
 关注
关注
已关注
![]() 已认证
已认证
粉丝量 0
400-860-5168转4666
仪器信息网认证电话,请放心拨打
CRPS:哈工大郝崇磊/李兵团队发现液滴定向饼状弹跳现象
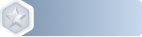
物质科学Physical science近日,哈尔滨工业大学(深圳)机电学院郝崇磊助理教授与李兵教授团队合作,报道了基于有序微结构上的液滴定向饼状弹跳现象。该工作为液滴的快速脱离提供了新的思路,2022年1月10日,该研究成果以“Oblique pancake bouncing”为题发表在Cell Press细胞出版社期刊Cell Reports Physical Science上。哈工大(深圳)机电学院陶然博士和2018级本科生梁国强为该论文共同第一作者。固/液接触时间是衡量界面动态润湿性的重要参数,也是决定固液之间质量、动量和能量传递效率的关键因素之一。在流体与热能传输、能源收集、防污减阻和防覆冰等涉及多物理场耦合的机械工程应用场景下,如何减少固/液作用时间并促进复杂表面液滴高效流动与传输是一个共性难题。尽管研究者们已经提出过一些减少固液接触时间的方法,然而液滴在撞击反弹后会再次降落在撞击点附近,造成固液二次接触从而不利于流体从工况表面的快速脱离。针对上述问题,近日,哈尔滨工业大学(深圳)机电学院郝崇磊助理教授与李兵教授团队合作,报道了基于有序微结构上的液滴定向饼状弹跳现象。研究者设计了一种倾斜的Janus微结构,利用该结构,可同时实现固液接触时间减少(液滴呈饼状反弹)和液滴的定向输运。液滴定向输运的距离可通过对固体表面的结构参数和液滴自身的物理参数进行调控。该工作为液滴的快速脱离提供了新的思路。通过3D打印加工制造的倾斜Janus结构,同时结合了结构单元自身非对称(一面为平面,一面为曲面)效应和结构阵列倾斜效应,由此可提高液滴定向运动的能力。同时,研究者也设计了倾斜圆锥结构作为对照实验对象。图1 仿生倾斜Janus和倾斜圆锥结构的形貌特征由于倾斜Janus单元的二级不对称性,毛细力在其平面侧和曲面侧的水平分量不能相互抵消,因此在液体碰撞过程中,受到一个水平力,使得液滴产生水平方向运动。与此同时,微结构尺寸的参数优化设计,使得液滴受到一个向上的毛细排空力,引发液滴在回缩之前呈饼状反弹。两种效应的作用在时间尺度与空间尺度相互耦合,促成液滴定向饼状弹跳。在倾斜Janus和倾斜圆锥结构上,液滴均呈现出定向饼状弹跳状态,但液滴在倾斜Janus结构上的定向输运位移距离更长。图2 液滴定向饼状反弹动态和机理液滴定向饼状反弹在高韦伯数下也能实现。同时,液滴定向运动能力受韦伯数调控,韦伯数越高,定向移动距离越大。图3 高韦伯数下的定向饼状弹跳进一步,研究者们阐明了液滴定向饼状弹跳在不同温度下的普适性。液滴定向运行位移、固液接触时间、以及接触线的时间演变趋势均与基底温度无关。这是因为碰撞过程中固液接触时间极短,由此限制了从固体到液体的传热。图4 不同温度下的定向饼状弹跳动态表征▌DOI:https://doi.org/10.1016/j.xcrp.2021.100721CellPress细胞出版社官网:https://www.bmftec.cn/links/10
应用实例
2022.11.28
磁场驱动微板阵列表面实现定向输运
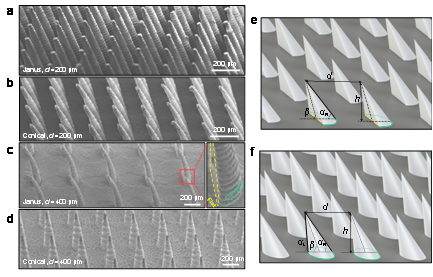
设计并驱动微纳米结构表面实现物体的定向输运在微电子、生物医药及防污自清洁等领域具有广泛的应用前景。在这些应用领域中,提高定向输运的速度能进一步提高输运效率。此外,通过对微结构和驱动方式的创新性设计,实现对多种不同形状的物体在不同环境中的定向输运也具有重要意义。近日,北京理工大学先进结构技术研究院陈少华教授课题组提出了一种通过磁场控制微结构表面快速输运固体物块的方法。该方法能够对厘米级的固体物块进行快速定向输运,其输运速率相对于已有文献中的输运速率有大幅度的提升。微结构表面主要由磁响应微板阵列结构和纯PDMS基底组成,单个微板高度为950微米,厚度为150微米。该研究结合微尺度3D打印技术制备实验样件,所使用的3D打印设备(nanoArch S140,摩方精密)的光学精度为10μm,能实现94×52×45mm大小的三维加工尺寸。基于该设备加工了板状微结构阵列,并通过倒模制备出含有磁颗粒的PDMS微结构试样,然后通过磁场控制微结构的变形储能以及能量的快速释放,实现定向输运的功能。该成果以“Directional Transportation on Microplate-Arrayed Surfaces Driven via a Magnetic Field”为题发表于国际期刊ACS Applied Materials & Interfaces上。该工作由北京理工大学先进结构技术研究院李程浩博士作为第一作者完成。原文链接:https://pubs.acs.org/doi/10.1021/acsami.1c09648图1.微结构制备及实验装置示意图图2.固体物块定向输运及驱动过程分析图3.通过磁场控制微结构表面实现不同形状物体的定向输运,及不同重量物体的筛选分离(空气环境和水下) 该研究提出了一种通过磁场控制微结构表面快速输运固体物块的方法,并揭示了输运机理:通过磁场控制微结构变形储存弹性能,然后通过控制微结构逐个回弹,使得储存在微结构中的弹性能依次快速释放,并驱动物体连续向前运动,以此实现固体物块的快速定向输运。此方法具有广泛的适用性,能够在空气和水环境中同时输运不同形状的物块,且能够较好控制输运速度,对于更加智能甚至编程化的定向输运技术具有重要意义。官网:https://www.bmftec.cn/links/10
应用实例
2022.11.25
深圳大学董海峰教授《ACS Nano》:DNA水凝胶微针贴片,无创检测癌症相关靶标
大量研究表明,miRNAs的异常表达与肿瘤的发生和迁移高度相关。它被认为是肿瘤早期诊断和临床治疗的潜在生物标志物。最近的实验证据表明,在血液中发现的所有类型的RNA也以相似比例存在于间质液中。对无创采样和个性化生理监测的需求不断增长,激发了人们对可作为生物标志物信息库的ISF进行探索的兴趣。因此,开发一种强大的微创方法在皮肤ISF中取样足够的靶点是势在必行的。由于miRNA在ISF中的表达水平较低,样本量有限,因此对ISF中miRNA的检测提出很大的挑战。为解决这一问题,深圳大学董海峰教授团队构建了由甲基丙烯酸透明质酸(MeHA)包裹的智能DNA水凝胶系统组成的微针贴片,用于快速采样和敏感检测皮肤ISF中的miRNA生物标志物。MeHA/DNA基质具有极高的亲水性,可在较短时间内提取足量的ISF (5 min, 0.97±0.2 mg)。此外,级联Toehold介导的DNA链置换信号扩增可以灵敏地检测低丰度的miRNA (低至241.56 pM)。该研究以题为“Microneedle Array Encapsulated with Programmed DNA Hydrogels for Rapidly Sampling and Sensitively Sensing of Specific MicroRNA in Dermal Interstitial Fluid” 的论文发表在《ACS NANO》上。用于信号放大的DNA水凝胶制备及可行性验证图1. DNA水凝胶的结构和链置换过程DNA水凝胶呈现出三维聚合物网络结构,其由 6 条单链 DNA(S-1 至 S-6)制备而成,分为长双链 DNA([S-1/S-2] n)和交联剂(CL)。[S-1/S-2] n和 CL 都有悬浮的单链 DNA(绿色),DNA水凝胶是由二者悬浮单链之间的杂交形成的。天然聚丙烯酰胺凝胶电泳(PAGE)证实了DNA水凝胶的成功形成和Toehold介导的链置换过程。透射电子显微镜(TEM)图像显示了DNA水凝胶微粒平均大小为700 nm。此外,进一步使用FL光谱分析来研究其可行性,与对照组相比靶miRNA引起的S-6置换触发FL恢复(绿色曲线),而燃料探针的加入进一步导致FL急剧增加(红色曲线)。MN的制备和表征图 3. 交联 MeHA/DNA-MNs 贴片制造工艺示意图及性能表征(形貌、机械强度、生物毒性、溶胀性等)为了制备 MeHA/DNA-MN,将 MeHA 水溶液和 DNA 水凝胶充分混合,然后倒入 PDMS 模具中(该模具是利用摩方精密的nanoArch P150设备打印微针阵列,结合PDMS翻模制成),在蓝光照射下交联并在室温下干燥。最后,从模具中剥离干燥的 MeHA/DNA-MNs 贴片。获得的 MeHA-MNs 贴片是15 × 15 的针头阵列,尖端锋利,高度为 860 ± 10 μm,底宽约为 340 ± 10 μm,针间距约为 800 μm。放大扫描电子显微镜 (SEM) 图像显示MeHA/DNA 水凝胶具有均匀分布的孔隙,这种互穿网络结构增加了 MN 的表面积和对样品的提取。通过压缩实验证实了交联的 MeHA-MNs 贴片和 MeHA/DNA-MNs 贴片具有相似的机械强度,表明 DNA 水凝胶对机械强度的影响很小。组织学研究显示穿透深度为 250 ± 20 μm,表明 MN 可以穿透表皮(厚度为 50-150 μm)以到达真皮。交联的 MeHA/DNA-MNs 贴片在琼脂糖凝胶中 15 分钟内可提取 86.6 ± 2.7 μL液体。通过 MeHA/DNA-MN 进行体外 miRNA 成像图4. 探究在琼脂糖和新鲜猪皮模型中MeHA/DNA-MN miRNA 成像性能为了测试 MN 贴片原位采样和检测 miRNA 的能力,首先研究了其在琼脂糖凝胶和暴露于不同浓度 miRNA-155 的新鲜猪尸体皮肤中检测 miRNA的性能。结果表明,在琼脂糖凝胶中可检测到低至 241.56 pM 的 miRNA。接着研究了其区分各种类型 miRNA 的能力,miRNA-155产生的FL强度分别是miRNA-205和miRNA-21产生的FL信号的2.19倍和2.39倍,这表明MNs检测具有良好的特异性。使用新鲜猪尸体皮肤模型验证了 MNs 对体外 miRNA 检测的敏感性和选择性,与对照(没有 miRNA 预处理)和 miRNA-205、miRNA-21 预处理相比,MNs 穿透与 miRNA-155 孵育的猪尸体皮肤显示出更高的 FL 发射,有力地证实了 MeHA/DNA-MNs 具有很好的在采样和分析皮肤 ISF 中的 miRNA 方面的潜力。通过 MeHA/DNA-MN 进行体内 miRNA 成像图 5. 在小鼠模型中使用 MeHA/DNA-MNs 贴片提取皮肤 ISF 和 miRNA 的 FL 信号分析使用小鼠模型来研究体内 MN 贴片的特性。将 MN 贴片压入小鼠背部皮肤,去除 MNs 贴片后微孔在 5 分钟内变得不可见, 30 分钟后皮肤未观察到红斑或水肿,验证了MNS不会引起任何炎症反应。为了研究体内毒性,健康小鼠和荷瘤小鼠用MN处理后处死小鼠,取主要器官(心脏、肝脏、脾脏、肺和肾脏)进行H&E 染色,微针植入后器官未见明显病理变化或毒性反应。MN 能够在 5 分钟内从小鼠实验中提取 0.97 ± 0.2 mg(约 0.97 ± 0.2 μL)的 ISF。此外,探讨了该平台用于检测肿瘤小鼠中 miRNA的性能。穿透无肿瘤小鼠MN 的 FL 强度比荷瘤小鼠低 1.58 倍,这有力地证实了 MeHA/DNA MNs 在体内采样和分析皮肤 ISF 中 miRNAs 的巨大潜力。结论作者开发的MeHA/DNA-MNs贴片不仅具有高机械强度以穿透皮肤,而且具有高亲水性,可以在短时间内提取足够的ISF。在 DNA 凝胶中精心设计了一个级联的Toehold介导的 DNA 置换反应检测系统,用于 ISF 中的 miRNA 信号放大分析。设计的贴片在小鼠模型实验中显示出在小鼠模型中有效且灵敏地监测乳腺癌相关 miRNA 的良好能力。MeHA/DNA-MNs 在临床应用中具有微创个性化诊断和实时健康监测的巨大潜力。全文链接:https://doi.org/10.1021/acsnano.2c06261来源:高分子科学前沿官网:https://www.bmftec.cn/links/10
