业的发展,电网中使用的感性负载也愈来愈多,如感应式电动机、变压器等。这些设备在工作时不但要消耗有功功率,同时需要电网向其提供相应的无功功率,造成电网的功率因数偏低。在电网中并联电容器可以减少电网向感性负载提供的无功功率,从而降低输电线路因输送无功功率造成的输电损耗,改善电网的运行条件,因此功率因数补偿控制器一直有着广阔的应用市场。本文所介绍的功率因数补偿控制器符合JB/T9663-1999国家标准,主要功能有: (1) 相序自动识别 (2) 电压、电流、功率因数采样与显示 (3) 过压解除、欠流封锁,从而保护电容器及避免循环投切 (4) 采用先投入的先切除,先切除的先投入的原则,对补偿电容实行循环投切 (5) 所有的工作参数都可以通过面板按键设定,包括投入门限、切除门限、过压保护门限、欠电流封锁门限、投切延时时间一、 工作原理 采样三相电源中一线电流(如A线)与另外两线的电压(如BC线)之间的相位差,通过一定的运算,得到当前电网的实时功率因数。此功率因数与设定的投入门限和切除门限比较,在整个投切延时时间内,若在投切门限以内,则不予动作;若小于投入门限,则另投入一组电容器;若大于切除门限或发现功率因数为负时,则切除一组已投入的电容器。再经过投切延时时间,重复比较与投切,直到当前的功率因数达到投切门限以内。在投切过程中,若发现检测到的电压大于设定的过压保护门限,则按组切除所有已投入的电容;当检测到的电压超过设定的过压保护门限的10%时,则一次性切除所有已投入的电容,用以保护电容器。在投切时若发现检测到的电流小于欠电流封锁门限,则停止投切动作,避免系统出现循环投切现象。 由于在三相供电中有不同接线方法,不同的接线方法对功率因数的算法也不一样,因此我们规定ARC系列功率因数自动补偿控制仪的电流取自三相供电中的A线,电压取自BC间的线电压,同时为减少现场接线的复杂度,我们在程序中对相位进行自动判别。 在三相供电中,我们假设三相的相电压分别为Ua、Ub、Uc,A线电流为Ia 则有Ua=Usin(ωt),Ub=Usin(ωt+120º),Uc=Usin(ωt+240º), 从而得到BC间的线电压为Ubc=Ub-Uc= Usin(ωt-90º) 若A线负载为纯阻性,则A线电流Ia与A线电压Ua同相,Ia超前Ubc的角度为90º; 若A线负载为感性,则A线电流Ia滞后A线电压Ua角度为φ(0º≤φ≤90º),Ia超前Ubc的角度为90º-φ; 若A线负载为容性,则A线电流Ia超前A线电压Ua角度为φ(0º≤φ≤90º),Ia超前Ubc的角度为90º+φ 在我们的ARC功率因数自动补偿控制仪中,为了计算的方便,我们电流相位的采样为电压采样的第二个周期,即若没有相位差Ia滞后Ua的角度为360º。在实际检测中,假设我们检测到Ia滞后Ubc的角度为α,根据以上的分析得知: 若180ºα270º,则电路为容性负载,COSφ=COS(270º-α) 若α=270º,则电路为感性负载,COSφ=1 若270ºα360º,则电路为感性负载COSφ=COS(α-270º) 为方便用户接线,若用户将电压Ubc接成了Ucb,或将Ia的输入接反,根据以上的推断,我们同样可得到: 若0ºα90º,则电路为容性负载,COSφ=COS(90º-α) 若α=90º,则电路为感性负载,COSφ=1 若90ºα180º,则电路为感性负载COSφ=COS(α-90º)http://www.acrel.cn/cn/download/common/upload/2011/02/25/16149c0.jpg图1 电压、电流向量二、 硬件的设计 控制器的CPU采用ATMEL的ATMEGA16-8L,此单片机工作电压范围宽(2.7 - 5.5V),最高工作频率为8MHz;芯片内部具有16k字节的Flash程序程序存储器,512 字节的EEPROM,1K字节的片内SRAM;8路10 位ADC;一个可编程的串行USART,具有独立片内振荡器的可编程看门狗定时器;两个具有独立预分频器和比较器功能的8 位定时器/ 计数器 ;一个具有预分频器、比较功能和捕捉功能的16 位定时器/ 计数器。