
 关注
关注
已关注
![]() 已认证
已认证
粉丝量 0
400-860-5168转4666
仪器信息网认证电话,请放心拨打
香港中文大学张立教授课题组《Advanced Materials》:软体机器人平台用于复杂生物运动的解耦和重编程

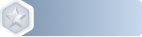
由于自然界中生命的演变,生物往往表现出对复杂环境的高度适应性,例如超快运动、伪装和群体合作。生物运动的研究对仿生机器人以及医疗设备构建等工程领域具有重要启示作用。基于此,人们致力于开发新的仿真工具、物理模型和实验平台来模拟和研究这些自然运动模式。然而,许多不同尺度的生物表现出非常复杂的运动步态,例如多种基本运动的耦合。这些步态难以用现有的软体机器人平台模拟,而且这些平台通常缺乏解耦复杂生物行为的策略,使得理解生物运动的机制具有挑战性。 近日,香港中文大学张立教授课题组联合北京计算科学研究中心丁阳教授课题组以及美国卡耐基梅隆大学Carmel Majidi教授课题组提出一种磁性软体机器人平台用于重建和解耦复杂生物运动。该磁性软体机器人可以通过模板法或者3D打印工艺制造。该工作中使用了面投影微立体光刻技术(nanoArch S130, 摩方精密)打印一种节肢型的水凝胶磁性机器人,机器人身体由磁性段(由掺杂磁性颗粒的聚丙烯酰胺水凝胶制成)和非磁性段(由聚丙烯酰胺水凝胶制成)组成。机器人的尺寸为长度5 mm、长宽比11:1。采用时变磁场来诱导软体机器人的敏捷运动。通过该软体机器人平台以及可编程的磁场输入,该研究团队可以重建出摇蚊的幼虫所启发的运动步态并对这类型的生物运动步态进行系统的解耦研究。