视频号

抖音号

哔哩哔哩号

前沿资讯手机看



分享到微信朋友圈
打开微信,点击底部的“发现”,
使用“扫一扫”即可将网页分享到朋友圈。
1.引言
在研究晶体振荡器和原子钟的稳定性时,人们发现这些系统的相位噪声中不仅有白噪声,而且有闪烁噪声。使用传统的统计工具(例如标准差)分析这类噪声时统计结果是无法收敛的。为了解决这个问题,David Allan于1966年提出了Allan方差分析,该方法不仅可以准确识别噪声类型,还能精确确定噪声的特性参数,其最大优点在于对各类噪声的幂律谱项都是收敛的。该方法最初被用于分析晶振或原子钟的相位和频率不稳定性,比如,晶振的中心频率均采用Allan方差来表征时域内的稳定度。由于高端陀螺,气体传感等各类物理量测仪器本身也具有晶振的特征,因此该方法随后被广泛应用于各种物理传感器的随机误差辨识中。
Allan方差允许你查看一段时间内信号中的噪声。通常,Allan方差的值显示在对数——对数图上。你之前可能已经看过这些图,并且可能有以下问题:
• Allan方差图是如何制作的?
• 这些图如何帮助我在产品之间进行选择?
• 这些图在我使用产品时有什么作用?
这些是本文即将涵盖的主题。
Allan方差是量化噪声的一种常用方法,尤其适合于鉴别测量数据中不同类型的噪声。分析实际测量获取的“信号”,并将数据中的噪声和系统漂移分开,这是一个复杂且通常由开发者自定义的过程。Allan方差图给出了在给定理想条件下,经过噪声校正的系统可以达到什么样的表现,是衡量系统稳定性的指标。
下文中,我们首先将从整体上介绍传感器噪声的基础知识。有了噪声知识,我们将讨论Allan方差图的含义,帮助你在购买产品中使用这些数据进行决策以及在使用产品时校正传感器的噪声。
2.信号,噪声和数据
让我们以一个例子开始:有一个传感器——可以是加速度计,温度传感器或光传感器等——每秒可以进行多次测量,测量频率即为采样率。测量获取的数据流是我们的“信号”。信号中的每个数据点都是在实际环境中的测量值,噪声,干扰,漂移,偏置等的组合。如果我们仅通过观察信号中的一个数据点,而不知道其他点或者对传感器其他信息有任何了解,我们绝对无法知道这个信号的哪一部分是噪声,哪一部分是实际信号。
2.1.噪声
噪声具有一个普遍的特征:在足够长的时间内,噪声的平均趋近于零。
这只是一个纯粹的定义,但将对我们的分析很有帮助。如果这个定义不正确,则信号中不趋近于零的部分就不是“噪声”,而是其他的东西。可能是某种干扰,可能是传感器的偏移量,甚至,可能就是你要测量的数据!信号中不是噪声又不是实际数据的部分通常称为“错误”。在现实世界中的数据流(即信号)中,所有这些因素和其他因素共同构成了传感器输出的值。以加速度计为示例:
如果一个加速度计的噪声水平为10mg(注意这里g是重力加速度)。假设我们从加速度计上读取了“ 1.052g”,得到了一个数据点。让我们进一步假设(并且非常不正确),数据组成部分是:
• 真实数据
• 噪声
即使这样,我们也无法使用单个数据点来很好地校正噪声。首先,噪声水平通常是“最大”噪声。这意味着噪声将偏离实际数据值约0.01g,但其幅度也可能更小。即使我们假设噪声始终为0.01g,该特定数据点上的噪声是叠加还是降低?换句话说,我们的测量值实际上是1.062还是1.042?没有办法知道。
为此我们需要更多的数据。让我们继续看下一个数据点,假设是1.059,下下一个是1.061,然后是1.057。我们似乎正在接近答案,这也印证了为什么平均噪声为零的定义实际上符合你的直觉。你现在可能会说:只要获得足够的数据并将其平均,并且如果加速度计没有移动,那么该平均值将非常非常接近正确的答案。这就是我们可以使用的噪声方法:随时间平均,最终根据噪声的本质将噪声平均为零,真正的信号就会“水落石出”。请留意“平均时间”的概念,后面我们会用得到。
