上海微系统所新原理开关器件成果获2022年度中国科学十大进展
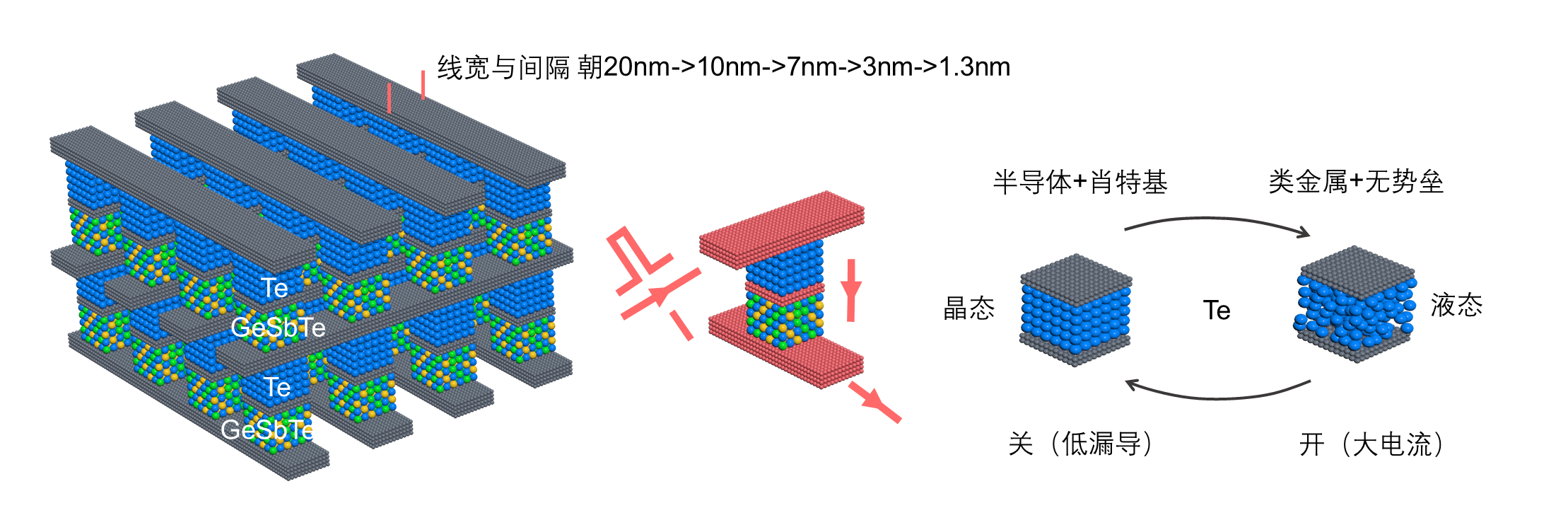
3月17日,科技部高技术研究发展中心(基础研究管理中心)发布2022年度中国科学十大进展。中科院上海微系统所宋志棠、朱敏团队的“新原理开关器件为高性能海量存储提供新方案”脱颖而出,荣获2022年度中国科学十大进展(图1)。中国科学十大进展遴选活动由科技部高技术研究发展中心牵头举办,其遴选程序分为推荐、初选和终选3个环节。终选阶段,中国科学院院士、中国工程院院士、国家重点实验室主任等3500余位知名专家学者对30项候选科学进展进行网上投票,最终,得票数排名前10位的入选。图1 新原理开关器件成果荣获2022年度中国科学十大进展高密度与海量存储是大数据时代信息技术与数字经济发展的关键瓶颈。中国科学院上海微系统与信息技术研究所宋志棠、朱敏团队发明了一种新型基于单质碲和氮化钛电极界面效应的开关器件(图2),充分发挥纳米尺度二维限定性结构中碲熔融—结晶速度快、功耗低的独特优势,“开态”碲处于熔融状态是类金属、和氮化钛电极形成欧姆接触,提供强大的电流驱动能力,“关态”半导体单质碲和氮化钛电极形成肖特基势垒,彻底夹断电流。该晶-液态转变的新型开关器件,组分简单,可克服双向阈值开关(OTS)复杂组分导致成分偏析问题;工艺与CMOS兼容且可极度微缩,易实现海量三维集成;开关综合性能优异,驱动电流达到11 MA/cm2,疲劳108次以上,开关速度~15ns,尤其碲原子不丢失情况下开关寿命可大幅提升。该研究突破为我国发展海量存储和近存计算,在大数据时代参与国际竞争提供了新的技术方案。该成果发表在国际顶尖杂志Science (2021, 374, 1390-1394) 上。图2 新原理开关器件及其晶态-液态新型开关机理(Science, 2021, 374, 1390-1394)中国科学院上海微系统与信息技术研究所是我国著名的技术学科综合性研究所之一,前身是成立于1928年的国立中央研究院工程研究所。上海微系统所现有传感技术、集成电路材料、微系统技术三个国家级重点实验室,有无线传感网与通信、太赫兹固态技术、高端硅基材料三个中科院重点实验室。设有传感技术实验室、纳米材料与器件实验室,太赫兹固态技术实验室、微系统技术实验室、宽带无线通信实验室、硅基材料与集成器件实验室、超导电子学实验室、仿生视觉系统实验室、2020 X-Lab实验室等九个实验室。































 我要推广仪器
我要推广仪器
 下载APP
下载APP