应用实例
2022.11.25
基于高精度3D打印的垂直U型环太赫兹超材料
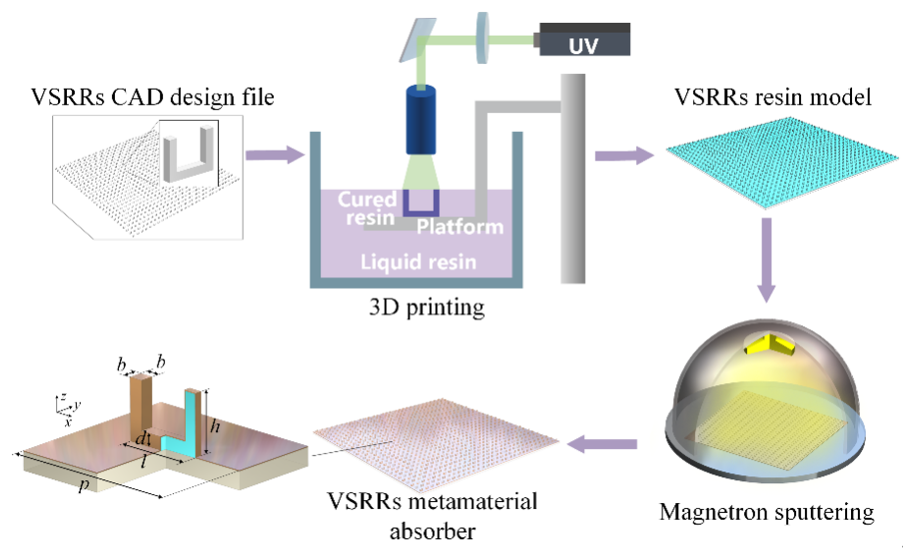
由于能够对太赫兹电磁波产生有效的调制,近年来,太赫兹电磁超材料受到了科研界极大的关注。太赫兹超材料的单个单元的特征尺寸一般为几十微米,传统的加工主要基于MEMS微纳加工工艺流程。然而,这些工艺流程通常都需要昂贵的实验设备并且是多工序且高耗费的。为了克服这些缺点与不足,西交大张留洋老师课题组提出了一种基于微纳3D打印结合磁控溅射沉积镀膜的太赫兹超材料制造工艺:以基于垂直U型环谐振器的三维太赫兹超材料为原型,采用高精度微纳3D打印设备nanoArch S130(BMF摩方精密)对模型进行加工,随后通过磁控溅射沉积镀金属膜赋予该结构功能性。该成果以“3D-printed terahertz metamaterial absorber based on vertical split-ring resonator”为题发表于Journal of Applied Physics期刊。原文链接:https://aip.scitation.org/doi/10.1063/5.0056276 图1 基于垂直U型环的太赫兹超材料制备工艺示意图。采用面投影微立体3D打印工艺(nanoArch S130,摩方精密)在硅片表面制造树脂超材料模型,然后通过磁控溅射在树脂模型表面沉积覆盖金属铜膜。插图为基于垂直U型环的太赫兹超材料的模型剖视图。图1所示为所提出的基于垂直U型环的太赫兹超材料制造工艺流程示意图。首先,通过三维建模软件建立了超材料的数字模型,将该数字模型转化为STL格式就可以输入3D打印设备进行打印制造。打印所采用的树脂材料为一种耐高温的光敏树脂(High-temperature resistance photosensitive resin, HTL)。为了加强所打印的垂直U型环结构和硅片界面处的粘附性,在U型环和硅片表面之间额外打印了一层树脂基底。在树脂模型制造完成之后,采用磁控溅射镀膜工艺在树脂模型的表面沉积铜膜。所使用的3D打印设备(nanoArch S130,摩方精密)的光学精度为2 μm,最小打印层厚为5 μm。所采用的加工工艺主要依赖于3D打印技术,这使得整个制造过程相当的简单和高效。图2 所制造的垂直U型环太赫兹超材料扫描电镜照片与太赫兹时域光谱系统测量所得吸收谱。(a)垂直U型环局部阵列。(b)单个垂直U型环照片。(c)与(d)分别为测量和仿真所得的分别在x极化和y极化入射下超材料的吸收谱。 制造的超材料阵列的总体尺寸为9.6 ×9.6mm,一共包含了30×30个单元结构。从电镜图中可以看出,所选用的3D打印技术(nanoArch S130,摩方精密)可以很好地完成设计的微结构的成型。THz-TDS测量结果表明,在x极化下,超材料在0.8 THz处达到了96%的近一吸收,而在y极化下没有出现吸收峰,这与仿真所得的结果基本一致。图3 高Q值三维太赫兹超材料传感研究。(a)传感分析物的示意。(b)谐振峰频率随传感分析物的厚度而变化。(c)加载不同折射率分析物时的超材料吸收谱 (d)超材料传感折射率灵敏度。(e)加载乳糖与半乳糖粉末时的测量结果。(f)吸收峰频率的偏移。 通过仿真和实验研究了样品的传感特性。分析得出,随着传感物厚度的增大,频移逐渐加大,当厚度大于100μm时得到了最佳的效果。计算得到传感器的灵敏度为S = 0.5 THz/RIU,品质因数为FOM = 95.9。所制造的垂直U型环超材料的高度为75μm,适用于检测具有一定厚度的分析物。因此,该研究选择了典型的乳糖和半乳糖粉末作为分析物来验证垂直U型环传感器的传感能力。如图3 (e)所示,在样品表面加载乳糖和半乳糖粉末后,吸收峰的中心频率分别变为0.5335 THz和0.7603 THz,频移分别为0.2665 THz与0.0397 THz,获得了有效且明显地频移,验证了样品在折射率传感等领域的应用潜力。官网:https://www.bmftec.cn/links/10
应用实例
2022.11.24
基于PμSL技术的微米级可拉伸电子一体化制造
柔性可拉伸电子器件具有可弯曲、可拉伸和可扭曲的优异力学特性,其在生物医学工程、机器人技术、人机界面等各个领域的应用重要性日益凸显。常见制备方法一方面是开发本征可拉伸的导电材料,例如掺杂导电纳米材料的软弹性体、导电聚合物和水凝胶等。但是,这些新型材料通常电导率较低、机电稳定性能较差和易对实际应用中的电信号造成干扰。另一方面则是通过构建如平面蛇形等几何结构来提升传统导电材料(包括金属等)在力学服役下的最大可拉伸应变。虽然以上两种(结合)方法都已有大量报道,然而大部分的可拉伸电子受限于加工方式的难度,制备的结构大多集中在二维平面尺度,限制了可拉伸电子在三维方向的应用扩展。近日,香港城市大学机械工程学系陆洋,南方科技大学葛锜与西安电子科技大学高立波等合作报道了一种相对便捷、灵活和可批量制造的可拉伸微电子的高精度制作方法。通过利用摩方精密开发的基于面投影微立体光刻(PμSL)的3D打印技术(nanoArch P130, S140, BMF Precision, Shenzhen, China),实现了一种通用的微加工工艺,可以以2μm的高分辨率获得以前无法实现的复杂3D几何形状。后续结合磁控溅射工艺,可制备3D导电结构,该结构具有出色的可拉伸性(~130%)、贴合性、稳定的导电性(在100%拉伸应变下电阻变化小于5%),以及循环载荷下的稳定性。与2D结构相比,3D微结构具有紧凑的几何形状,并且其可以在平面外自由变形的特点使适应更大的拉伸应变成为可能。图1. 基于面投影微立体光刻(PμSL)3D打印的可拉伸微电子的制作过程:3D几何设计、PμSL 3D打印、磁控溅射导电金属薄膜、组装和应用此外,利用基于PμSL的3D打印技术可以制作高度复杂几何结构的优势,该方法可实现集成电路的一体化制造。例如,研究者们制造了由三维可拉伸微结构连接的复杂三维电容式压力传感器阵列。凭借其结构设计高通量性、加工方式便利性和器件制造一体化性,该研究成果在集成3D可拉伸电子系统上显示出巨大的应用潜力。图2. 三维可拉伸导电微结构的力学和电学鲁棒性测试:拉伸、弯曲、循环和面外压缩加载下的电阻变化图3. 3D打印三维可拉伸电子网络结构表征和变形能力测试图4. 三维可拉伸电容式压力传感器阵列示意图、细观实物图和性能测试结果该项研究成果获得深圳市科创委基础研究项目支持,以“Three-Dimensional Stretchable Microelectronics by Projection Micro Stereolithography (PμSL)”为题发表于新一期国际知名期刊《ACSApplied Materials & Interfaces》(香港城市大学王月皎博士生为第一作者)。文章链接:https://dx.doi.org/10.1021/acsami.0c20162官网:https://www.bmftec.cn/links/10
应用实例
2022.11.22
深度学习助力增材制造梯度力学超材料逆向设计
由于其特异的宏微观基元拓扑构型,力学超材料在刚度、韧性、减隔振和热膨胀等性能方面显著优于传统均质材料,受到了航空航天、生物医学、电子电路和土木工程等领域的广泛关注。生物体经过长期进化形成的各类器官,与超材料的概念相契合,即通过多层级微结构实现超常物理力学特性,同时生物器官的微结构基元还呈现出梯度渐变、长程无序等特征。目前,针对力学超材料发展的拓扑优化方法和机器学习设计方法,主要面向周期性结构,对于仿生梯度超材料的逆向设计和优化,缺乏高效率、高保真的计算分析方法。 图1深度神经多网络系统实现多属性胞元的定制总体思路框图近期,来自北京理工大学的研究者们提出了一种加速梯度力学超材料逆向设计的深度学习方法。发展了一种由对抗神经网络(GAN)、性能预测网络(PPN)和结构生成网络(SGN)组成的多重网络深度学习框架,如图1所示,可实现力学性能参数和拓扑构型的快速双向映射。基于此深度学习框架,将各向异性材料杨氏模量、剪切模量和泊松比组成的属性空间,类比于R-G-B色彩空间,进而将梯度力学超材料逆向设计转换为色彩匹配问题。利用HTL树脂3D打印(NanoArch S140,摩方精密)制备了超材料结构样件,采用数字图像相关(DIC)方法验证了逆向设计的有效性。相关成果以“A Deep Learning Approach for Reverse Design of Gradient Mechanical Metamaterials”为题发表在《International Journal of Mechanical Sciences》期刊。图2 周期性超材料的应力应变曲线和泊松比应变曲线,其中左侧插图为3D打印试件,右侧插图为有限元分析模型。(a) 正泊松比结构。(b)零泊松比结构。(c)负泊松比结构;该研究中,首先基于拓扑优化方法得到了不同杨氏模量E、泊松比υ和剪切模量G的超材料胞元,并建立对应的属性空间作为数据样本。随后,基于Keras平台搭建了具备三个卷积解码/编码网络的深度神经网络系统,用于实现结构性能评估、结构补充与结构生成。基于拓扑优化样本实现PPN网络的离线训练,同时结合随机结构训练GAN网络以补充胞元属性空间。最后,基于属性空间扩充后的样本进一步训练SGN网络,对于任意的力学参数目标,均可在0.01秒内给出胞元构型,实现了多属性胞元的快速逆向设计。针对优化设计和网络预测得到的特定属性结构进行3D打印(如图2所示),并开展DIC压缩试验表征了其模量与泊松比,验证了算法的准确性和有效性。 图3 相邻胞元结构连通性的实现:(a)单元边界的定义和连接的分类(具有不同颜色的结构表示不同的属性);(b)SGN网络调整初始设计;(c)经过网络匹配得到的最终结构。在超材料胞元快速逆向设计的基础上,创新提出了一种结构像素化方法,通过结构的E-υ-G属性与R-G-B通道一一映射,将结构属性数据库转化为像素数据库。首先基于像素匹配的方式生成满足宏观属性需求的初始设计,随后网络系统根据结构的连通性要求进一步优化胞元结构,保证宏观结构的可制造性,如图3所示。研究者们以髋关节假体为例,开展了梯度超材料结构的快速设计。如图4所示,髋关节假体在人体中主要承受非轴向载荷,如果嵌入骨骼中的部分发生弯曲,受到弯曲拉应力作用的一侧,将牵引其上附着的骨组织,诱发组织损伤。模仿实际骨骼的力学属性分布特征,采用神经网络系统在不同位置自动排列模量与泊松比梯度变化的超材料胞元(图5),从而调整了宏观结构的变形模式,使髋关节植入结构的两侧,均保持在压应力状态,解决了假体界面失效的问题。计算模型基于围绕假体的凹槽,用于模拟假体插入骨骼,固定凹槽的底端并在假体的顶部施加非对称压缩载荷。同时他们还建立了一个多材料模型,每个晶胞区域代表一种材料,材料性质与超材料模型中相同位置的晶胞的E-G-υ一致。两种模型的水平位移计算结果如图5f所示,槽左侧的位移为负,而右侧的位移为正,这表明假体两侧的界面被均匀挤压。假体与骨牢固结合,有效防止界面破坏,梯度结构具有完美的连接状态,类似于超材料模型的设计目标。超材料模型和多材料模型的计算结果高度一致,证实了他们提出的超材料设计方法的准确性,这种有效的连接策略在满足增材制造要求的同时实现了与多材料设计相同的性能。图4 人体髋关节假体的受力状态。(从外到内为皮肤、髋骨和假体。假体受到不对称轴向压缩力作用,中间的粉红色区域被选为目标设计区域。) 图5 深度神经网络系统实现梯度模量/泊松比髋关节结构设计:(a)具有生物相似结构的梯度模量分布;(b)受变形模式启发的泊松比分布;(c)叠加后的最终力学性能分布;(d)GSN网络在像素匹配后调整结构;(e)满足目标模量和泊松比设计要求的超材料髋关节结构。(f)模拟假体受载的位移云图,等效多材料模型(上)和超材料模型(下)。
应用实例
2022.11.22
北航: 具有高运动精度和高输出力的可变形磁流体机器人
