视频号

抖音号

哔哩哔哩号

前沿资讯手机看



分享到微信朋友圈
打开微信,点击底部的“发现”,
使用“扫一扫”即可将网页分享到朋友圈。
如今,LiDAR在自动驾驶辅助系统(ADAS)、无人机、测距、人脸识别、数字相机等领域的应用越来越广泛,也变得越来越重要。现在,让我们回顾一下2019年的一项重要研究。在一项具有前瞻性的合作研究中,爱丁堡大学的Robert K. Henderson教授与STMicroelectronics影像部门合作,推动了基于单光子雪崩二极管(SPAD)的激光雷达(LiDAR)系统的发展,并在汽车应用领域取得了重大突破。他们的研究专注于优化SPAD的配置,以提升汽车LiDAR接收器的设计,并对该领域产生了深远影响。
在Henderson教授的领导下,该团队进行了具有创新性的研究,重新定义了基于SPAD的LiDAR技术的能力。他们的研究成果发表在题为《用于LiDAR接收器验证的可重配置40纳米CMOS SPAD阵列》的关键论文中,对该领域具有重要影响。
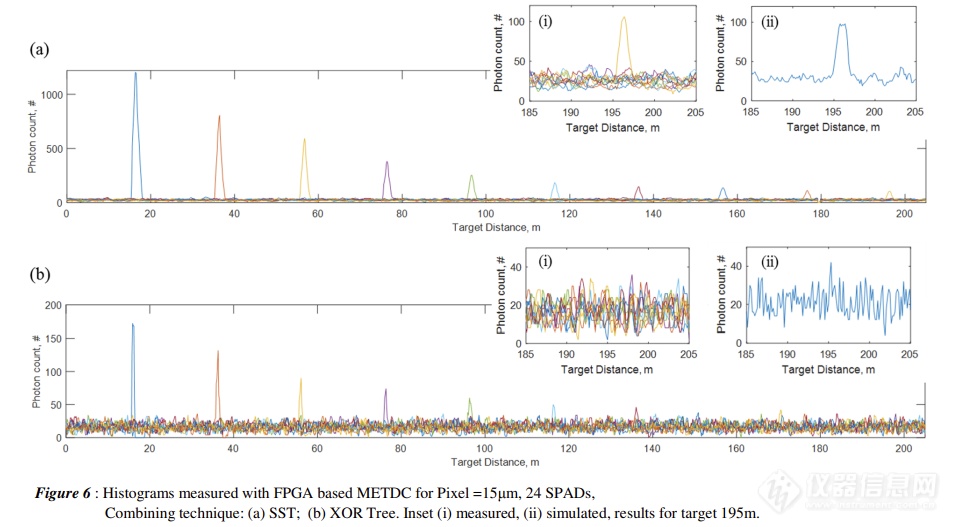
该研究以使用40纳米CMOS技术实现的可重配置SPAD阵列为核心,提供了像素配置的灵活性。该合作开发的测试芯片利用了Xilinx Kintex-7 FPGA进行高效的数据采集,实现了同时读取128个SPAD数字输出。这种能力可记录大量SPAD事件,为进一步分析提供关键数据。
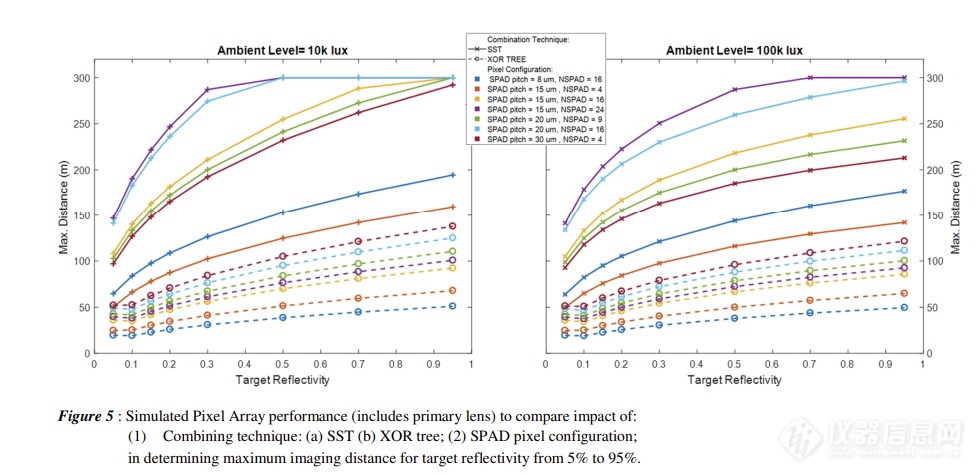
Henderson教授团队的关键突破之一是同步总和技术(SST),旨在优化基于SPAD的LiDAR系统的动态范围。通过有效地组合多个SPAD脉冲,SST技术相较于现有方法实现了显著提升,达到了7.5倍的增强。这一突破为长距离汽车LiDAR应用带来了新的可能性,解决了死时间瘫痪等问题,提高了对近距离高反射目标的检测能力。
为了补充硬件开发,该团队还开发了一种强大的MATLAB模拟模型。该复杂模型通过考虑光子检测概率、像素配置、传感器吞吐量和偏置条件等多种参数,准确模拟了传感器的性能。利用模拟结果,研究人员能够确定不同像素配置下的最大成像距离,为传感器设计提供明智决策。
2019年Henderson教授团队的合作研究是基于SPAD的汽车LiDAR系统领域的一项重大成就。他们的工作提升了LiDAR技术的能力,提供了更好的性能、增强的动态范围和更大的像素配置灵活性。