相关研究成果以“Decoupling and reprogramming the wiggling motion of midge larvae using a soft robotic platform” 为题发表于国际著名期刊《Advanced Materials》。
通过构建的磁性软体机器人系统,该研究团队揭示了机器人身体卷曲和旋转的相互耦合在其推进中起着关键作用,以这种仿生推进方式游动可以诱导与自然生物一致的流场结构,并在中等雷诺数状态下实现优异的运动性能。此外,磁性软体机器人能够在流动的环境中逆流而行,通过切换其运动模式来适应三维环境,以及实现其他功能,包括越障能力和在狭窄空间中的运动能力。与通过磁场梯度直接将机器人驱动到指定位置的磁力控制策略相比,软体机器人可以灵巧地控制其变形和运动模式。 总结而言,这项工作提供了一个磁性软体机器人平台,使其能够对无脊椎动物的复杂运动进行解耦和重新编程,并掌握它们的基本机制。这也为设计具有复杂耦合步态的游动软机器人提供了新的思路。
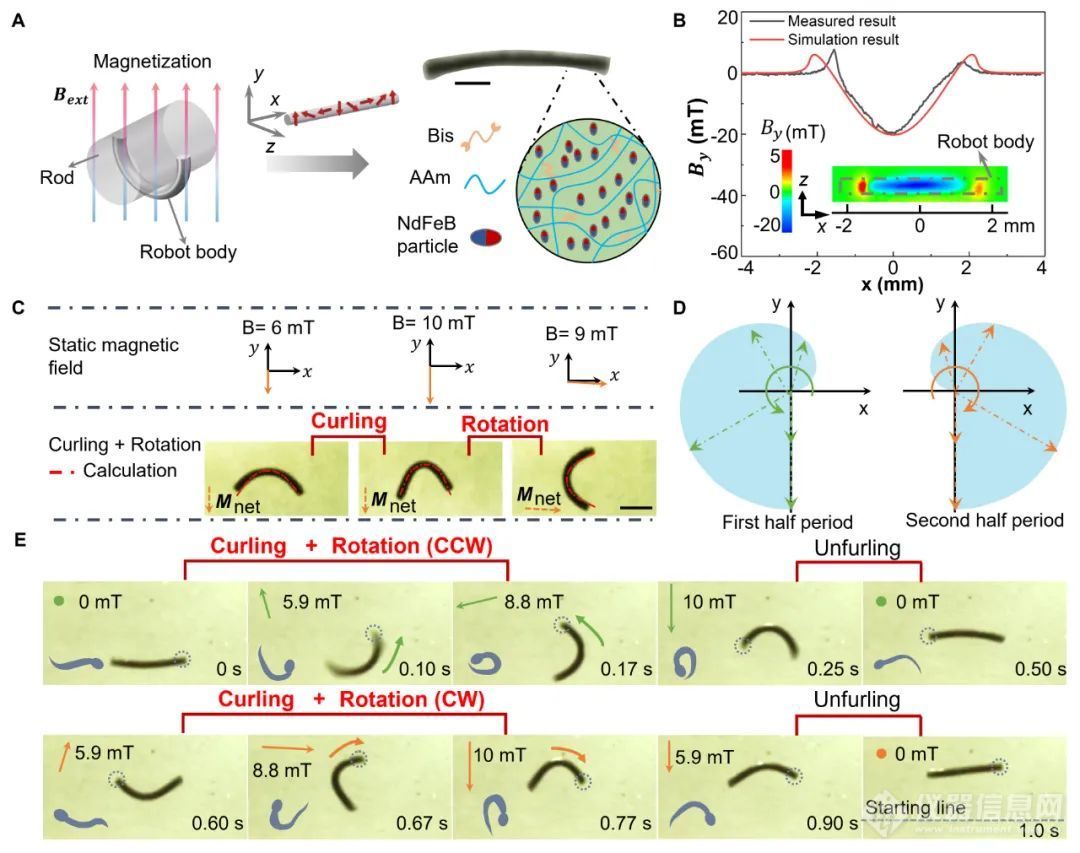
图1. 软体机器人的磁场控制和运动分析。(A)机器人的模板辅助磁化方式;(B)沿着机器人中心线的磁通密度分布;(C)软体机器人在不同静态磁场下的变形和转向;(D)用于控制软体机器人的动态磁场;(E)软体机器人在一个周期内的运动序列。
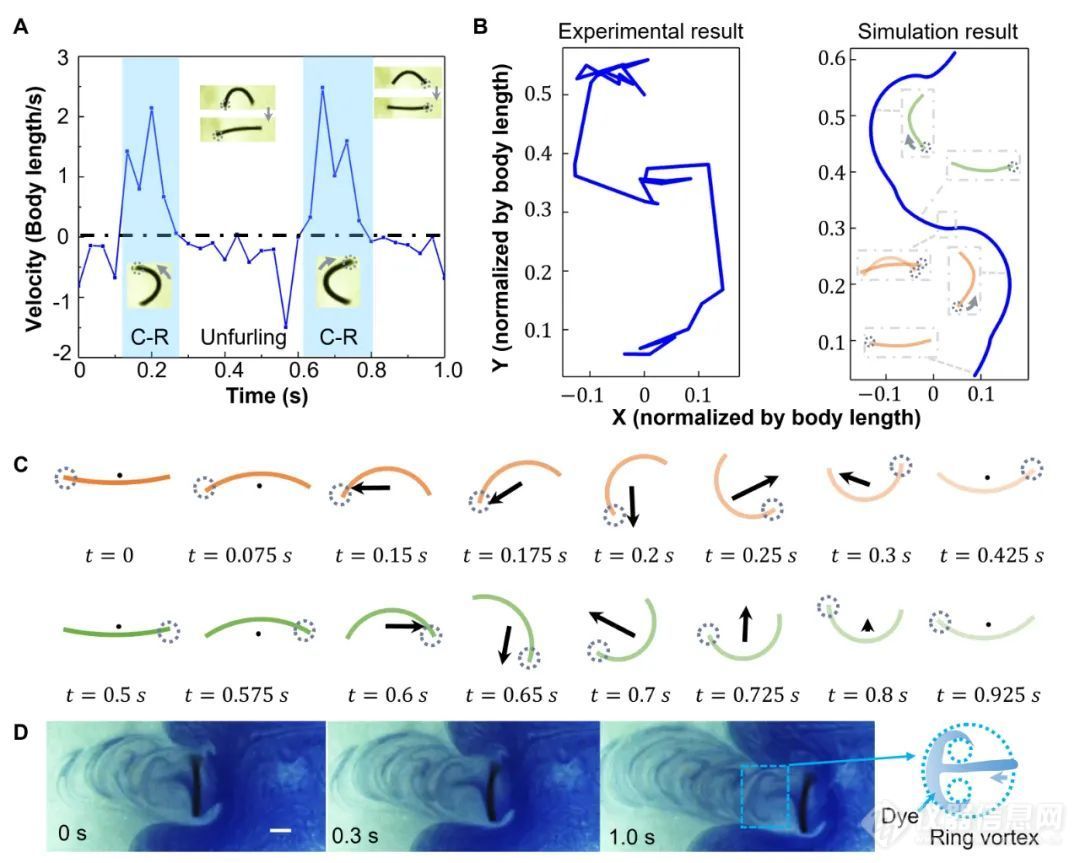
图2. 软体机器人的流场动力学模拟和流场可视化分析。(A)在一个周期内软体机器人的瞬时速度;(B)软体机器人质心轨迹的实验和模拟结果;(C)在一个运动周期内施加到机器人身体上的净流体力;(D)流场结构的可视化。