显示芯片采用南京沁恒公司生产的键盘、显示专用芯片CH451S,CH451S最大能驱动8为数码管,且不需外加驱动就能直接驱动LED数码管,大大减小了印板尺寸,单片机的采用SPI模式,只需3线(片选CS、时钟CLK、数据输入DIN),因本系统未用CH451S的键盘功能,所以CH451S的DOUT引脚不用。Ubc的电压信号经过电阻限流进入2mA/2mA的隔离变换器后分为两路,一路进入模拟绝对值处理电路送入单片机的A/D转换口ADC0,作为电压显示信号,另一路经过零比较后进入单片机中断口INT0;同样Ia的电流信号经5A/5mA的隔离变换器后分为两路,一路进入模拟绝对值处理电路送入单片机的A/D转换口ADC1,作为电流显示信号,另一路经过零比较后进入单片机定时器门控端ICP引脚。http://www.acrel.cn/cn/download/common/upload/2011/02/25/1626rm.jpg图2 ATMEGA16外部引脚 http://www.acrel.cn/cn/download/common/upload/2011/02/25/16215ld.jpg图3 输入信号处理三、 软件的设计 因整个系统对电压、电流采样的精度要求不高,我们直接用CPU的10位A/D对电压、电流的信号进行A/D转换,转换的结果一方面供显示的需要,另一方面作为过压与欠流的比较信号。我们将INT0设置为上升沿产生异步中断,ICP设置为上升沿触发输入捕捉。当INT0产生中断时,16位计数器开始以内部恒定的频率开始计数,直到下一中断的产生。在计数的同时,当TCP上有上升沿脉冲时,即将16位计数器已计得的数据放入到捕捉寄存器中。当一个采样周期结束时,计数器中得数据(N)即为外部交流信号的一个周期基数, 捕捉寄存器中数据(n)电流Ia滞后电压Ubc的基数,将(n/N)*360º即为角度,根据上面的原理就可判断在同一周波中时电压超前电流还是电流超前电压,同时还可得出超前或滞后的角度,将此数据进行查表即可得到功率因数。 为了避免对电容器组中的某一组进行频繁的投切,平衡每一组电容器的工作时间,延长整个系统的使用寿命。我们对电容器的投切采用先投入的优先切除,先切除的优先投入的原则,我们在单片机的RAM中开辟了一空间,用于记录每组电容器的投入与切除时间,然后进行排序,将已工作时间最长的作为优先切除对象,将切除时间最长的作为优先投入对象。 当三相交流的负载回路电流非常小时,会产生投切振荡的现象。也就是说控制系统投入一组电容器会产生过投,切除一组电容器又会产生投入不足,控制器就会产生重复的投切现象。为避免此想象的发生,我们设置了欠电流锁定,当电流值小于此数值时,系统将停止对电容器的投切动作,维持已投入的电容器工作。 在工作过程中,若采样到的电压数据大于设定的过压保护值时,控制器将逐步切除已投入的电容器,若发现超过设定的保护值的10%时,则一次性切除所有已投入的电容器,保护电容器。 以上的技术现已应用于本公司的ARC功率因数自动补偿控制仪中,经测试运行,系统工作稳定、各项指标达到了国家标准的要求,现已初步投放市场。