随着对可靠且具有成本效益的自动驾驶系统需求的持续增长,这项研究的影响力不可低估。Henderson教授的团队与STMicroelectronics的合作为基于SPAD的LiDAR系统的未来突破铺平了道路。他们的发现为研究人员和从业者提供了宝贵见解,指导更高效和先进的自动驾驶技术的开发。
这种合作研究的持久影响凸显了合作和创新在推动技术进步方面的力量。通过结合学术专业知识和行业经验,Henderson教授的团队与STMicroelectronics在基于SPAD的LiDAR系统方面取得了重要进展。可重配置的SPAD阵列,搭配SST技术和MATLAB模拟模型的支持,代表了实现更安全和更高效自动驾驶系统的重要一步。
展望未来,这项合作研究的影响将继续塑造LiDAR系统的未来。这些具有变革性的发现将激发基于SPAD技术的更多进步,推动实现全自动驾驶车辆,并对整个汽车行业产生巨大的影响。






[来源:光焱科技股份有限公司]

2024.06.21
AFM. 华中科大韩宏伟与港中大路新慧团队 p-MPSCs优化研究
2024.05.30

2024.04.10

2024.04.09
2024.04.03

钙钛矿太阳能电池研究的前8种需要仪器:在科学期刊上发表文章的全面指南(上)
2024.03.13
品牌合作伙伴






























版权与免责声明:
① 凡本网注明"来源:仪器信息网"的所有作品,版权均属于仪器信息网,未经本网授权不得转载、摘编或利用其它方式使用。已获本网授权的作品,应在授权范围内使用,并注明"来源:仪器信息网"。违者本网将追究相关法律责任。
② 本网凡注明"来源:xxx(非本网)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。如其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
③ 如涉及作品内容、版权等问题,请在作品发表之日起两周内与本网联系,否则视为默认仪器信息网有权转载。
![]() 谢谢您的赞赏,您的鼓励是我前进的动力~
谢谢您的赞赏,您的鼓励是我前进的动力~
打赏失败了~
评论成功+4积分
评论成功,积分获取达到限制
![]() 投票成功~
投票成功~
投票失败了~