2.2测量噪声
那么,我们如何获得非常非常准确的测量结果呢?我们需要获得很多的数据点。这些数据点仅用于一次平均。就加速度计而言,它不应该移动。为此我们将加速度计固定在稳定的桌子上,然后开始记录它输出的数据。这种设置可以使我们从地球引力场中获得几乎恒定的加速度(可以想像一些等效的设置,如温度传感器周边的温度恒定,光传感器的光通量恒定,尽管重力相对容易保持恒定)。经过很多这样的假设——我们获得大约是250万个数据——如果绘制一个没有沿着重力方向的轴(例如通常是X或Y),则数据可能如下所示:
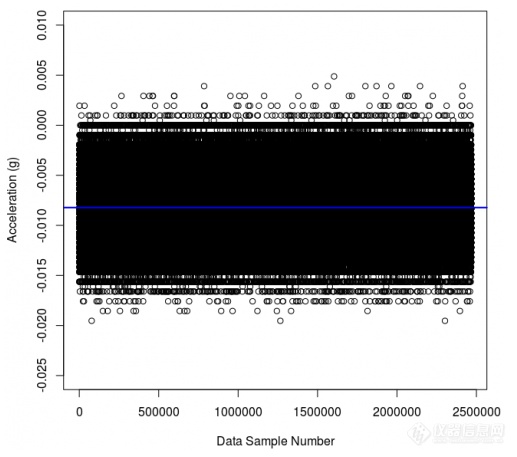
如果将所有这些值取平均值,我们将得到沿蓝线的值。它非常接近零,为-0.008。这里可能涉及到准确性的问题(我们将在今后的文章中介绍有关准确性Accuracy和分辨率Resolution的定义和应用)。但是由于该传感器已经过校准,因此上述偏差的原因更可能是由于加速度计相对于地球重力矢量略有倾斜引起的,这会导致加速度在X或Y方向上存在一定的分量。
该传感器的噪声水平为10 mg,实际上你可以看到几乎所有的偏差都包含在蓝色平均线两侧的0.01g以内。
但是,你可能会想:这种分析仅在我们不想测量任何变化的数据时才会有效。因为你买加速度计可不只是为了测重力,你实际上希望它能够移动——在真实应用环境中测量加速度随时间的变化。为此,我们需要表征噪声随时间变化的情况,因此需要找出能够校正噪声之前,要采集数据的时间长度。
3.Allan方差
表征任何传感器性能的一种方法是测量该传感器随时间变化的程度。诀窍就是——你可以测量出方差变化的程度。下面我们仍然用上面的数据举例子,有了这些数据,我们可以找到测量噪声实际效果的方法,以及噪声随测量时间长短的变化特点。
对于许多传感器而言,存在一段理想的时间长度,在该时间长度上取平均值(或其他统计参数)可以获得噪声的最小值(至少对于某些类型的噪声)。以上面的250万个点为例,我们可以问一个问题:要以较高的信噪比达到-0.008的期望值,我们需要至少平均多少个点?这是一个很好的问题,但不幸的是,对于所获 取的数据集,直到获得很多数据点之后,我们才知道-0.008这个“答案”。
所以我们使用另一种测量噪声的方法,即方差。简而言之,这个量表征数据集离散的程度。一组数字(1、2、10)的方差小于一组(1、2、100)。要了解为何方差对我们有帮助,请想象将250万个数据点分成两半。平均前一半数据,你会得到什么值?大概是-0.008。现在平均后一半数据。又得到什么值?同样的,可能为-0.008。因此,上半部平均值(-0.008)和下半部平均值(-0.008)之间的差异实际上为零。
现在,我们将每个单独的数据点视为一个“组”,而不是由125万个点组成的两组。也就是说,我们现在有250万个“组”。在这种情况下,我们做同样的事情——“平均”每个组(在这种情况下,每“组”只有一个数据),然后检查所有组平均值之间的方差。当将每个单独的点视为一个“组”时,组平均值的方差就等于传感器在以每个点的平均时间为间隔时的噪声。以上述传感器为例,两侧的平均值大约为0.01g(总计0.02g)。
因此,在这两种极端之间(125万个点组和单点组),存在“信噪比最强点或最高灵敏度点”。这个平衡点是我们需要收集的最少的“组”点数,可以最大程度地减少组平均值的方差(即,使每个组真正非常接近-0.008),但又不会太小,以至于组平均值像每个数据点为一组那样剧烈地波动。寻找Allan方差最小值,就是找到这个平衡点。