摘 要:介绍了基于ATMEGA16的高精度低压无功功率补偿器。该控制器采用数字检测电路来获取电网电压与电流的相位差,从无功补偿的原理出发,设计控制器的软硬件。使该系统在应用中实现了对电网功率因数的及时补偿和实时监测,适用于目前企业用户进行无功功率补偿。Abetted:This article introduces reactive power compensator based on ATMEGA16 controlling with high precision. It measures excess phase of voltage and current by using digital circuit, Based on the reactive compensation theorem, The software and hardware of the controller is deigned.By using the system a timely compensation and real-time monitnring of the power factor in electricity network are possible, It is mainly used to compensate reactive power in present factories and mines.关键词:功率因数;无功补偿;单片机 随着现代工业的发展,电网中使用的感性负载也愈来愈多,如感应式电动机、变压器等。这些设备在工作时不但要消耗有功功率,同时需要电网向其提供相应的无功功率,造成电网的功率因数偏低。在电网中并联电容器可以减少电网向感性负载提供的无功功率,从而降低输电线路因输送无功功率造成的输电损耗,改善电网的运行条件,因此功率因数补偿控制器一直有着广阔的应用市场。本文所介绍的功率因数补偿控制器符合JB/T9663-1999国家标准,主要功能有: (1) 相序自动识别 (2) 电压、电流、功率因数采样与显示 (3) 过压解除、欠流封锁,从而保护电容器及避免循环投切 (4) 采用先投入的先切除,先切除的先投入的原则,对补偿电容实行循环投切 (5) 所有的工作参数都可以通过面板按键设定,包括投入门限、切除门限、过压保护门限、欠电流封锁门限、投切延时时间一、 工作原理 采样三相电源中一线电流(如A线)与另外两线的电压(如BC线)之间的相位差,通过一定的运算,得到当前电网的实时功率因数。此功率因数与设定的投入门限和切除门限比较,在整个投切延时时间内,若在投切门限以内,则不予动作;若小于投入门限,则另投入一组电容器;若大于切除门限或发现功率因数为负时,则切除一组已投入的电容器。再经过投切延时时间,重复比较与投切,直到当前的功率因数达到投切门限以内。在投切过程中,若发现检测到的电压大于设定的过压保护门限,则按组切除所有已投入的电容;当检测到的电压超过设定的过压保护门限的10%时,则一次性切除所有已投入的电容,用以保护电容器。在投切时若发现检测到的电流小于欠电流封锁门限,则停止投切动作,避免系统出现循环投切现象。 由于在三相供电中有不同接线方法,不同的接线方法对功率因数的算法也不一样,因此我们规定ARC系列功率因数自动补偿控制仪的电流取自三相供电中的A线,电压取自BC间的线电压,同时为减少现场接线的复杂度,我们在程序中对相位进行自动判别。 