在生物医学研究中,对生物颗粒(如细胞和生物组织)的操作,特别是捕获和运输,是各种生物应用的基础。许多工具和驱动系统被设计用来提高操作的准确性和效率。磁驱动机器人具有精确操纵粒子或生物组织的能力,在生物医学、生物工程和生物物理学领域具有重要的潜力。然而,具有预定形状的刚性机器人的变形能力是有限的,这限制了其在狭小的空间的运动。 近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授等研发了一种可变小型机器人,该机器人是利用具有磁性和流体性质的铁磁流体这一新型材料所研制的。该磁流体基机器人不仅可以根据不同的磁场的分布形成不同的形状,从而完成不同的任务;并且还可以借助于操作平台的疏水处理,使得磁流体基机器人与基板间的摩擦减小,进而简单高效地提高了机器人的实际输出力。图1. 通过多种形状的永磁铁产生的集中磁场改变磁流体形状进而达到搬运不同模块的目的为了证明这种磁流体基机器人所具有的且刚性机器人所欠缺的实际应用能力,作者设计了几个验证实验:1.制造不同形状的永磁体并磁化,观察不同磁场下磁流体基机器人的变形情况;2. 打印不同形状的模块,测试磁流体机器人的搬运能力;3.打印狭缝,测试机器人穿越窄缝的性能。通过采用PμSL 3D打印技术(nanoArch S140,摩方精密),实现了验证实验中的搬运模块、永磁模具及狭缝的精密制造。图2. 永磁体的制造流程及磁流体基机器人的变形图3. 磁流体基机器人在平面上的三自由度运动图4. 磁流体基机器人穿越狭缝动画及实物演示该项研究成果获得国家重点研发计划(No.2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持,以“Deformable ferrofluid-based millirobot with high motion accuracy and high output force”为题发表于国际期刊《Applied PhysicsLetters》(北京航空航天大学陈迪晓硕士为第一作者)。
应用实例
2022.11.18
东华大学游正伟团队ACS Nano:具有高度灵活性的三维运动仿生机器人
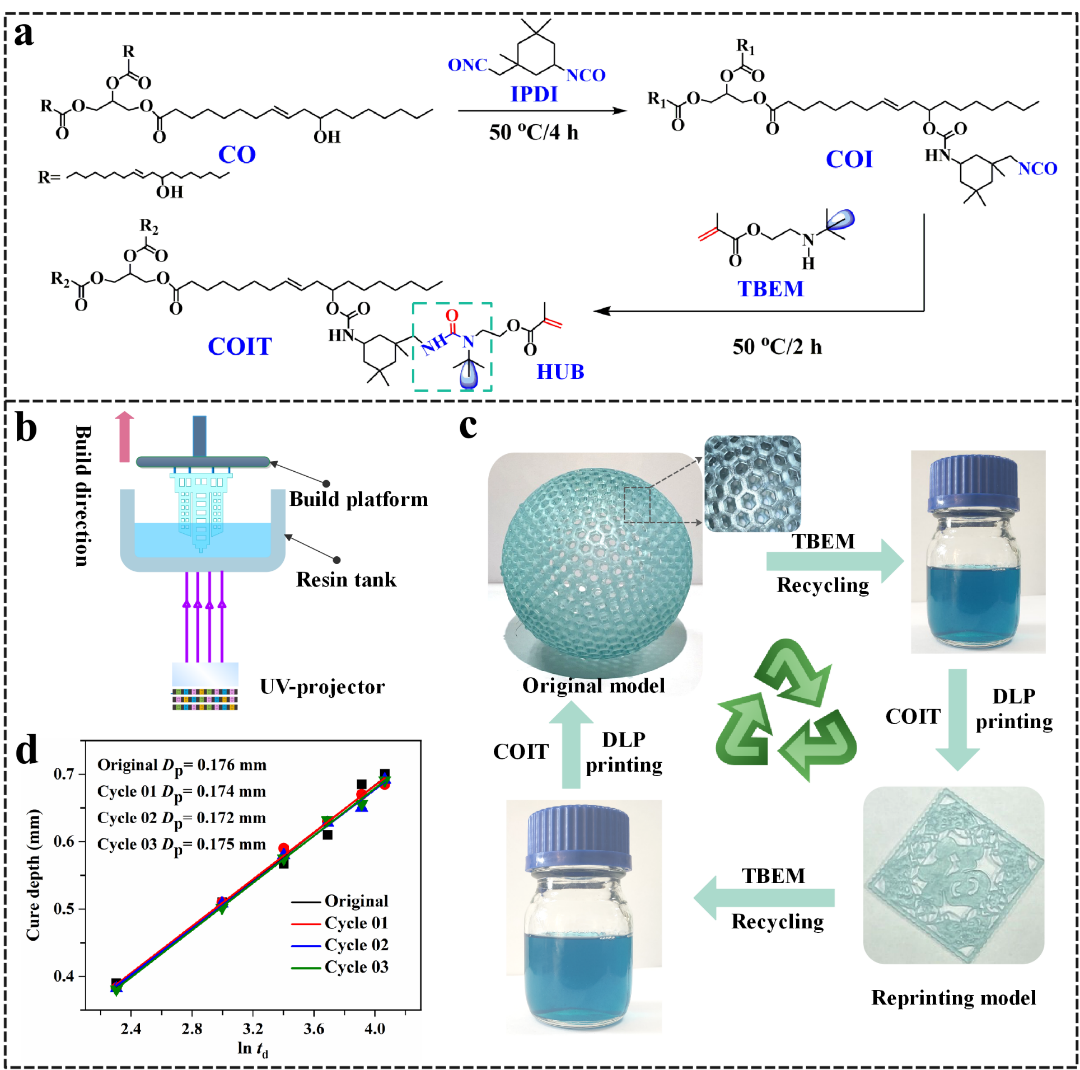
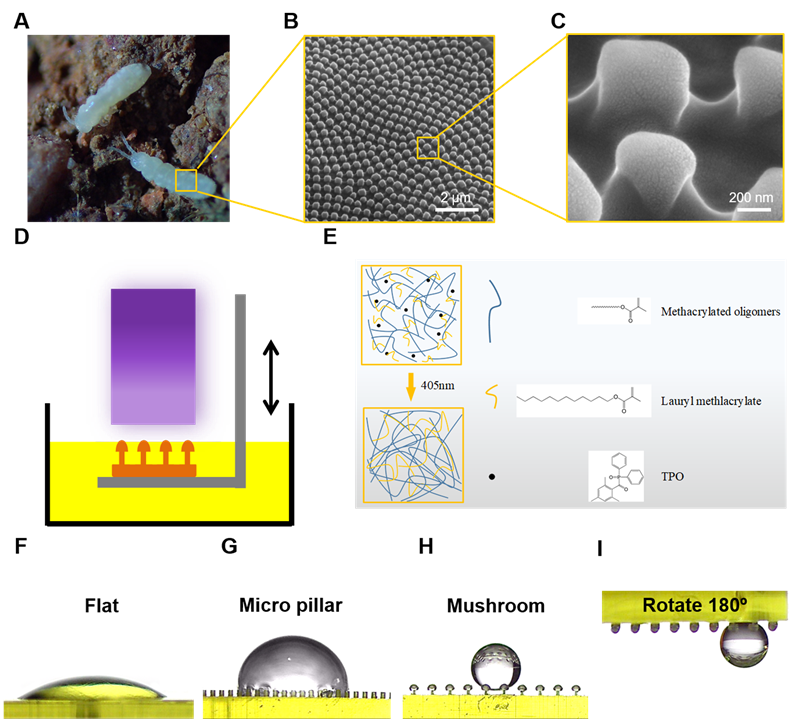
智能机器人的快速发展必将给人类的日常生活带来一场革.命。随着他们与复杂操作环境融合的要求越来越高,柔性和可变形机器人的发展变得至关重要。然而,现有的机器人通常需要刚性的电机泵来提供能量,并限制了其对环境的适应性。全软体机器人由于其优越的适应性和友好的人机界面,已经引起了人们的极大关注。已经报道了具有不同类型运动的水生软体机器人,如爬行、跳跃和游泳。然而,所报道的三维运动集中在单一相位上,要么是液体,要么是空气。没有报道与液体-空气界面有关。由于不平衡的机械环境,要在液气两相界面实现三维运动(X、Y和Z轴)仍然是一个艰巨的挑战。东华大学游正伟教授团队受半月板攀爬甲虫幼虫Pyrrhalta的启发,提出了三相(液-固-空气)接触线的机制,以应对上述挑战。一个基于光敏液晶弹性体/碳纳米管复合材料的3D打印的全软体机器人(名为larvobot)被开发出来。此机器人具有可重复的可编程变形和高自由度的运动能力,可以在液气界面的三维运动,包括扭转和滚动。通过分析幼虫机器人沿固体-水面的力学原理,建立了运动方程。同时,利用ANSYS计算应力分布,这与推测的结果相吻合。此外,软体机器人在精确的时空控制下由光远程驱动,这为应用提供了巨大优势,作者展示了软体机器人在封闭管道内的可控运动,这可用于药物输送和智能运输。相关成果以“Meniscus-Climbing System Inspired 3D Printed Fully Soft Robotics with Highly Flexible Three-Dimensional Locomotion at the Liquid–Air Interface”为题发表在ACS Nano上。第一作者为王洋和管清宝副研究员。可光聚合的主链液晶低聚物是由反应性中间物和胺连接物通过aza-Michael加成法合成的(图1b),它可以最大限度地提高潜在的致动应变。采用无溶剂基质来拉长LCE分子来最大限度地减少干燥过程中溶剂损失引起的体积变化和残余应力。在紫外光照射下,LCE的交联网络是通过3D打印过程后从活性丙烯酸酯端基中获得(图1a),这有利于保留程序化的中子排列。具有高光热转换效率和对近红外敏感的CNTs被用作关键部件,赋予LCE/CNTs复合材料精确的远程控制,并通过光实现方便和持续的能量供应。图1:3D打印LCE/CNTs larvobot的设计随着1 wt% CNTs的加入,LCE/CNTs条带的表面温度在0.69秒内达到约91℃,并能在不到8秒内从25℃上升到∼260℃(图2a)。LCE/CNTs墨水可直接写墨打印(图1a),在向列相内,墨水具有剪切稀化特性,墨水的粘度在 50-60°C 时出现了急剧的下降(图 2b)。为了使用直接写墨打印的长丝具有高保真的几何形状,打印温度被设定为50℃,所以LCE/CNTs墨水拥有及时的剪切稀化反应和合适的粘度。单轴印刷的LCE条显示了典型的各向异性的光学特性(图2c)。不同印刷速度的LCE条的取向程度用X射线衍射法进行了表征。结果显示,在12mm/s的印刷速度下,带材可以保持适当的形状和高的取向度(图2d)。这一事实说明从印刷注射器中挤出的LCE/CNT很容易使中间物质沿着编程的印刷路径对齐。为了了解全软机器人在两相界面上的驱动,作者还研究了由双层独立式LCE / CNTs条带组成的幼虫在空气中的光向性行为。通过打开和关闭NIR光,最初的扁平条带分别可以瞬间向上和向下弯曲(图1c)。图2:LCE/CNTs的表征除了条状的软体机器人,作者还印制了更复杂的结构。首先,LCE/CNTs软体机器人由四部分组成,具有不同的长丝方向,沿同一平面打印。上部和下部的灯丝倾斜了±45°。当+45°的部分被近红外光照射时,LCE/CNTs执行器向右旋转,反之亦然(图3a-b)。在近红外光照射下,由六个花瓣组成的、带有阿基米德螺旋方向的花丝的花状机器人正在绽放(图3c-d)。一个像孩子一样的LCE/CNTs全软机器人被打印出来,它可以随着近红外光的运动而跳舞(图3e-f)。图3g-h显示了一个网状的LCE/CNTs全软体机器人,其分子方向是通过直接书写墨水来控制的。该网状全软机器人由双层丝组成,一层的方向与另一层垂直甚至相反。与整个薄膜的旋转或弯曲不同,这种网状全软机器人在X-Y平面上表现出由近红外光远程控制的定点收缩。图3.基于空气中LCE/CNT的全软机器人的可编程空间运动随后,作者探索了方向控制和推进的机理,并尝试了力学分析(图4d)。在近红外光照射下,实现了幼虫机器人的自由泳。幼虫机器人随时间推移的实际位移和角速度如图4 g-h所示,这证实了图4c中描述的模型。值得一提的是,在1s内暴露于NIR光后立即开始运动,这与空气中的光热驱动一致(图4f)。在定向光暴露时,蜘蛛状全软机器人在液-空气界面的运动如图4j所示。当近红外光投射到远离蜘蛛状软机器人几何中心的左腿时,暴露部位的温度达到了向列到各向同性的过渡点(TN-I),并产生向光的弯曲。因此,蜘蛛状软机器人上的力失衡,使其右转。同样,当NIR光照射到右侧时,蜘蛛状的软机器人向左转。当左右轮流照射时,机器人会直线向前移动而不是转弯。除了二维运动外,基于LCE/CNTs的幼虫机器人还表现出在液-空气界面处的三维运动能力。作者还打印了一个较小的larvobot,放置在直径为15毫米的封闭玻璃管中,由于光线的穿透,身体可以自由旋转,并在3.5秒内旋转360°(图4i)。图4. larvobot机器人的机械分析为了理解软机器人在液-空气界面的运动,通过沿三相接触线改变角度来诱导表面张力差,从而建立了运动机制。在此过程中,幼虫的运动由浮力Fb和表面张力FT (图4b)控制。当近红外光照射在幼虫机器人上时,该过程可分为坠落、游泳和离开。如图5所示a(i和iv),力(fL)的Larvobot在落下和离开的某个时刻接近平衡,这与图4e中的分析相似。在游泳过程中(图5a),暴露于近红外光时会产生幼虫机器人的各种变形,导致表面张力和水平面之间的角度和长度可变,这主要归因于超出半月板攀爬甲虫幼虫Pyrrhalta的内在运动的三维运动(图1d和图5b)作者又进一步论证了三相接触线的机理。随着沿接触线的倾斜度变化,FT运动方向增加,这使得幼虫机器人游得比以前更快。矢量图和速度的nephogram在计算域中给出(图5c-d)。幼虫机器人的横向毛细管力在被光照射之前沿三相接触线均匀分布。照射后,幼虫的力分布主要集中在照射区域(图5e)。事实证明,幼虫在液-空气界面处的多维运动是由表面张力的差异引起的,这与力学分析一致。图5.在 larvobot 的三维卷起中进行运动学分析和有限元模拟小结:综上所述,全软机器人在液-空气界面的多模运动是通过构建模仿半月板攀爬甲虫幼虫Pyrrhalta的三相接触线差分来实现的。功能性LCE / CNTs复合材料与3D打印技术相结合,可实现所得结构的高度自由度和可编程运动,甚至在液 - 空气界面处超越天然甲虫幼虫Pyrrhalta的三维卷起。此外,光热材料通过简单的光照射实现时空可控的运动和连续的能量供应。通过结合各种功能填充物、编程方向、图案和三维结构,可以进一步改变运动。这项工作中开发的设计原理和材料将激发下一代功能性软机器人的灵感。
应用实例
2022.11.18
基于PμSL 微尺度3D打印的三维微柱阵列电极
微芯片电化学检测系统(microchip-based electrochemical detection system, µEDS),是一种基于电化学方法与微流控技术的检测平台,其具有高灵敏度、极少试剂消耗、快速检测、可适性高、自动化等优点,常用于现场实时应用场景,比如床边检测等。此类芯片中核心组件是微电极,其检测性能尤为关键。传统的微电极主要是二维或平面式的结构,如环状、带状、平板式。另一方面,具有三维结构的微电极因其更大的反应面积和优异的检测灵敏度已获得越来越多研究学者的关注。微尺度3D打印技术的出现,使得三维微柱阵列电极的实现变得更加便捷、快速、高效。PμSL(Projection Micro Stereolithography,面投影微立体光刻)是一种面投影微尺度超高精度光固化增材制造技术,使用高精度紫外光刻投影系统,将需要打印的三维模型分层投影至树脂液面,分层光固化成型并逐层累加,最终从数字模型直接加工得到立体样件。该技术具有打印精度高、跨尺度加工、成型效率高、制造成本低等突出优势,被认为是目前最具有前景的三维微细结构加工技术之一。图1:PμSL技术原理示意图通过结合软光刻以及金属沉积技术,PμSL微尺度 3D打印技术近期在电化学检测领域取得系列成果。其中的微电极的制备过程大致为:通过PμSL微尺度3D打印技术打印得到三维微柱阵列模具,然后通过PDMS二次翻模得到PDMS材质的三维微柱阵列,最后再经过磁控溅射等金属沉积方式将金属比如金沉积在三维微柱结构的表面作为导电层以形成最终的微柱电极。此外,还可选择性地在电极表面修饰Pt-Pd/多层碳纳米管等其他改性物质以提高电化学检测性能。研究一:基于微柱阵列电极的生物标记物高灵敏度检测研究摘要:微柱阵列电极因其高质量运输、低检测极限以及微型化的特点被广泛用于电化学检测领域。该研究工作阐述了表面镀金的PDMS基微柱阵列电极的制备、数值仿真、表面改性以及表征。9×10的微柱阵列排布在0.09cm2的区域内,其中微柱的高度分别为100 μm,300 μm 和500 μm。微柱阵列电极是使用PμSL微尺度3D打印技术与软光刻相结合的方法制备而得,通过SEM和循环伏安法进行表征测试。实验结果显示,无论扫描速率的高低,高度值更大的微柱有利于提高电流密度。Pt-Pd/多层碳纳米管材料涂覆可进一步提高微柱阵列电极的电化学检测性能。相较于平板式电极,微柱阵列电极的电化学检测灵敏度是前者的1.5倍。高度500 μm的Pt-Pd/多层碳纳米管改性的微柱阵列电极可用于检测肌氨酸(一种前列腺癌的生物标记物),其线性范围和检测极限分别是5-60 μM 和1.28 μM。这个检测范围覆盖了肌氨酸在人体组织的浓度区间(0-60 μM)。