为此,我们不仅要有一个或125万个小组,而且要尝试所有组的规模。因此,我们可以遍历整个数据集,并将其分成由2个数据点构成的组,然后分别平均。然后以3,4,5 .... 10 .... 100 .... 1000等个数据点为组,分别进行平均。最后我们找到所有大小相等的数据组之间的方差。随着数据组变得越来越长,不同数据组之间的平均值会越来越接近,因为每个数据组的平均值会越来越接近“真实”的平均值。
3.1.计算
幸运的是,网上已经有很多程序可以让我们做Allan方差计算。其文档和资源可在线获得。我们利用这些程序可得到如下图:
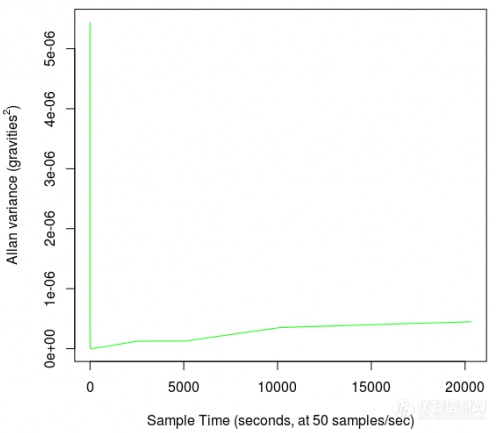
该图显示了我们期望的结果(即,确实存在一个非常明显的点,对足够大的一组数据求平均会使噪声水平比数据数量较少的组小)。但是,这个图并不是非常有用,有两个原因:
• 这种变化过于剧烈,以至于很难说出理想的组数是多少
• 方差的单位是传感器值的平方,而“加速度平方”不是一个很直观的单位
还有一个奇怪的事实是,方差在下降之后会再次上升,我们稍后再来讨论这点。
3.2.对数——对数图
不过,我们可以通过将数据放在对数——对数图上来解决第一个问题。下降之所以如此急剧,是因为方差在较短的横轴区间内下降了几个数量级。因此,对数——对数图将给较小的数字更大的权重,并加重变化。我们可以使用Origin或者Matlab将上述数据重新作图,将横轴和纵轴都更改成对数坐标,从而得到如下图:
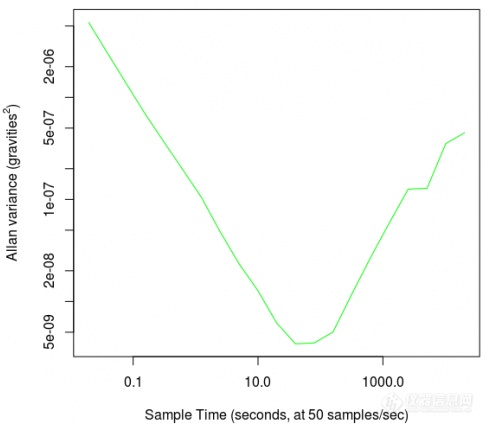
现在,数量级的大幅度下降显示为一条优美的倾斜线,其最小值在100秒附近清晰可见(在对数——对数图上介于10到1000之间)。以每秒50个数据点的速度进行采样,这意味着当数组的数据个数为50 x 100 = 5,000个时,所获得的方差降至最小。
在第一个线性图中方差的平方增加对应对数——对数图中的显著转折。即使在线性图上,也可以清楚看到与初始的噪声降低相比,噪声也只是略有上升的趋势。
[来源:宁波海尔欣光电科技有限公司]
 如何测量绝对反射与相对反射?
如何测量绝对反射与相对反射?
2024.07.22

2024.07.16


推动设备更新与消费品以旧换新:精密生态气体监测仪器助力绿色未来
2024.07.12

2024.07.11

2024.06.24
品牌合作伙伴






























版权与免责声明:
① 凡本网注明"来源:仪器信息网"的所有作品,版权均属于仪器信息网,未经本网授权不得转载、摘编或利用其它方式使用。已获本网授权的作品,应在授权范围内使用,并注明"来源:仪器信息网"。违者本网将追究相关法律责任。
② 本网凡注明"来源:xxx(非本网)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。如其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
③ 如涉及作品内容、版权等问题,请在作品发表之日起两周内与本网联系,否则视为默认仪器信息网有权转载。
![]() 谢谢您的赞赏,您的鼓励是我前进的动力~
谢谢您的赞赏,您的鼓励是我前进的动力~
打赏失败了~
评论成功+4积分
评论成功,积分获取达到限制
![]() 投票成功~
投票成功~
投票失败了~