在三相供电中,我们假设三相的相电压分别为Ua、Ub、Uc,A线电流为Ia 则有Ua=Usin(ωt),Ub=Usin(ωt+120º),Uc=Usin(ωt+240º), 从而得到BC间的线电压为Ubc=Ub-Uc= Usin(ωt-90º) 若A线负载为纯阻性,则A线电流Ia与A线电压Ua同相,Ia超前Ubc的角度为90º; 若A线负载为感性,则A线电流Ia滞后A线电压Ua角度为φ(0º≤φ≤90º),Ia超前Ubc的角度为90º-φ; 若A线负载为容性,则A线电流Ia超前A线电压Ua角度为φ(0º≤φ≤90º),Ia超前Ubc的角度为90º+φ 在我们的ARC功率因数自动补偿控制仪中,为了计算的方便,我们电流相位的采样为电压采样的第二个周期,即若没有相位差Ia滞后Ua的角度为360º。在实际检测中,假设我们检测到Ia滞后Ubc的角度为α,根据以上的分析得知: 若180ºα270º,则电路为容性负载,COSφ=COS(270º-α) 若α=270º,则电路为感性负载,COSφ=1 若270ºα360º,则电路为感性负载COSφ=COS(α-270º) 为方便用户接线,若用户将电压Ubc接成了Ucb,或将Ia的输入接反,根据以上的推断,我们同样可得到: 若0ºα90º,则电路为容性负载,COSφ=COS(90º-α) 若α=90º,则电路为感性负载,COSφ=1 若90ºα180º,则电路为感性负载COSφ=COS(α-90º)二、 硬件的设计 控制器的CPU采用ATMEL的ATMEGA16-8L,此单片机工作电压范围宽(2.7 - 5.5V),最高工作频率为8MHz;芯片内部具有16k字节的Flash程序程序存储器,512 字节的EEPROM,1K字节的片内SRAM;8路10 位ADC;一个可编程的串行USART,具有独立片内振荡器的可编程看门狗定时器;两个具有独立预分频器和比较器功能的8 位定时器/ 计数器 ;一个具有预分频器、比较功能和捕捉功能的16 位定时器/ 计数器。显示芯片采用南京沁恒公司生产的键盘、显示专用芯片CH451S,CH451S最大能驱动8为数码管,且不需外加驱动就能直接驱动LED数码管,大大减小了印板尺寸,单片机的采用SPI模式,只需3线(片选CS、时钟CLK、数据输入DIN),因本系统未用CH451S的键盘功能,所以CH451S的DOUT引脚不用。Ubc的电压信号经过电阻限流进入2mA/2mA的隔离变换器后分为两路,一路进入模拟绝对值处理电路送入单片机的A/D转换口ADC0,作为电压显示信号,另一路经过零比较后进入单片机中断口INT0;同样Ia的电流信号经5A/5mA的隔离变换器后分为两路,一路进入模拟绝对值处理电路送入单片机的A/D转换口ADC1,作为电流显示信号,另一路经过零比较后进入单片机定时器门控端ICP引脚。三、 软件的设计 因整个系统对电压、电流采样的精度要求不高,我们直接用CPU的10位A/D对电压、电流的信号进行A/D转换,转换的结果一方面供显示的需要,另一方面作为过压与欠流的比较信号。我们将INT0设置为上升沿产生异步中断,ICP设置为上升沿触发输入捕捉。当INT0产生中断时,16位计数器开始以内部恒定的频率开始计数,直到下一中断的产生。在计数的同时,当TCP上有上升沿脉冲时,即将16位计数器已计得的数据放入到捕捉寄存器中。当一个采样周期结束时,计数器中得数据(N)即为外部交流信号的一个周期基数, 捕捉寄存器中数据(n)电流Ia滞后电压Ubc的基数,将(n/N)*360º即为角度,根据上面的原理就可判断在同一周波中时电压超前电流还是电流超前电压,同时还可得出超前或滞后的角度,将此数据进行查表即可得到功率因数。 为了避免对电容器组中的某一组进行频繁的投切,平衡每一组电容器的工作时间,延长整个系统的使用寿命。我们对电容器的投切采用先投入的优先切除,先切除的优先投入的原则,我们在单片机的RAM中开辟了一空间,用于记录每组电容器的投入与切除时间,然后进行排序,将已工作时间最长的作为优先切除对象,将切除时间最长的作为优先投入对象。 