因其更高的微柱高度和更大的比表面积,微柱阵列电极比平板式电极获得了更好的检测性能。该研究工作为高检测灵敏度的微柱阵列电极在低丰度分析物的检测应用提供了有效的指导。图2:微柱阵列电极的制备过程示意图及改性电极和电化学检测中典型的三电极式简易传感装置论文信息:DOI: 10.1039/d0ra07694e.研究二:动态微流体中微柱阵列电极的电化学检测研究摘要:高集成度、高灵敏度、快速分析、极小的试剂消耗等优点促使µEDS备受学术界的关注。微小化的工作电极是µEDS的核心部件,其性能决定了整个µEDS的检测表现。相比于传统的微电极形貌,如带状、环状、圆片状,三维微柱阵列电极因其更大的反应面积,具有更高的响应电流和更低的检测极限。在该研究工作中,采用数值仿真研究了µEDS的检测性能以及三维微柱的形貌和流体的动力学参数,包括微柱的形状、高度以及排列方式和反应溶剂的流速。µEDS的尾端效应在基于预设的电流密度参数下也进行了定量分析。此外,通过结合PμSL微尺度3D打印技术与软刻蚀的方法制备的PDMS基三维微柱阵列电极与微通道集成,用于研究电化学检测。循环伏安法和计时电流法测试的结果表明,实验数据与模拟数据吻合较好。此研究为µEDS的参数设计提供了指导性建议,所使用的方案亦可适用或借鉴于分析和优化基于纳米芯片的电化学检测系统(nanochip-based electrochemical detection system, nEDS)。图3:μEDS和微柱阵列的示意图以及微柱阵列的形貌参数论文信息:DOI:10.3390/mi11090858.上述研究中微柱电极结构模具均采用PμSL微尺度3D打印技术加工,所采用的加工设备均为摩方精密(BMF, Boston Micro Fabrication)公司10 μm光学精度设备P140,其最大打印尺寸为19.2mm (L)×10.8mm (W)×45mm (H),打印层厚为 10~40 μm。图4:BMF公司10微米系列精度设备P140/S140官网:https://www.bmftec.cn/links/10
应用实例
2022.11.16
可回收且可重复DLP-3D打印的生物基光敏树脂
3D打印制造技术,已经广泛应用于各种工业领域,如航空航天、生物医学、消费用品等。其中,数字光处理(DLP)型光固化3D打印技术由于打印精度高、速度快而备受人们的关注。然而,目前大部分光固化3D打印树脂来源于不可再生的化石能源,且废弃的3D打印制件不可回收利用,易造成严重的资源浪费及环境污染。部分研究者将动态共价键引入到光固化3D打印树脂中,废弃模型可以再次热压成型。但是,热压模型十分简单粗糙,且再加工材料老化严重,性能明显下降,故属于低价值回收。将光固化3D打印材料再次转化为液态光敏树脂,并重复应用于光固化3D打印,实现可循环的光固化3D打印,是可持续3D打印材料面临的重大挑战之一。近日,中国林科院林化所周永红/刘承果研究员团队开发了一种新型的、含有动态位阻脲键(HUB)的蓖麻油基光固化3D打印树脂,成功实现了打印材料的快速固液转化及可循环DLP打印。此外,将该材料用于打印牺牲模具,模具可以快速脱除并再打印;将该材料与温致变色微胶囊复合用于打印信息存储或防伪材料,实现了变色微胶囊的无损回收及循环利用。该工作以“Recyclable and reprintable biobased photopolymers for Digital Light Processing 3D Printing”为题发表于《Chemical Engineering Journal》, 第一作者为中国林科院2020级博士朱国强。该研究得到中国林科院院基金人才项目(CAFYBB2020QA005)和国家自然科学基金(31822009)的支持。 图1 光敏预聚体COIT的合成及可循环打印研究人员利用蓖麻油(CO)、异佛尔酮二异氰酸酯(IPDI)和甲基丙烯酸叔丁基胺乙酯(TBEM)合成了含有HUB的生物基光敏预聚体COIT。将COIT与30%稀释单体TBEM复配得到光固化3D打印树脂(COIT-T30)。打印材料中的位阻脲键在高温下可解离成异氰酸酯和叔丁基胺,同时利用稀释单体TBEM进行封端,交联网络被打开,打印材料逐渐降解。通过研究其降解动力学可知,当降解温度为90℃时,打印材料在TBEM溶液中仅需要4h 便可以完全降解成低聚物溶液,实现固液转化(100 ℃条件下仅需2h,考虑到温度太高会造成双键聚合等,选择90℃作为最佳降解温度)。最后,向降解的低聚物溶液中补充一定量的光敏预聚体COIT,得到可重复DLP打印的光敏树脂。 图2 COIT-T30打印材料的固液转化机理及降解动力学曲线考察了树脂的回收效率。首先,回收树脂的颜色与原始树脂完全一致,没有明显的老化变色。其次,经过连续3次回收后,回收材料的物理性能(粘度、收缩率等)、热性能、力学性能、聚合速率等也都基本保持不变,展示了优异的回收效率。因此,COIT材料的回收是快速且高效的,十分有利于循环3D打印。 图3 回收树脂与原始的性能对比、及回收效率3D打印可牺牲模具克服了传统模具制造过程中成本高、耗时长等缺点,逐渐受到模具制造领域的青睐。但是,已报到的可牺牲模具只能使用一次,降解的废液同样难以处理。本工作利用COIT-T30材料快速固液转化和可循环打印性能,实现了3D打印牺牲模具的循环打印。并且利用材料在乙醇中的溶胀特性,同时实现了室温脱模。 图4 可循环3D打印牺牲模具高价值的功能性填料经常被添加到树脂基体中打印特定功能的模型,其中高价值填料的无损回收具有十分重要的意义。温致变色微胶囊可赋予打印模型温致变色的功能。然而,小分子溶剂及高温(T>180 ℃)非常容易导致微胶囊破裂,从而失去变色能力。因此,温致变色微胶囊的回收是一个巨大的挑战。本工作利用温致变色微胶囊在弱碱性溶剂及油脂中十分稳定的特性,成功实现了温致变色微胶囊的无损回收及可循环利用。连续回收3次后,温致变色微胶囊及树脂基体的性能与原始微胶囊及树脂基体基本一致。 图5 温致变色微胶囊的无损回收利用几种不同温度响应的温致变色微胶囊与COIT-T30复配,打印出温致响应的图案,可用于信息的加密或防伪。温致变色微胶囊与打印树脂具有非常好的相容性,打印图案具有非常好的温致变色灵敏性和稳定性。随着温度的升高(22 ℃),可显示不同的信息,实现信息的解密。当温度高于65 ℃或低于22℃时,所有信息均隐藏,实现信息的加密。此外,利用COIT-T30打印材料的快速固液转化性能,实现了多种温致变色微胶囊的无损回收及循环利用。 图6 温致防伪图案的打印综上所述,本文首次利用解离型动态共价键实现了光固化3D打印材料的快速固液转化及可循环光固化3D打印,有望解决传统光固化3D打印材料带来的资源浪费和环境污染等问题。同时,首次实现了牺牲模具和温致变色材料的循环3D打印,尤其是变色微胶囊的无损回收及再利用。该工作为可循环光固化3D打印的材料研究提供了新思路。文章链接:https://doi.org/10.1016/j.cej.2022.139401摩方精密作为微纳3D打印的先行者和领导者,拥有全球领先的超高精度打印系统,其面投影微立体光刻(PμSL)技术可应用于精密电子器件、医疗器械、微流控、微机械等众多科研领域。在三维复杂结构微加工领域,摩方团队拥有超过二十年的科研及工程实践经验。针对客户在新产品开发中可能出现的工艺和材料难题,摩方将持续提供简易高效的技术支持方案。来源:高分子科技官网:https://www.bmftec.cn/links/10
应用实例
2022.11.15
湖南大学王兆龙团队:3D打印制备仿生超疏水微结构用于微液滴操纵
自然界中的生物体为了能够很好地适应外界环境,在不断进化中拥有了自己独特的能力。早在宋代就有诗词“出淤泥而不染,濯清涟而不妖”,这其中描述的是“荷叶效应”——荷叶表面由于具有特殊排列的微纳米结构而表现出对水的排斥,这种现象被称为超疏水现象。由于具有超疏水结构的表面在自清洁、抗腐蚀、流动减阻、油/水分离、微反应器和液滴操纵等领域具有较强的应用潜力。因此,通过“师法自然”的方法来设计并且制备出具有超疏水结构的仿生表面发展迅速。科研工作者们已经研究开发了许多制取具有超疏水性质的表面的方法,然而想精确制备具有复杂形状的仿生微结构的方法却不容易,并且通过单独控制微结构的尺寸来精确控制表面的亲疏水性质也极其重要。弹尾虫是一种依靠皮肤进行呼吸的节肢类昆虫,喜爱生活在阴暗潮湿的环境中,为了适应环境,弹尾虫在长期的进化中在表皮逐渐形成了微蘑菇结构,这种结构使得弹尾虫具有超疏液的性质。受此启发,湖南大学王兆龙助理教授、段辉高教授与上海交通大学郑平院士合作,基于面投影微立体光刻3D打印技术制备了具有微蘑菇结构阵列的超疏水表面,液滴在该表面的接触角达到了171°,并且展现花瓣效应。图1 仿生超疏水结构的设计及制备(A-C)弹尾虫光镜图及其表皮结构的扫描电子显微镜图(D-E)面投影微立体光刻3D打印技术原理图(F-H)3D打印平板、圆柱以及微蘑菇结构的的浸润性对比(I)花瓣效应通过工艺参数优化,该团队通过精准调控微结构的尺寸和间隙等物理特征参数对表面的浸润性实现了可控调节,液滴在其表面上的接触角可以从55°~171°变化。并且通过控制微蘑菇的高度有效调控表面与水滴的粘附力在71uN~99uN之间变化。图2. 通过精确控制微蘑菇的茎的直径(d)、高度(h),蘑菇头的直径(D)、高度(H)以及相邻蘑菇的间隙(G)可控调节表面的润湿性。图3. 3D打印制备的超疏水微蘑菇结构应用于(A)微液滴化学反应(C)液滴无损转移(D-F)液滴的可控融合(B)不同结构表面对水滴的粘附力在此基础上,团队利用制备的仿生超疏水表面实现了微液滴的定向转移和可控融合,搭建了可用于微液滴化学反应的反应台。相关研究成果在生物医疗、分析化学以及微流控等领域具有重要的应用前景。相关成果以题为3D-Printed Bioinspired Cassie–Baxter Wettability for Controllable Micro-droplet Manipulation的论文发表在ACS Applied Materials & Interfaces上。其中论文的第一作者为湖南大学机械与运载工程学院硕士生尹球,共同第一作者为上海交通大学博士生郭晴以及湖南大学王兆龙助理教授,共同通讯作者为湖南大学王兆龙助理教授、段辉高教授及上海交通大学郑平院士。原文链接:https://pubs.acs.org/doi/10.1021/acsami.0c18952来源:高分子科技官网:https://www.bmftec.cn/links/10
应用实例
2022.11.14

北航: 具有高运动精度和高输出力的可变形磁流体机器人
在生物医学研究中,对生物颗粒(如细胞和生物组织)的操作,特别是捕获和运输,是各种生物应用的基础。许多工具和驱动系统被设计用来提高操作的准确性和效率。磁驱动机器人具有精确操纵粒子或生物组织的能力,在生物医学、生物工程和生物物理学领域具有重要的潜力。然而,具有预定形状的刚性机器人的变形能力是有限的,这限制了其在狭小的空间的运动。 近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授等研发了一种可变小型机器人,该机器人是利用具有磁性和流体性质的铁磁流体这一新型材料所研制的。该磁流体基机器人不仅可以根据不同的磁场的分布形成不同的形状,从而完成不同的任务;并且还可以借助于操作平台的疏水处理,使得磁流体基机器人与基板间的摩擦减小,进而简单高效地提高了机器人的实际输出力。图1. 通过多种形状的永磁铁产生的集中磁场改变磁流体形状进而达到搬运不同模块的目的为了证明这种磁流体基机器人所具有的且刚性机器人所欠缺的实际应用能力,作者设计了几个验证实验:1.制造不同形状的永磁体并磁化,观察不同磁场下磁流体基机器人的变形情况;2. 打印不同形状的模块,测试磁流体机器人的搬运能力;3.打印狭缝,测试机器人穿越窄缝的性能。通过采用PμSL 3D打印技术(nanoArch S140,摩方精密),实现了验证实验中的搬运模块、永磁模具及狭缝的精密制造。图2. 永磁体的制造流程及磁流体基机器人的变形图3. 磁流体基机器人在平面上的三自由度运动图4. 磁流体基机器人穿越狭缝动画及实物演示该项研究成果获得国家重点研发计划(No.2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持,以“Deformable ferrofluid-based millirobot with high motion accuracy and high output force”为题发表于国际期刊《Applied PhysicsLetters》(北京航空航天大学陈迪晓硕士为第一作者)。官网:https://www.bmftec.cn/links/10