图3. 软体机器人平台用于解耦复杂生物运动。(A)机器人身体卷曲和旋转之间的相位差对运动性能的影响;(B)机器人身体的转动角度对运动性能的影响;(C)磁场强度对机器人运动性能的影响;(D)磁场频率f2/f1 对机器人运动性能和前进速度的影响;(E)磁场频率feq对机器人运动性能的影响。(F)机器人运动方向和磁场方向角的关系。
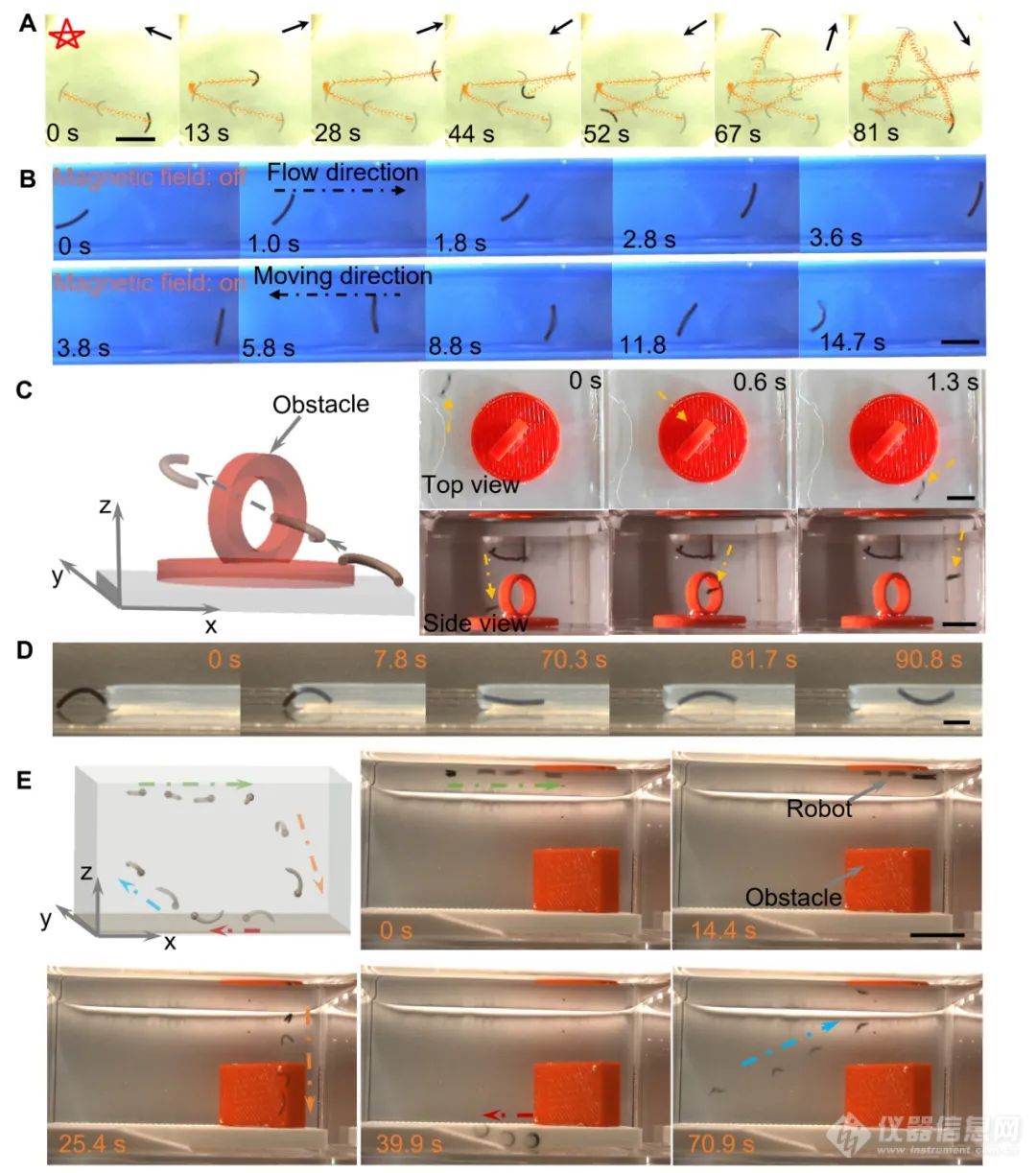
图4. 软体机器人的多模态运动。(A)机器人沿着五角星轨迹的可控运动;(B)机器人在动态环境中的运动;(C)机器人的三维游动和避障行为;(D)机器人在狭窄空间内运动;(E)机器人通过多种模式运动探索三维空间。
原文链接:https://doi.org/10.1002/adma.202109126
更多![]()
摩方携手国内科研团队,从实验室创新到全球产业化
厂商
2024.11.04

微纳3D打印:推动生物支架研发进程,实现高端医疗器械自主创新
厂商
2024.11.04
韩国航空宇宙研究院《JGR Planets》:基于3D打印月壤三维模拟物在小相位角下的光散射特性研究
厂商
2024.11.01
摩方精密圣地亚哥研究院研发突破性仿生三维可灌注血管化皮肤芯片成功,开启药物与化妆品测试新时代
新品
2024.10.30


公司名称: 摩方新材
公司地址: 广东省深圳市龙华区红山6979商业区26栋5楼 联系人: 邢先生 邮编: 518110 联系电话: 400-860-5168转4666
仪器信息网APP

展位手机站