当三相交流的负载回路电流非常小时,会产生投切振荡的现象。也就是说控制系统投入一组电容器会产生过投,切除一组电容器又会产生投入不足,控制器就会产生重复的投切现象。为避免此想象的发生,我们设置了欠电流锁定,当电流值小于此数值时,系统将停止对电容器的投切动作,维持已投入的电容器工作。 在工作过程中,若采样到的电压数据大于设定的过压保护值时,控制器将逐步切除已投入的电容器,若发现超过设定的保护值的10%时,则一次性切除所有已投入的电容器,保护电容器。 以上的技术现已应用于本公司的ARC功率因数自动补偿控制仪中,经测试运行,系统工作稳定、各项指标达到了国家标准的要求,现已初步投放市场。

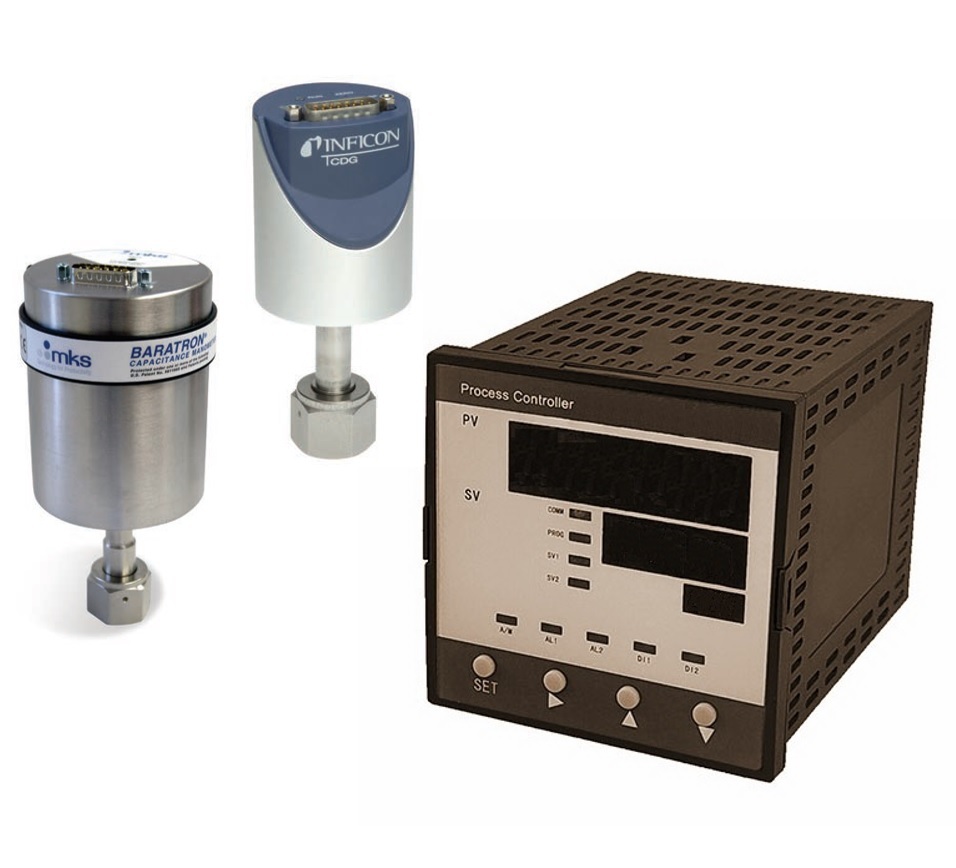
[color=#990000]摘要:本文将针对上述防护热板法计量单元电功率精密控制中存在的问题,进行详细分析,并提出相应的解决方案。解决方案的基本内容是升级换代现有的工业用PID控制器,将PID控制器的模数转换(A/D)精度提高到24位,数模转换(D/A)精度提高到16位,增加浮点运算位数并将最小控制输出百分比(OP)提高到0.01%。通过此新一代工业用双通道超高精度PID控制器,可轻松将防护热板法计量单元电功率的准确度控制在0.1%以内,第二通道可以用于护热单元或冷板的温度跟踪和控制。同时,新一代PID控制器还保留了工业用PID控制器的常用规格尺寸,并具有很好的性价比。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px]一、问题的提出[/size]在稳态法防护热板法导热系数测试过程中,要求在稳定状态下对加载在计量加热器上的电功率进行准确测量。在标准测试方法GB/T 10294中的具体规定是“测量施加于计量部分的平均电功率,准确度不低于0.2%,强烈建议使用直流电。推荐自动稳压的输入功率,输入功率的随机波动、变化引起的热板表面温度波动或变化应小于热板和冷板间温差的0.3%。由此可见,防护热板法导热仪计量单元上直流电功率的加载、控制和测量是保证导热系数测量准确性的关键因素之一。除了平均电功率准确度不低于0.2%之外,对于一般冷热板之间20℃温差的导热系数测试,热板表面温度波动或变化还应小于20℃×0.3%=0.06℃。为了满足稳态法防护热板法上述要求,多年来普遍采用的技术手段是采用直流恒流电源,即在计量加热器上施加高精度恒定的直流电流。尽管加载恒定直流电流可以达到标准方法的规定,但同时存在并带来一系列其他问题:(1)热板温度无法实现10的整数倍温度精确控制。(2)热板温度达到稳定时间长。(3)现有工业用PID控制仪表无法达到电功率准确度要求。(4)采用高精度数字电压表和源表,并结合计算机软件进行电功率的PID控制,虽然完全可以解决上述问题,但整体造价十分昂贵。本文将针对上述防护热板法计量单元电功率精密控制中存在的问题,进行详细分析,并提出相应的解决方案。解决方案的核心内容是升级换代现有的工业用PID控制器,将PID控制器的模数转换(A/D)精度提高到24位,数模转换(D/A)精度提高到16位,增加浮点运算位数并将最小控制输出百分比(OP)提高到0.01%。通过此新一代工业用双通道超高精度PID控制器,可轻松将防护热板法计量单元电功率的准确度控制在0.1%以内,第二通道可以用于护热单元或冷板的温度跟踪和控制。同时,新一代PID控制器还保留了工业用PID控制器的常用规格尺寸,并具有很好的性价比。[size=18px][color=#990000]二、计量单元电加热功率和温度精密控制问题分析[/color][/size]在现有的防护热板法计量单元电加热功率和温度精密控制中,存在着以下几方面的矛盾。