应用实例
2022.11.11
北大段慧玲教授课题组在水下仿生固液气界面力学方面取得重要进展
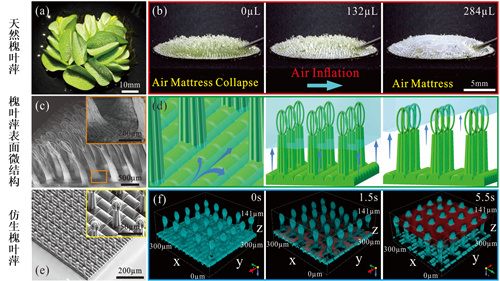
附着在水下固体表面微结构上的液气界面具有减小流动阻力、防止化学腐蚀、防止生物粘附等诸多优良特性,在水下航行体、管道流体运输、化工等领域具有重要的应用前景。在自然界中,很多水生动植物通过在其表面微结构上附着液气界面,维持水下呼吸和光合等生命过程的进行。“师法自然”,通过研究水生生物表面微结构与液气界面的相互作用机理,仿生设计和制造出水下稳定的固液气界面具有重要的科学意义和工程价值。 北京大学工学院段慧玲教授课题组通过研究具有极强环境适应能力的水生蕨类植物——槐叶萍(图1a),发现其表面特殊微结构具有极强的稳定液气界面能力(图1b);通过仿生学原理与稳定性分析,揭示了槐叶萍表面微结构的设计原则(图1c)与其表面气层稳定性的力学机制(图1d);通过3D打印技术,制造了人工仿生槐叶萍表面(图1e),完全实现了天然槐叶萍的稳定液气界面的功能(图1f)。该研究成果于2月4日以封面文章形式刊登在《美国科学院院刊》(Proceedings of the National Academy of Sciences of the United States of America)上(图2),题为“Superrepellency of underwater hierarchical structures on Salvinia leaf”。图 1. (a), (b) 天然槐叶萍与槐叶萍表面附着的液气界面,(c), (d) 天然槐叶萍表面微观结构与液气界面稳定性机理,(e), (f) 仿生制造槐叶萍表面微观结构与液气界面 水下固液气界面在大压强、高流速,以及气体扩散等因素的影响下,易发生失稳甚至消失,这严重影响了水下生物的生存条件以及固液气界面的工程应用。研究水下固液气界面稳定性机制,研制稳定性高的水下固液气界面材料和结构是该领域最重要的基础研究课题之一。 段慧玲教授课题组通过研究槐叶萍表面的微结构及其水下固液气界面力学特性,发现了一种新的水下固液气界面稳定性机理,这归因于其特殊的表面微结构(图1c)。继而,基于仿生学原理及力学设计理论,利用3D打印技术制造了人工仿生槐叶萍表面(图1e),为固液气界面设计制造提供了新的设计准则和研究方法。本研究对固液气界面在水下,尤其是大水深、高压强等极端环境下的应用提供了新的设计思路。图 2. 《美国科学院院刊》2020年第5期封面 (https://www.pnas.org/content/117/5.cover-expansion) 段慧玲教授课题组过去多年一直致力于水下固液气界面力学研究,并取得了一系列成果 (Extreme Mech. Lett. 27, 34, 2019; Phys. Rev. Lett. 119, 134501, 2017; Phys. Fluids 29, 032001, 2017; Phys. Rev. Lett. 112, 196101, 2014.)。此外,在国际应用力学权威综述期刊应邀发表综述论文(Appl. Mech. Rev. 68, 030803, 2016),并获得美国机械工程师协会The Lloyd Hamilton Donnell Applied Mechanics Reviews Paper Award (2016)。 段慧玲教授课题组相耀磊博士为本论文第一作者,段慧玲教授为本文通讯作者。本研究工作得到了国家自然科学基金的支持。 论文链接:https://www.pnas.org/content/117/5/2282?iss=5来源:中国聚合物网
应用实例
2022.11.10
哈工大(深圳)魏军团队 AFM综述:3D打印超级电容器 - 技术、材料、设计及应用
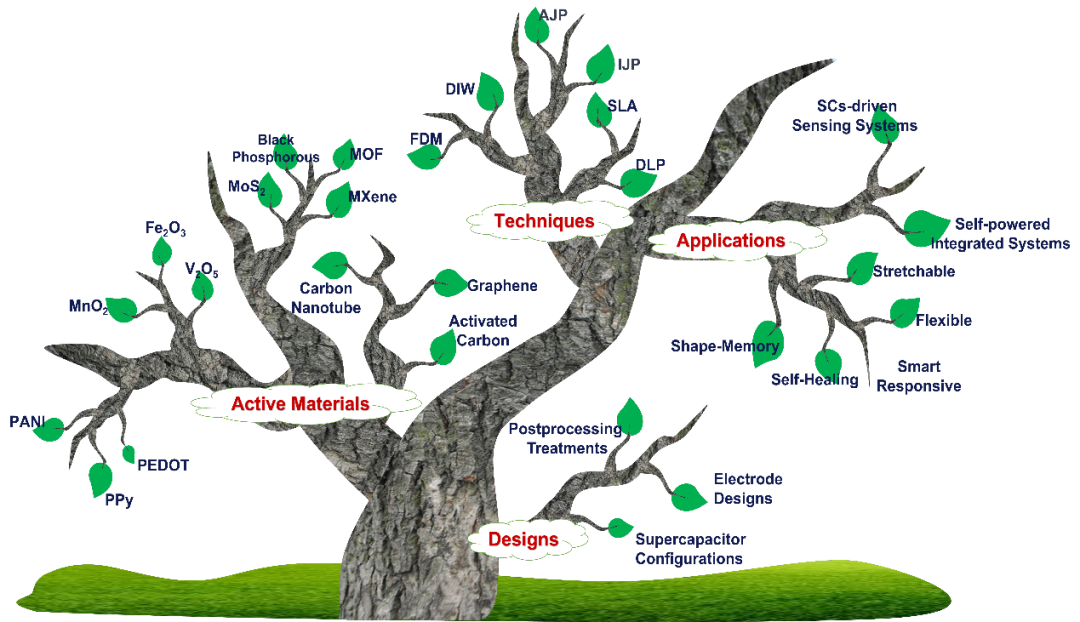
便携式、柔性和可穿戴电子设备的发展促进了高性能的电化学储能设备的快速发展。与电池和燃料电池相比,超级电容器表现出显著的优势,具有优异的倍率性能、杰出的循环寿命和卓越的安全性。然而,超级电容器的能量密度相对较低,不足以为电子设备提供连续且稳定的电源。为了提高能量密度,厚电极设计是有效的手段。而在传统的三明治结构的超级电容器中,平面电极的活性材料质量负载是相当有限的。设计三维多孔电极可以有效地提高活性物质的质量负载,同时保持较短的离子/电子传输距离和快速的反应动力学。但传统的制备三维多孔电极的方法通常复杂、昂贵、耗时,并且很难精确控制电极的结构。3D打印技术,通过计算机辅助设计/制造模型,对预定义的3D模型进行数字化控制,使得在短时间内精确控制和制造复杂结构成为可能。区别于传统的等材和减材制造技术, 3D打印技术可以实现几乎任何所需的立体几何形状,不需要所谓的模具或光刻掩模。这使得打印的超级电容器具有可调整的几何结构、高度集成、节省时间和低成本、以及卓越的功率和能量密度。为了总结这一领域的最新进展并为未来的研究提供设想,来自哈尔滨工业大学(深圳)的魏军教授团队,在Advanced Functional Materials上发表题为“3D Printed Supercapacitor: Techniques, Materials, Designs and Applications”的综述文章,回顾了3D打印超级电容器的最新进展,如图1所示。 图1. 3D打印超级电容器研究进展首先,介绍了用于制备超级电容器的代表性的3D打印技术,不同技术的原理图和特点如图2所示。 图2. 制备超级电容器的各种3D打印技术的原理图和特点接下来,文章重点介绍了超级电容器的可打印模块,包括电极、电解液和集流体,如图3所示。 图3. 用于3D打印超级电容器的材料在研究合适的可打印材料的同时,制造中的打印设计对于优化超级电容器的性能也是重要的。因此,文章总结了电极的设计(图4)、打印电极的后处理,并概括了3D打印超级电容器的不同构型(图5)。图4. 3D打印电极的不同结构设计 图5. 3D打印超级电容器的构型此外,还总结了3D打印超级电容器的各种应用,包括柔性可穿戴电子设备(图6)、自供电集成电子设备和传感系统(图7)。 图6. 不同类型的智能响应型超级电容器 图7. 3D打印的自供电集成系统,和超级电容器驱动的传感器系统。如图8可知,目前制备的3D打印超级电容器的能量密度与铅酸、镍氢电池和锂电池相当,有的甚至更高。 图8. 3D打印超级电容器的 (a)质量Ragone图, (b) 面积Ragone图最后,总结了目前3D打印技术的局限性和未来3D打印超级电容器的研究面临的挑战,并提出了一些可能的研究方向。 图9. 3D打印超级电容器的未来展望文章信息:Mengrui Li, Shiqiang Zhou, Lukuan Cheng, Funian Mo, Lina Chen,* Suzhu Yu,* Jun Wei,* 3D Printed Supercapacitor: Techniques, Materials, Designs and Applications, Advanced Functional Materials, 2022, 202208034.原文链接:https://doi.org/10.1002/adfm.202208034团队负责人简介向上滑动阅览魏军教授,现任哈尔滨工业大学(深圳)校长助理、深圳市柔性印刷电子技术重点实验室主任、柔性印刷电子技术中心主任、材料科学与工程学院教授。在加盟哈尔滨工业大学(深圳)之前,魏军教授是新加坡科技研究局(A*STAR)首席科学家。先后担任新加坡科技研究局“工业增材制造”主题战略研究计划主任和项目负责人、新加坡制造技术研究院-南洋理工大学“增材制造”联合实验室主任、新加坡制造技术研究院-新加坡国立大学“大面积柔性复合电子联合实验室”主任、新加坡制造技术研究院柔性印刷电子研究室和连接技术研究室主任等职务。从事先进材料和制造技术基础理论和工业应用研究三十多年,曾主持160多项研究课题以及和企业合作的项目,多项研究成果已被多家跨国公司实现产业化应用。目前主要从事纳米材料和器件、柔性印刷电子和增材制造(3D打印)研究工作,在国际期刊和会议上发表论文800余篇,其中SCI收录500余篇,论文被引2.5万余次,谷歌学术H指数80,受邀参编5部英文专著,拥有发明专利80余项。摩方精密简介摩方精密作为微纳3D打印的先行者和领导者,拥有全球领先的超高精度打印系统,其面投影微立体光刻(PμSL)技术可应用于精密电子器件、医疗器械、微流控、微机械等众多科研领域。在三维复杂结构微加工领域,摩方团队拥有超过二十年的科研及工程实践经验。针对客户在新产品开发中可能出现的工艺和材料难题,摩方将持续提供简易高效的技术支持方案。来源:高分子科技该文章转载的目的在于传递更多信息,如涉及作品内容、版权或其它问题,请于我司联系,我们将在第一时间删除内容!
应用实例
2022.11.08
基于面投影微立体光刻3D打印技术的共形压电传感器设计与制造
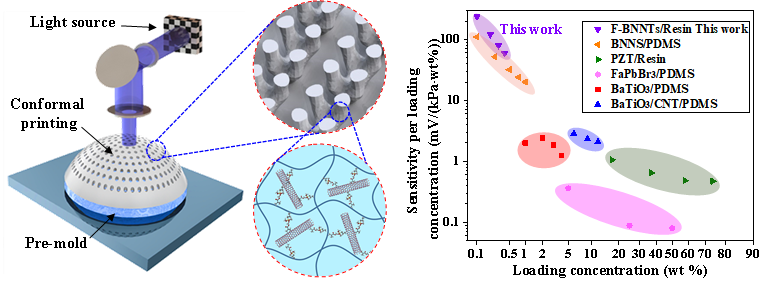
随着柔性电子领域的快速发展和物联网技术的普及,能够用来监测人类生理指标(如心跳、脉搏、运动周期、血压等)和机械运行状态(如主轴跳动、机器人运动状态感知等)信号的可穿戴电子器件逐渐应用到社会生活中。可穿戴电子器件的共形设计和制造使其在电子皮肤、柔性传感和人工智能中具有潜在的应用前景。当前,大多数电子器件是利用光刻、压印技术和电子束在硅表面进行制备。然而由于缺乏弯曲表面的加工工艺,要制备与复杂曲线表面(例如人体关节)共形的电子器件尤为困难。面投影微立体光刻3D打印技术(PμSL)可快速制造并成型任意形状和可设计的结构,为三维共形柔性电子器件的制造提供了灵活性和简便性。然而,考虑到柔性材料的成型工艺与功能特性,传统的制造工艺限制了功能材料的设计范围,降低了微结构的设计与成型尺度,制约了功能器件的成型和性能提升的范围。图1 论文工作的摘要图近日,西安交通大学机械工程学院陈小明、李宝童、邵金友教授等研究人员,从功能压电纳米复合材料的改性与压电器件的微结构拓扑优化等两方面出发,利用面投影微立体光刻3D打印技术(nanoArch S140,10μm精度,深圳摩方),通过设计并调节压电氮化硼纳米管材料(BNNTs)和光敏聚合物树脂的界面相容性,结合拓扑优化微结构方法,实现了具有高灵敏度、宽响应,且结构可覆形的柔性压电传感器制造。该研究以“3D printed piezoelectric BNNTs nanocomposites with tunable interface and microarchitectures for self-powered conformal sensors”为题发表在国际高水平期刊《Nano Energy》上,为高性能可穿戴柔性压电传感器件的设计与制造提供了新思路。工作要点一:功能纳米复合材料(BNNTs)的表面改性与材料制备,超低负载量(0.2wt%)的纳米复合材料表现出出色的压电性能:图2 功能纳米复合材料(BNNTs)的设计、改性与表征:a)BNNTs表面功能化工艺;(b)原始BNNTs/功能化BNNTs和树脂基体界面力学行为示意图;(c)极化与未极化BNNTs等压电输出信号为了提高压电纳米填料在有机聚合物溶液中的相容性和分散性,以及纳米复合材料的压电性能,通过用硝酸处理来实现纳米管表面的氧化和羟基形成,在超声处理下,官能化分子(TMSPM)与BNNT-OH表面的官能团嫁接,生成化学官能化的纳米管(F-BNNTs)。同时,纳米管上的丙烯酸酯基团显着提高了BNNTs在聚合物基体溶液中的分散性及压电输出;实验表明:相对于原始BNNTs,基于F-BNNTs的复合压电聚合物的压电输出提高了140% (见图2)。工作要点二:结构拓扑优化显著提高了复合材料的压电性能,微结构的纳米复合膜在较宽的响应区域上展现出高灵敏度; 课题组研究人员的前期研究工作表明,微结构化能显著提升压电器件的输出信号(Small 13 (23), 1604245;Nano Energy 60, 701等)。因此为了实现器件电信号输出的最大化,本文采用结构拓扑优化的方法优化压电膜的微观结构,并利用高精度面投影微立体光刻3D打印的微尺度加工能力,实现拓扑微结构的制造。数值模拟结果表明,微结构的引入能显著提高压电输出,并且具有优化微结构(struct B-P 和struct C-P)的压电薄膜能进一步提高信号输出(见图3)。图3 平面和微图案化压电薄膜的设计和仿真结果通过微结构3D打印拓扑结构及压电信号测试,表明F-BNNTs /树脂复合膜的最大输出电压记录为4.7 V,与原始的平面F-BNNTs压电膜相比,输出提高了4.3倍,比未官能化的BNNTs基复合膜高出10倍。这种显著增强主要归因于聚合物和压电填料之间有效应力传递,以及复合膜的拓扑微结构设计。图4 (a-f)不同微结构压电薄膜;(g)薄膜压电输出;(h)压电微结构薄膜的压电输出实验与仿真对比工作要点三:基于PμSL技术实现共形压电器件制造与应用;与传统的微加工方法相比,面投影微立体光刻3D打印技术在设计和制造具有复杂几何形状的共形电子器件上具有更大的灵活性,如图5所示,曲面形状和微结构的制造证实了功能材料在复杂表面上的非平面制造能力。图4 (a)面曝光3D打印原理;(b)微结构化的共形薄膜示意图可打印压电材料被用于构造机器人手的智能触觉应变传感器。为了确保压电器件在弯曲或不平坦表面上的功能性,根据机械手的表面设计了合适的3D模型,然后将共形器件打印并安装到机械手不同的指骨上,通过建立应变感应电压与特定手部姿势的映射关系,手指上的应变传感器阵列可为机械手提供触觉感测的能力。图5(a–d)机械手上的共形应变传感器可转换不同的姿势,例如松弛(a),抓取(b),吊勾(c)和托平(d);(e)从托举球到抓紧球的姿势以及相应的电压响应(f)。如图5所示,手指上的应变传感器阵列可以使用14个压电应变传感器直接转换手的姿势,当用手握住不同结构的物体时,应变传感器会记录弯曲手指的不同输出信号。从预定义的传感器中获得的针对这种姿势的力的大小及其空间分布。3D打印的共形柔性压电传感器件可用于捕获接触区域上的力分布并监视机械手的不同运动,使其更能像人手一样具备相关功能,在人机交互中应用。本研究提出了一种面投影微立体光刻3D打印功能化纳米复合材料实现功能器件制造的方法,并通过材料改性与微结构设计两方面协同提升信号输出。研究结果表明:在光固化聚合物树脂中掺杂低负载量(0.2 wt%)的功能化氮化硼纳米管,并进行微结构拓扑优化,可实现高性能压电器件的制造。该方法制备的传感器在智能机器人、仿生电子皮肤、曲面结构件健康检测与人机接口等领域有广泛的应用前景。
应用实例
2022.11.07
【期刊集锦】关于3D打印的相关研究报导
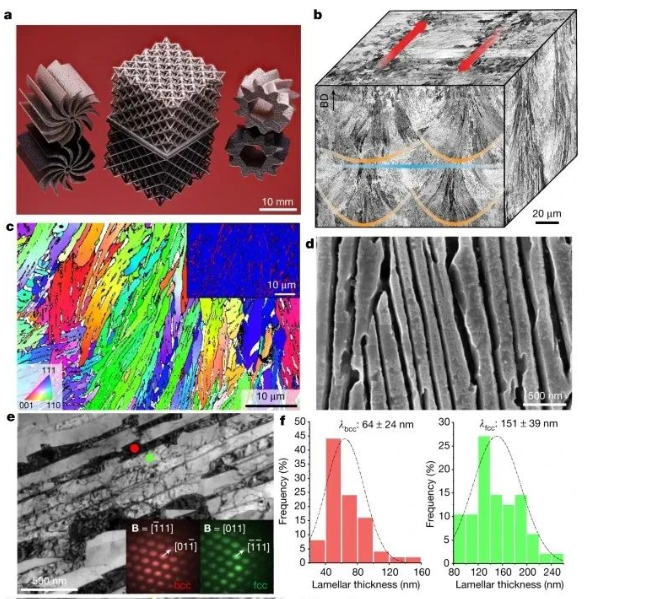
3D打印技术因其避免了传统制造业的切割程序以及无需模具的制造即可实现快速制备的特点,尤其是在制造复杂结构、微尺度模型时,具有更大的优势,已经广泛应用众多领域的小批量加工。各领域专家学者对3D打印的技术及应用探索研究络绎不绝,并有众多优异的创新成果不断涌现。本文仅列举了近期的订刊收录的少许成果,以供大家共同探讨。Nature:3D打印制造高强度和高韧性的纳米层状高熵合金提出利用激光粉床熔合技术制作双相纳米层状高熵合金(HEAs),这种3D打印的共晶高熵合金具有高强度和良好的延展性以及几乎各向同性机械性能。论文信息:Jie Ren, Yin Zhang, Dexin Zhao, Yan Chen, Shuai Guan, Yanfang Liu, Liang Liu, Siyuan Peng, Fanyue Kong, Jonathan D. Poplawsky, Guanhui Gao, Thomas Voisin, Ke An, Y. Morris Wang, Kelvin Y. Xie, Ting Zhu&Wen Chen.Strong yet ductile nanolamellar high-entropy alloys by additive manufacturing.nature,2022,8.原文链接:https://doi.org/10.1038/s41586-022-04914-8Materials Today:纳米纤维素实现3D打印可变形电极和隔膜使用混合了纳米原纤化纤维素的活性材料,通过挤压的3D打印方法,制造了用于锂离子电池的可拉伸蛇形电极和隔膜,得到的电极和隔膜经过50次50%的拉伸循环后,电极电阻仅增加3%。论文信息:Ji Qian,Qiongyu Chen, Min Hong, Weiqi Xi, Shuangshuang Jing,Yinhua Bao, Gang Chen,Zhenqian Pang, Liangbing Hu, Teng Li. Toward stretchable batteries: 3D-printed deformable electrodes and separator enabled by nanocellulose.Materials Today,2022,4.原文链接:https://doi.org/10.1016/j.mattod.2022.02.015Advanced Materials:3D打印个性化神经导管,用于精确修复周围神经缺陷系统总结了用于周围神经再生(PNR)的不同类型3D打印NGCs的原理、材料基质、设计特点、性能以及优缺点,介绍了个性化3D打印NGC在周围神经缺损精准修复中的应用,并预测了其未来发展方向。论文信息:Kai Liu,Lesan Yan,Ruotao Li,Zhiming Song,Jianxun Ding,Bin Liu,Xuesi Chen. 3D Printed Personalized Nerve Guide Conduits for Precision Repair of Peripheral Nerve Defects. Advanced Science.2022.9(12):2103875.原文链接:https://doi.org/10.1016/j.actbio.2022.01.042Nature materials: 3D打印蛋白质机器人分子马达3D打印制备了一种新型的蛋白质微机器人,该机器人可通过肌动球蛋白由内向外驱动机器人运动,可与软物质结合实现复杂的机械任务。论文信息:Haiyang Jia , Johannes Flommersfeld, Michael Heymann , Sven K. Vogel1, Henri G. Franquelim , David B. Brückner , Hiromune Eto , Chase P. Broedersz and Petra Schwille.3D printed protein-based robotic structures actuated by molecular motor assemblies. Nature materials,2022,5.原文链接:https://doi.org/10.1038/s41563-022-01258-6Nature Communications: 3D打印助力各向同性结构颜色的光子胶体玻璃将含有单分散二氧化硅颗粒、炭黑及凝胶共聚物通过3D打印的方式制备了显示各向同性结构颜色的光子胶体玻璃,且通过控制打印条件可以调节颜色。论文信息:Ahmet F. Demirörs, Erik Poloni, Maddalena Chiesa,Fabio L. Bargardi, Marco R. Binelli, Wilhelm Woigk, Lucas D. C. de Castro, Nicole Kleger, Fergal B. Coulter, Alba Sicher,Henning Galinski , Frank Scheffold & André R. Studart. Three-dimensional printing of photonic colloidal glasses into objects with isotropic structural color.nature communications,2022,7.原文链接:https://doi.org/10.1038/s41467-022-32060-2Nature Communications: 3D打印高强韧仿生结构镁钛互穿相复合材料通过3D打印Ti-6Al-4V支架,然后用Mg无压渗透形成Mg-Ti复合材料,并设计和制备了三种仿生结构,其中交叉层状结构在增强材料、离域损伤和抵抗裂纹扩展方面最有效。论文信息:Zhang, M., Zhao, N., Yu, Q. et al. On the damage tolerance of 3-D printed Mg-Ti interpenetrating-phase composites with bioinspired architectures. Nature Communications. 2022,13:3247.原文链接:https://doi.org/10.1038/s41467-022-30873-9摩方精密作为微纳3D打印的先行者和领导者,拥有全球领先的超高精度打印系统,其面投影微立体光刻(PμSL)技术可应用于精密医疗器械、微流控、微机械等众多科研领域。在三维复杂结构微加工领域,摩方团队拥有超过二十年的科研及工程实践经验。针对客户在新产品开发中可能出现的工艺和材料难题,摩方将持续提供简易高效的技术支持方案。
应用实例
2022.11.04
西南科大仿生微纳精密制造团队:精密3D打印构建仿生麦芒分级系统用于高效雾水收集