下文将对这些矛盾进行分析,并由此便于提出相应的解决方案。[size=16px][color=#990000]2.1 热板加热功率精度与整10℃倍数设定温度控制的矛盾[/color][/size]在许多防护热板法导热仪中,为了满足测试方法对施加在计量单元上的加热电功率准确度要求,往往会按照标准方法推荐而采用高精度直流电源。尽管采用直流电源可保证加热电功率的准确度,但在实际测试过程中则还需凭借测试数据积累和经验总结,才能确定出不同热板温度所对应的一系列不同的加载电流值。这种加热电流直接加载方式尽管能保证电功率的准确度,但最大的问题是无法将热板温度准确控制在任意所需的设定温度上,如无法准确控制整10℃倍数的设定温度,实际热板温度往往偏离设定温度而呈现为非整数形式。另外,在测试不同导热系数样品时,采用相同加热电流往往会表现出不同的热板温度。直接加载直流电流方式,还存在一个严重问题是升温速度较慢,计量单元达到稳定温度需要漫长时间。特别是对于较大样品尺寸的防护热板法导热仪,相应的计量单元体积和热容都较大,往往需要更长的温度稳定时间。相比于低导热样品的较小热容,计量单元温度稳定所需时间占用了更多的整体达到稳态的时间。由于上述问题的存在,这种直接加载直流电的加热方式很少在商业化导热仪上使用,一般用在早期热导仪和实验室自行搭建的导热系数测试设备上。[size=16px][color=#990000]2.2 现有工业用PID控温仪无法满足准确度要求问题[/color][/size]为了解决上述直接加载直流电流加热方式存在的问题,并同时提高导热仪的自动化水平,目前大多数商业化防护热板法导热仪都采用了PID控温仪技术。采用PID控温技术是将温度传感器、调功器、直流恒流源和PID控制器组成闭环控制回路,通过PID算法将计量单元自动控制在任意设定温度点上。采用PID控制技术,尽量在理论上可以完美的解决早期直接加载直流电流方式存在的问题,但带来的问题则是无法达到测试方法规定的加热电功率准确度要求,也就是使用工业PID控温仪势必要在测量精度上做出牺牲。出现不得不牺牲电功率控制精度的主要原因是目前的工业用PID控温仪存在以下几方面的问题:(1)采集精度不够:PID控制器的模数转换(A/D)精度大多都是8位或12位,极个别能达到16位,这明显不能满足高精度测量要求。(2)控制精度不够:PID控制器的数模转换(D/A)精度大多都是8位或12位,同样不能满足高精度控制要求。(3)浮点运算精度不够:PID控制器内微处理器运算一般都采用单精度浮点运算。对于较低位数的数模转换输出控制,单精度浮点运算已经足够,对应的最小输出百分比为0.1%。但对于防护热板法计量单元电加热功率的高精度控制,0.1%的最小输出百分比显然已经无法满足要求。[size=16px][color=#990000]2.3 能满足准确度要求的专用PID控制设备但造价昂贵问题[/color][/size]为解决上述PID控制中存在的问题,目前比较成熟的技术是采用高精度的专用仪器和仪表,并结合计算机组成超高精度的PID控制系统来实现护热板法计量单元电加热功率的控制,并在任意温度设定上实现超高精度的长时间恒定控制。这种超高精度的PID温度控制系统采用了分体式结构搭建而成,分别采用独立的五位半/六位半的数字电压表和数控直流电源来实现高精度的数据采集和控制输出功能,PID运算处理则采用计算机或微处理器实现双精度浮点运算,并将最小输出功率百分比提高到0.01%甚至更低。