雾水收集对解决水资源短缺具有重要的意义,如何提升雾水收集效率一直是研究热点。高效的雾水收集需要同时满足高效捕捉和快速传输两个严苛的条件。受大自然启发,制备合适的仿生系统被认为是实现这两个严苛条件的有效方法。然而,目前制备的仿生系统结构单一,精度较低,无法实现高效的雾水收集。近日,西南科技大学李国强教授领导的仿生微纳精密制造团队,受小麦麦芒启发,利用PμSL3D打印技术(深圳摩方材料科技有限公司,nanoArch® S130)构造了仿生麦芒分级系统,实现了高效的雾水收集。经过优化设计的仿生麦芒雾水收集系统,表面分布有众多微型刺状取向收集器,扩大了收集的有效面积,增强了雾滴捕捉效率,并突破传统结构下滴状传输的限制,实现了高速的膜状传输,极大地提高传输速度和收集效率。该系统的水雾收集效率可达5.9g/cm2·h,有望应用于液滴传输、药物运输、细胞牵引、海水淡化等科学技术领域。图1 自然麦芒结构特征、雾水收集过程及仿生麦芒系统的制备过程。a.小麦麦芒捕捉潮湿空气中的小水滴。b.麦芒逆重力超快雾滴输运过程。c-e. 自然麦芒的分级结构SEM表征。f. PμSL 3D打印系统制备仿生麦芒分级系统的示意图。图2 自然麦芒与仿生麦芒的结构特征及演变规律。a-c.自然麦芒表面微刺、凹槽的结构特征统计曲线图。d-e.5种不同结构形式仿生系统示意图。f-g. 不同结构形式仿生系统的表征。h.仿生麦芒随微刺数目增加的结构演变示意图。要点:小麦麦芒可从潮湿空气中捕捉微小雾滴作为水分供给。这种高效的雾水收集能力主要是源于表面的锥形脊柱、梯度凹槽、方向性刺集成的分级微纳系统。通过对结构特征的分析,借助PμSL打印技术的高精度性、自由性对结构进行拆解、重新整合,并根据结构的演变过程优化构建模型,编程调控制备了不同结构形式的仿生系统,包括仿生脊柱系统(A-spine)、仿生凹槽系统(A-grooves)、仿生麦芒系统体系(A-awn-2、A-awn-3、A-awn-4)。图3 不同结构形式仿生麦芒的雾水收集过程。a-e. 仿生脊柱(Ⅰ)、仿生凹槽(Ⅱ)、仿生麦芒体系(Ⅲ、Ⅳ、Ⅴ)在水雾环境下逆重力的雾滴捕捉输运过程。图4 仿生麦芒的水雾收集作用机理。a-c. 仿生脊柱(Ⅰ)、仿生凹槽(Ⅱ)、仿生麦芒体系(Ⅲ、Ⅳ、Ⅴ)逆重力下的雾滴运输距离、速度、体积的统计曲线图。d-f. 仿生脊柱、仿生凹槽、仿生麦芒体系的雾水收集机理分析。要点:通过在水雾环境下观察,在仿生脊柱与仿生凹槽结构表面,雾滴以大液滴的形式进行定向地输运——滴状传输。但在仿生麦芒系统体系表面,无明显大液滴出现,相反雾滴是以一层薄水膜进行定向输运——膜状传输。液体传输模式的转变主要是受表面微结构所影响。脊柱与凹槽单级仿生结构系统,难以实现对雾滴快速高效的捕捉,无法在表面形成连续稳定的液体薄膜,所捕捉液滴易受周围液滴的吸引合并成大液滴进行传输。当其体积增大到某数值时,结构所产生的拉布拉斯力无法继续驱动液滴运动,最终钉扎在表面。而仿生麦芒分级系统体系,由于表面附加了众多的微型刺状取向收集器,增强了雾滴捕捉能力,实现快速的润湿过程,在表面形成连续稳定的液体薄膜。且与表面其他微滴合并凝结相比,微滴在水膜表面滑动的所需时间更短,因此更倾向于沿水膜表面运动,使得传输速度和收集效率得到显著的提升。实验结果表明,膜状传输的速度要比滴状传输高40倍,可实现3.5 mm/s的传输速度和 5.9 g /cm2·h的收集效率。该工作以 “Programmable 3D printed wheatawn-like system for high-performance fogdropcollection” 为题发表在国际著名期刊《Chemical Engineering Journal》上。该项工作得到了国家自然科学基金委、四川省科技厅等基金项目的支持。
应用实例
2022.11.03
仿松针多级非对称结构超疏水表面多尺度液滴定向输运
液滴的自发定向输运在芯片实验室、能源电力系统、油气输运、水收集和除湿等领域具有广泛的应用前景,其主要取决于表面形貌结构和化学组成的非对称性,具体表现为浸润性梯度、各向异性结构和曲率梯度等。液滴输运的速度和距离是判定输运效率的有效指标。合理的设计并制备表面结构是实现快速、长程的液滴自发定向输运的有效方法。然而,传统的加工技术加工精度较低、加工结构单一,很难满足结构性能要求。近日,大连理工大学冯诗乐副教授,受松针表面多级非对称结构启发,使用深圳摩方材料科技有限公司PμSL 3D打印技术(nanoArch® S140),制备了仿松针多级非对称结构表面,实现了快速、长程的液滴自发定向输运。该研究以“Tip-inducedflipping of droplets on Janus pillars: from local reconfiguration to globaltransport”为题发表在国际顶级期刊《ScienceAdvances》上,为液滴的定向输运领域的发展提供了新的思路。论文第一作者为大连理工大学冯诗乐副教授,通讯作者为香港城市大学王钻开教授和巴黎高等物理化工学院David Quéré教授。图1 松针和仿松针多级非对称结构表面的形貌结构特征图2 仿松针多级非对称结构表面的形貌结构参数调控要点:研究者借鉴松针表面结构特征,设计并制备包括第一级的倾斜阵列结构、第二级的高度梯度结构和第三级的平面/曲面组合的半锥形结构的仿松针多级非对称结构表面。上述表面(图1)由nanoArch S140微尺度3D打印设备加工,使用材料为HTL耐高温树脂,打印层厚为10微米。阵列间距为300微米,尖锥倾斜角度β为70°,高度梯度α为20°,尖锥顶端大小为10-20微米。在打印过程中,通过精密刮刀刮除细小的气泡,来保障加工质量。同时,研究者还设计了仅包含倾斜阵列结构和半锥形结构的对照样品,与仅包含倾斜阵列结构和高度梯度结构的对照样品。通过nanoArch S140微尺度3D打印技术,实现了包括倾斜、高度梯度及平/曲面组合的复杂三维结构表面参数的精确调控及大规模制备(图2)。图3 仿松针多级非对称结构表面微液滴自发定向输运图4 仿松针多级非对称结构尖端效应要点:在凝结过程中,液滴先随机在表面凝结,然后向尖端汇聚,然后尖端液滴会在合并过程中重新配置,并从半锥形结构的平面旋转到曲面位置,随后合并的液滴会沿着高度增加的方向运动,进而实现从微观到宏观的多尺度液滴的定向输运,其液滴定向输运的速度可以达到10 cm/s。研究者发现液滴在合并过程中重新配置是非对称结构诱导的尖端效应导致的,并通过建立能量变化模型证明,当液滴尺寸大于结构尺寸时,液滴坐落于平面的系统能量大于坐落于曲面上的系统能量,从而揭示了液滴从平面向曲面运动的机理。研究者发现毫米级的液滴在合并过程中依然会从平面运动到弧面上,证明非对称结构诱导的尖端效应普遍适用于各种尺度的液滴。
应用实例
2022.11.02

西南石油大学朱一林课题组《 INT J MECH SCI 》:一种具有可调力学性能的新型单斜拉胀超结
具有负泊松比效应的拉胀结构是一类功能和结构一体化的力学超结构。由于反常规的负泊松比效应,拉胀超结构具有诸多独特的力学性能和广阔的工程应用前景。相较于缺失支柱胞元结构,手性拉胀结构(Chiral auxetics)可以在大应变下保持平滑的变形,并且对制造误差相对不敏感。缺失支柱胞元结构(missing rib auxetics)是一类典型的手性拉胀结构,可视为由传统手性拉胀结构的中心圆环替代为中心支架而成(图1)。 图1 传统手性及缺失支柱拉胀结构相较于传统手性拉胀结构,缺失支柱拉胀结构在大变形范围内具有更稳定的负泊松比响应,但由于中心支架缺乏有效支撑,其旋转效应无法得到充分发展从而拉胀性能较弱。为提高其结构刚度并获取可调范围更广的负泊松比,研究团队基于已有缺失支柱型结构发展了几种增强型结构,包括增强六手臂缺失支柱手性结构(Enhanced Hexa-missing rib)、增强三手臂缺失支柱反手性结构(Enhanced Anti-tri-missing rib)及增强四手臂缺失支柱反手性结构(Enhanced Anti-tetra-missing rib)。四手臂缺失支柱手性结构也是一种经典的缺失支柱胞元结构,并且由于对称性的缺失表现出独特的单斜性质(即:单轴拉伸/压缩时结构会产生耦合拉伸/压缩-剪切变形,如图2所示)。图2 传统四手臂手性拉胀结构(a)及四手臂缺失支柱手性拉胀结构(b)在单轴拉伸荷载下的变形图单斜特性对拉胀超结构力学性能的影响还鲜有报端。近期,西南石油大学朱一林副研究员团队发展了一种新型增强四手臂缺失支柱手性结构(Enhanced Tetra-missing rib,图3)。这种结构的单胞由两个”Z型”手臂及一个增强矩形框格组成,与团队之前发展的增强四手臂缺失支柱反手性结构(图1b)具有相同的基本单元(图3)。 图3 四手臂增强缺失支柱手性(a)及反手性(b)单胞结构为了确定可调的力学性能并为实际应用提供指导,研究团队基于卡氏定理推导了小变形下等效弹性常数的理论模型。由于单斜特性,推导等效弹性模量、泊松比和剪切模量时需要分别施加固定端部拉伸(fix-end uniaxial tension)荷载及固定拉伸的剪切(fix-tension shear)荷载。 图4 固定端部拉伸(a)及固定拉伸剪切(b)示意图通过调控结构的几何形状,即可获取大范围可调的力学性能(图5)。研究团队开展了系统的有限元计算(施加了周期性边界条件的单胞层面)。有限元计算结果与理论结果吻合度很高(图6),验证了理论推导的正确性。 图5 等效泊松比(a),弹性模量(b)及剪切模量(c)云图图6 理论及有限元分析等效弹性常数增强四手臂缺失支柱手性和反手性拉胀结构具有相同的基本单元,因此,研究团队对比了相同几何参数下两种结构的等效弹性模量和剪切模量(图7)。结果表明,单斜特性可显著增强结构的刚度,最高可达两个数量级。该研究成果为如何在不牺牲拉胀性能的同时提高拉胀结构的刚度提供了新的思路,具有重要的意义。 图7 增强四手臂缺失支柱手性及反手性胞元结构等效弹性模量及剪切模量对比此外,研究团队进一步通过结构层面的实验和有限元计算验证了理论公式的正确性。实验基体材料为HTL光敏树脂(弹性模量和屈服应力分别为0.6GPa和14MPa),试样利用微尺度3D打印机(nanoArch P150,摩方精密)制备,最薄处截面尺寸为0.15mm×1.0mm。结构层面的实验和有限元分析变形图吻合度很高(图8),并且弹性常数的理论结果与单胞层面的有限元分析结果、结构层面的有限元分析结果以及实验结果均吻合的很好(图9),进一步验证了理论公式的有效性。 图8 实验及有限元分析变形图 图9 理论、实验及有限元分析等效弹性常数该研究成果以“A novel monoclinic auxetic metamaterial with tunable mechanical properties”为题发表在国际权威期刊《International Journal of Mechanical Sciences》上。西南石油大学土木工程学院朱一林副研究员为第一及通讯作者;欧洲科学院院士、德国锡根大学结构力学系张传增教授为论文共同通讯作者;课题组硕士研究生江松辉、张祺,中国工程物理研究院总体工程研究所李建助理研究员,西南交通大学力学与工程学院于超教授为论文合作作者。该研究受到了国家自然科学基金、四川省科技厅国际合作项目、成都市科技局国际合作项目及国家留学基金的支持。
应用实例
2022.11.01
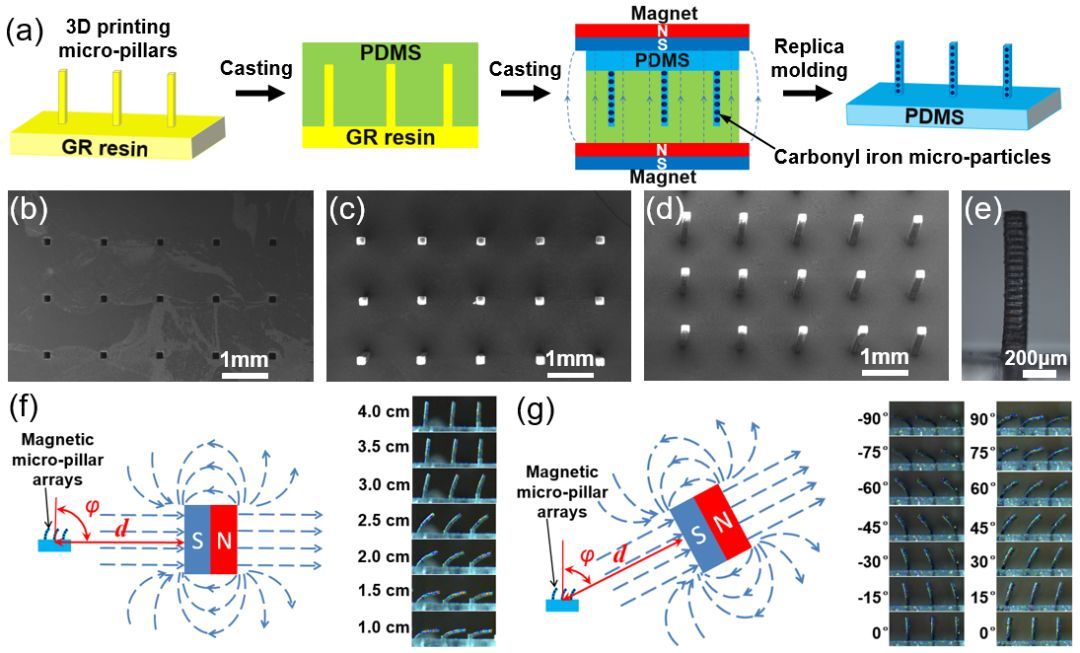
微纳3D打印结合二次翻模形成的微柱在磁场作用下实现定向可控变形
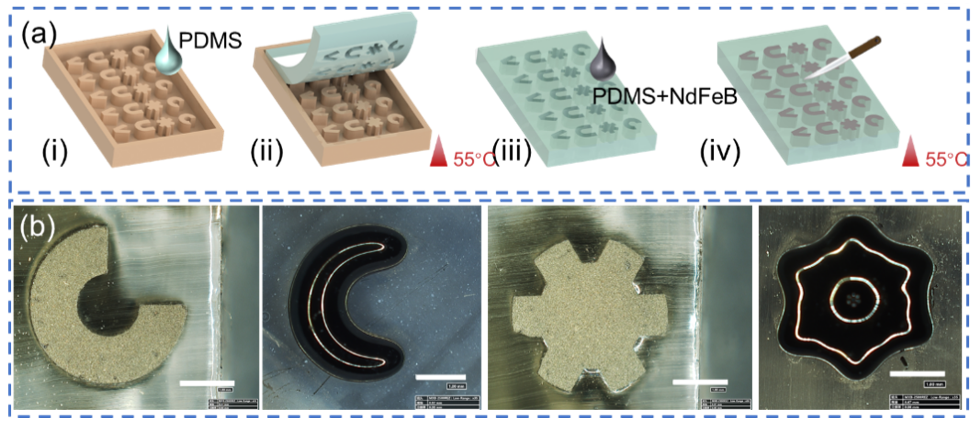
北京理工大学宇航学院的陈少华教授课题组柴泽博士,近日在知名期刊《Soft Matter》发表了一篇高质量文章“Controllabledirectional deformation of micro-pillars actuated by a magnetic field”。研究人员在实验过程中使用了深圳摩方材料科技有限公司微尺度3D打印设备S140,该设备具有10um精度的分辨率,94*52*45mm大小的三维加工尺寸。基于该设备加工了阵列的微柱结构,通过PDMS二次倒模形成含有磁性颗粒的PDMS微柱阵列,通过磁场控制来研究微柱变形,进而研究可逆粘附、可控润湿性和方向性表面输运等特殊功能性表面的设计和研究。微柱阵列(BMF nanoArch®S140 GR resin)填充磁性颗粒的柔性微柱阵列的制备工艺如图(a)所示,先通过深圳摩方(BMF)10μm精度的微立体光固化3D打印机S140打印出微米级别的微柱阵列,再倒模出纯PDMS孔洞模具,最后二次倒模获得含有磁性颗粒的PDMS微柱阵列;(b)PDMS模具的SEM图像,该模具的孔的大小与3D打印的微柱的大小相同;(c-d)从顶视图(c)和侧视图(d)观察的磁性颗粒填充的微柱阵列的SEM图像;(e)单根微柱;(f)夹角为90°时,永磁铁和微柱阵列表面之间具有不同距离的微柱变形形态;(g)距离一定时,磁体围绕固定微柱样品以半圆形旋转,微柱的变形形态。众所周知,可以通过改变微结构表面的形貌来设计特殊的表面功能。本文提出了一种通过旋转磁场控制微柱阵列方向变形的简单有效的方法。每个微柱的大变形可以通过磁场强度和方向来调整。当磁场强度固定时,微柱的变形方向由磁场方向控制。当确定磁场方向时,微柱的挠度随磁场强度的增加而增加。根据最小势能原理,进一步建立了揭示微柱大变形机理的理论模型。从理论上预测变形柱的形态与实验结果非常吻合。目前的实验技术和理论结果有利于典型功能性表面的设计和制备。例如,通过外场精准控制表面微结构的变形,实现目标表面界面粘附性和液体浸润性的可连续性调控,以及呈现梯度变化。为实现仿生壁虎脚设计,微纳器件转印,生物医学微液滴混合及方向性输运等提供技术支持。BMF nanoArch®S140System
应用实例
2022.10.31