通过这种分体式结构的PID温度控制系统,同时完美的解决了上述防护热板法导热仪中计量单元电加热功率和温度的高精度控制问题,同时也可以大幅度缩短测试时间。尽管这种分体结构的PID温度控制系统满足了精密测量的各种技术要求,但同时带来的主要问题是造价太高,同时还需进行编程和复杂的调试,因此这种PID温控系统和控制技术在国内外多用于计量机构和对测量精度有较高要求的研究部门,并不适用于对价格比较敏感的商业化防护热板法导热仪,更不适合工业应用中的普通导热仪使用。[size=18px][color=#990000]三、工业用超高精度PID控制器解决方案[/color][/size]上述保护热板法导热仪计量单元的电加热功率和温度精密控制问题的分析以及相应的技术改进,也是多年来保护热板法导热系数测试技术进步的一个典型过程。从上述分析可以看出,这个测试设备的技术迭代过程显然还未真正达到更理想化的水平。为了既要满足计量单元电加热功率和温度高精度控制要求,又要实现PID控制、运行操作简单化和具有较低的制作成本。我们提出了新的解决方案,即在现有的工业用PID控制器(调节器)技术基础上进行升级,充分发挥工业用PID调节器的运行操作简便、集成化程度高、体积尺寸小安装方便和价格上的优势。核心升级技术的具体内容如下:(1)PID调节器的模数转换(A/D)直接升级到24位,大幅提高采集精度。(2)PID调节器的数模转换(D/A)精度升级到16位,大幅提高控制输出精度。(3)采用双精度浮点运算提高计算精度,并将最小输出百分比降低到0.01%,充分发挥数模转换的16位精度。(4)保持传统工业PID调节器的标准尺寸,如96×96、96×48和48×96规格,而屏幕显示采用真彩色IPS TFT全视角液晶显示,数字全5位显示。(5)全新的PID调节器具有单通道VPC 2021-1和VPC 2021-2两种规格系列,可满足不同变量(如真空、压力、温度和电压等)的高精度调节和控制。升级前后的PID调节器如图1和图2所示。[align=center][color=#990000][img=01.升级前的双通道PID调节器,690,321]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161611027835_9284_3221506_3.jpg!w690x321.jpg[/img][/color][/align][align=center][color=#990000]图1 升级前的双通道PID调节器[/color][/align][align=center][color=#990000][/color][/align][align=center][color=#990000][img=升级后的单通道PID调节器,500,388]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161611255867_7954_3221506_3.jpg!w690x536.jpg[/img][/color][/align][align=center][color=#990000]图2 升级后的单通道PID调节器[/color][/align]综上所述,解决方案通过对模数转换、数模转换、浮点运算精度和最小输出百分比的全面升级,可完美的实现防护热板法计量单元的电加热功率和温度的超高精度控制。同时,这种全新的超高精度工业用PID调节器也可能用于其他参数的精密控制,并具有很好的性价比。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]









 我要推广仪器
我要推广仪器
 下载APP
下载APP