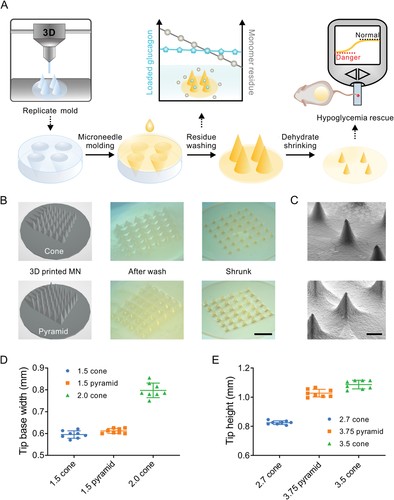
葡萄糖响应型胰高血糖素微针阵列贴片,用于低血糖无创治疗
低血糖是一种常发生在糖尿病患者的治疗过程中的副作用,较轻微时,会出现注意力不集中、出汗、心慌和视力变化等症状,可通过摄入碳水化合物解决,严重时,则会出现失去知觉、昏迷等症状,危及生命。因此,在这些不可预见的低血糖紧急情况下,需要及时补充胰高血糖素。采用安全、无痛无创的方式进行药物递送是解决上诉问题的理想方案。其中,微针阵列贴片是主要的候选方式。微针贴片由具有多功能特性的材料构成,其可以控制药物扩散动力学,实现按需给药。据麦姆斯咨询报道,近期,来自浙江大学顾臻团队的研究人员提出了一种结合3D打印技术和模具铸造技术的新型制造技术,制备了具有葡萄糖响应型胰高血糖素微针阵列贴片。该贴片可以预防胰高血糖素的物理和生物性失活,同时将有毒单体残留物消除到安全水平。相关研究成果以“Shrinking Fabrication of a Glucose-Responsive Glucagon Microneedle Patch”为题发表于Advanced Science期刊。具体而言,研究人员利用模具铸造工艺首先生成具有确定的形状和排列的相对较大的初步微针凝胶,然后进行脱水以最终实现尺寸小型化(图1A)。初始凝胶状过程可对微针形状、成型工艺和纯化进行轻松控制,而收缩步骤可确保保留小型化微针的形状细节和机械强度。为了测量整个收缩制造过程中的结构精度,使用商用3D打印机打印金字塔形微针框架,以复制PDMS模具。扩大到“毫米级”模具只需移液和超声处理即可快速浇注预冷聚合物溶液。纯化后,将凝胶状微针安装在透明的聚碳酸酯薄膜上并进行半密封以进行缓慢脱水,直到微针基底与聚碳酸酯薄膜分离。在收缩过程中,由于聚碳酸酯薄膜的稳定性,贴片的基部可以减少厚度,同时保持其原始尺寸和形状。类似地,每个微针尖端之间的中心距离保持不变,但微针尖端本身在水平和垂直方向上收缩以获得统一的预定义形状(图1B,C)。图1 葡萄糖响应型胰高血糖素微针阵列贴片制备过程而胰高血糖素递送响应于低葡萄糖水平的机制归因于CPAM/APBA聚合物网络的净电荷从阳离子到中性的转变(图2A)。当发生低血糖时,排斥性阳离子基质可以促进胰高血糖素的释放,随着血浆葡萄糖的增加,与APBA结合的葡萄糖分子数量的增加会导致更多的负电荷,以促进静电吸引(图2B),从而限制过量的胰高血糖素释放。图2 葡萄糖响应型胰高血糖素递送系统的机制和体外性能表征此外,研究人员还通过注射胰岛素以诱发胰高血糖素自动释放实验,进一步验证了该贴片的有效性。最后,研究人员验证了该贴片的长效稳定性,通过实验发现,在室温下保存的微针贴片在给药后显示出更好的提升血糖效果,并观察到微针贴片的稳定效果至少为4周。 图3 葡萄糖响应型胰高血糖素微针贴片的保护和保存评价论文链接:https://doi.org/10.1002/advs.202203274摩方精密作为微纳3D打印的先行者和领导者,拥有全球领先的超高精度打印系统,其面投影微立体光刻(PμSL)技术可应用于精密医疗器械、微流控、微机械等众多科研领域。在三维复杂结构微加工领域,摩方团队拥有超过二十年的科研及工程实践经验。针对客户在新产品开发中可能出现的工艺和材料难题,摩方将持续提供简易高效的技术支持方案。来源:微流控官网:https://www.bmftec.cn/links/10
应用实例
2022.10.28
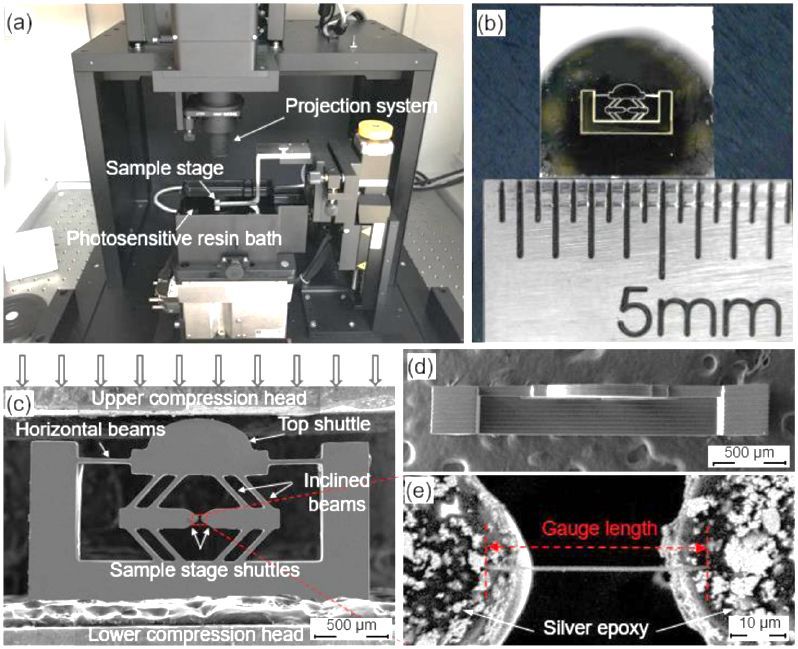
摩方精密 3D打印微机械器件 助力微纳力学表征
研究背景随着一维微纳米材料(诸如金属和半导体纳米线,碳纳米管,生物质微纤维等)的应用逐渐普及,人们对其机械性能和力学可靠性的充分了解变得越来越重要。尽管经历了数十年发展,迄今为止,在定量测试单个微纳一维材料方面依旧极具挑战性。近年来,基于微机电系统(MEMS, microelectromechanical system)的微器件已成为在高分辨率电子显微镜或光学显微镜下定量测试一维微纳米材料力学性质的有效工具,然而,这些现有的基于MEMS工艺的力学测试器件大部分基于传统的硅光刻微加工工艺,其制造过程复杂,研发周期长且验证成本十分昂贵。创新研究近期,香港城市大学机械工程系陆洋教授课题组利用先进的微纳3D打印技术,基于先前的设计(美国专利#US8058613B2),研发并制造出可用于测试跨尺度的微纳米线原位力学测试微机械器件(MMD, micro-mechanical device)。研究者们基于面投影微立体光刻的3D打印系统(BMFTM nanoArch P130)制作了一系列微米级的高精度树脂基机械器件,其在外部力学测试仪(作为致动器和载荷传感器)的辅助下实现了在电镜和光镜下的微纳米线原位单轴拉伸测试。该研究工作发表于力学期刊Extreme Mechanics Letters。总所周知,3D打印具有高度定制化的优势,该工作采用有限元法针对测试不同试样的需要,设计和优化不同器件材质及工艺,并可批量并行制造多种不同器件以达到最佳测试性能和结构稳定性。在该论文中,直径大小从纳米级到微米级碳化硅纳米线和锆钛酸铅(PZT)微米线分别在定制打印的MMD上进行了测试,成功展现了该方案的可行性以及高效性。最重要的是,相对于传统的硅基器件试制和生产,基于高精度3D打印的微机械器件甚至微机电器件具有显著的低成本、易制造和高自由度等优势。并且,其客制化特性可极大丰富微纳米力学测试平台的本构材料灵活性和几何设计复杂性。对比于传统硅基器件,基于树脂材料的3D打印MMD能承受更大变形,使微观下的大变形力学测试的研究亦成为可能。此外,相较于硅器件随特征尺寸变大会变得更脆,3D打印树脂基MMD的韧性,刚度和大小有更大的可调控空间,可用于定制测试各种微米和亚微米级材料样品,例如生物原纤维、电纺聚合物纤维、微电子键合线等,极大地填补了目前介于纳米级和宏观高精度力学测试器械之间的一项空白。 香港城市大学机械工程系博士生王月皎和现西安电子科技大学机电工程学院副教授高立波为本论文共同一作。本工作得到香港城大-西电微纳制造联合实验室以及深圳市科技创新委基础研究基金等项目的支持。图文速览图1 高精度面投影微立体光刻3D打印系统及其打印的微机械器件MMD 图2 实验设置及有限元仿真优化设计图3 碳化硅SiC纳米线的原位SEM拉伸测试演示来源:两江科技评论
应用实例
2022.10.27
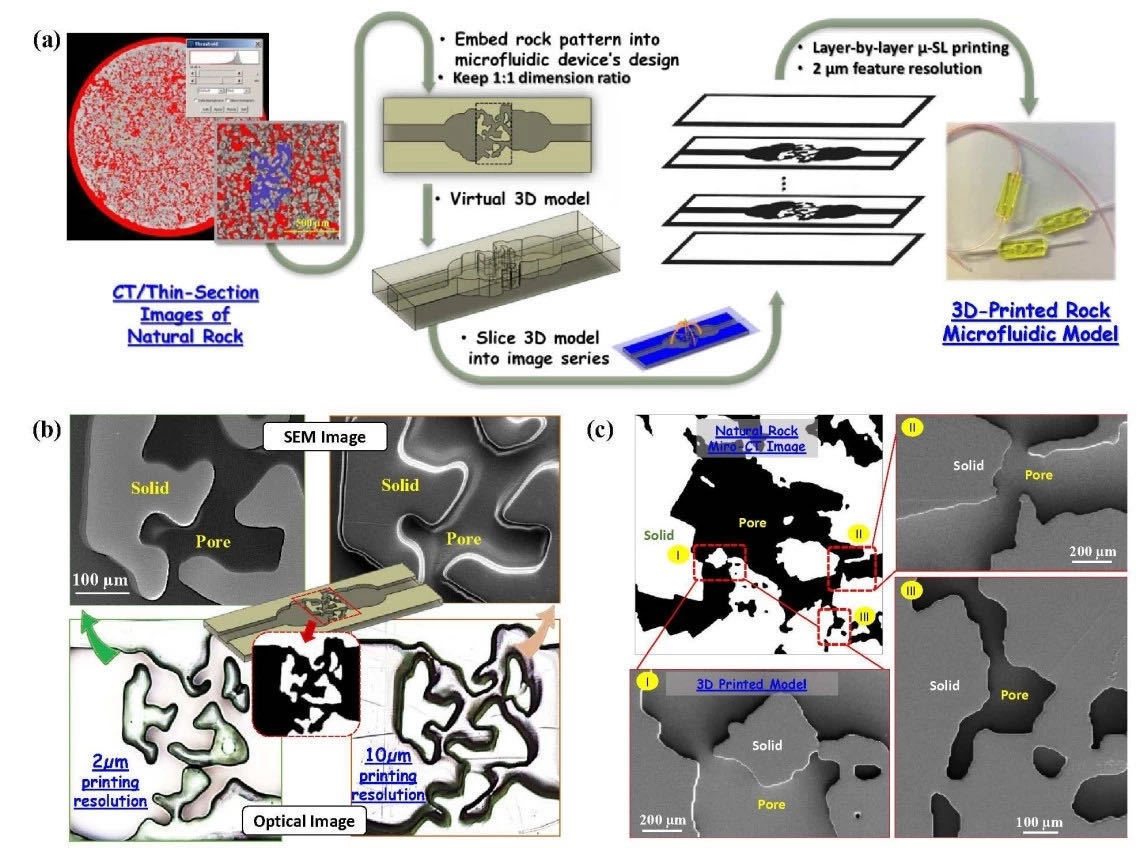
摩方精密具有不同表面润湿性的微尺度3D打印微流控器件
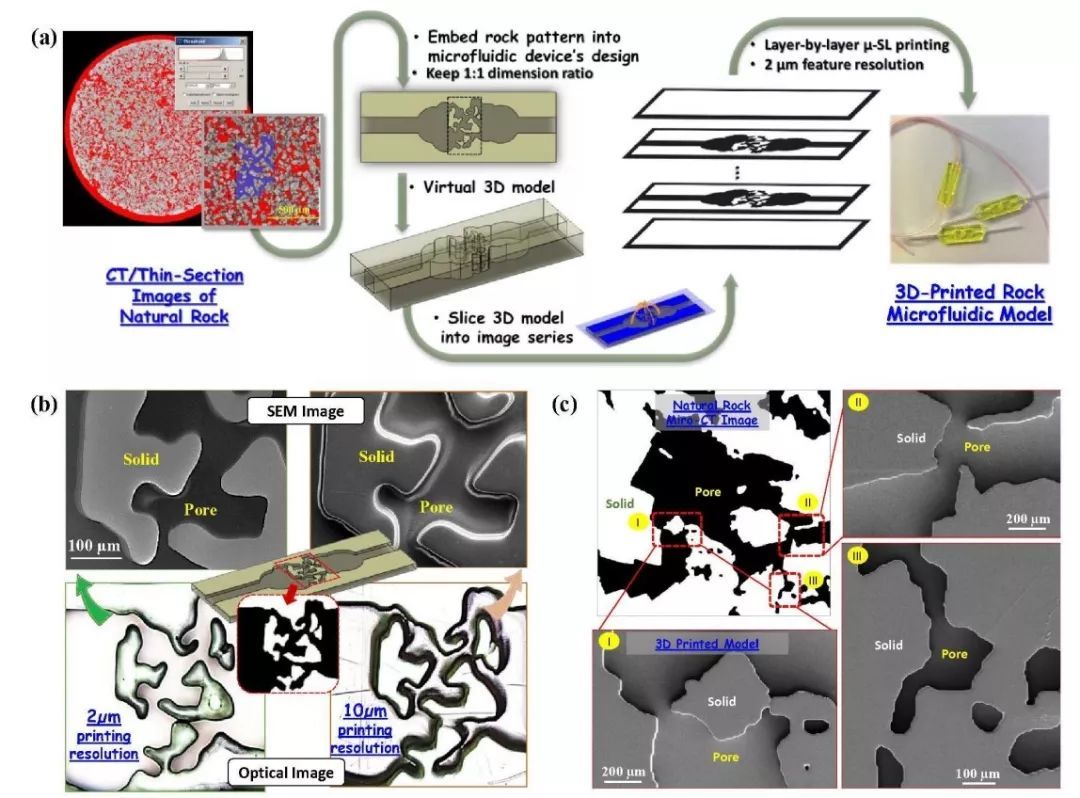
作为微纳3D打印的先行者和领导者,在三维复杂结构微加工领域,重庆摩方精密科技有限公司拥有超过二十年的科研及工程实践经验。摩方精密在微流控应用领域,基于微流控的装置,例如流体连接器和基因测序仪阀门,已使用 PµSL 技术成功实现微流控3D打印。 ---阿联酋Khalifa University的T.J. Zhang教授和Hongxia Li博士,近日在知名期刊《Soft Matter》发表了一篇高质量文章“Imaging and Characterizing Fluid Invasion in Micro-3D Printed PorousDevices with Variable Surface Wettability” 。研究人员在实验过程中使用微纳 3D打印设备,该设备具有2μm分辨率,50mm*50mm的加工幅面,加工微流控器件。这台设备来自重庆摩方精密科技有限公司,型号为nanoArch S130。基于微纳3D打印的微流控器件,结合多相流成像技术,研究微尺度多孔介质中的多相流动。 多孔微流控器件制造的工作流程如图(a)所示,第一步是对薄片图像或微CT扫描图像进行处理(红色部分),然后从处理后的图像中,选择一个区域并将其嵌入微模型设计中(蓝色部分),构建三维立体模型。第二步是使用切片软件将三维模型切成一系列图片,最后是通过2μm精度的微立体光固化3D打印机打印出微流控器件;(b)同一岩石模型在2μm和10μm两种不同打印精度下打印出的表面形貌;(c)打印的岩石模型(打印精度2μm)与微CT扫描图像(扫描精度8μm)的对比;多孔介质中的流体渗透广泛存在于许多应用中,例如油气开采、二氧化碳封存,水处理等。流体渗透的动态过程会受到液体表面张力,多孔介质的表面润湿性,空隙拓扑结构以及其他参数的影响。在这项工作中,研究人员使用2μm精度的微立体光固化3D打印机打印出具有相似复杂孔喉特征的微模型。该模型的内部空隙结构来自于天然多孔介质(例如岩石)的薄片图像或微CT扫描图像。将不同的流体注入表面改性后的微模型中,我们可以借助于模型的高透明性直接在光学显微镜下观察和研究了在各种表面润湿性条件下的动态流体渗透行为。此外,我们还结合光学成像和数值模拟,系统地分析了残留液体分布,并揭示了四种不同类型的残留机制。这项工作提供了一种新颖的方法,通过结合微尺度3D打印和多相流成像技术来研究多孔介质中的微尺度下的多相流动。 致谢:阿联酋Khalifa University的T.J. Zhang教授和Hongxia Li博士参考文献:https://pubs.rsc.org/en/content/articlelanding/2019/sm/c9sm01182j/unauth#!divAbstract官网:https://www.bmftec.cn/links/10
应用实例
2022.10.27

北航《Lab on a chip》封面文章|冯林实验室
大约90%的肿瘤相关死亡可归因于转移瘤的复发。然而,在经过手术切除等初期治疗后,直接进行化疗,往往会造成过度治疗,加速病发。因此,长期监测CTC动态变化并据此调整治疗策略,可防止过度治疗并且可以及时阻止肿瘤转移和复发。因此,CTC检测已成为一种新的诊断和预后的生物标志物,可为癌症治疗提供有价值的指导。物理场与微流控的复合装置可以大大提高单纯依靠芯片微纳结构对CTC进行的筛选。然而,基于这些方法获得的CTC数据与患者预后转移的形成很难被证实。近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授课题组利用声波微流控从手术切除乳腺肿瘤小鼠全血中捕获CTCs,建立一种简单、快速、低成本的术后评价体系,并成功预测了肿瘤转移。图一通过声微流捕获循环肿瘤细胞来预测肿瘤转移 首先,研究团队采用面投影微立体光刻3D打印技术(nanoArch S140,摩方精密)设计制造了一种微流控芯片,芯片底部分布着直径为100μm,高度为80μm的微孔阵列。该芯片封装在厚度为10μm的玻璃片上,通过信号发生器和放大器将信号通过压电陶瓷片传递给微流控,超声信号和微流控通道中的液体在微孔处形成声微流。利用该声流可以对不同粒径的聚苯乙烯小球,肿瘤细胞,卵母细胞和绿眼虫进行捕获,旋转,搬运等多种操作。其次,利用浓度已知的肿瘤细胞对该微流控装置的捕获效率进行评价,实验结果显示,该装置的捕获效率可达96%。再次,对手术切除肿瘤后的小鼠血液进行筛选,并根据CTC数量做出小鼠形成转移的可能性。最后,经过长期观察术后小鼠的转移灶形成情况,验证预测结果。肿瘤转移情况与根据声微流捕获的CTC数量做出的预测一致。图二基于振荡底微腔阵列的细胞分离声射流装置原理及实物图图三基于CTC声流控装置捕获乳腺癌进行肺转移能力的评估该项研究成果获得国家重点研发计划(No.2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持,以“Postoperative evaluation of tumorbased on label-free acoustic separation of circulating tumor cells bymicrostreaming ”为题发表于国际期刊《Lab on a chip》(北京航空航天大学白雪博士,宋斌硕士为共同第一作者)。来源:智能仿生与微纳系统官网:https://www.bmftec.cn/links/6
应用实例
2022.10.25
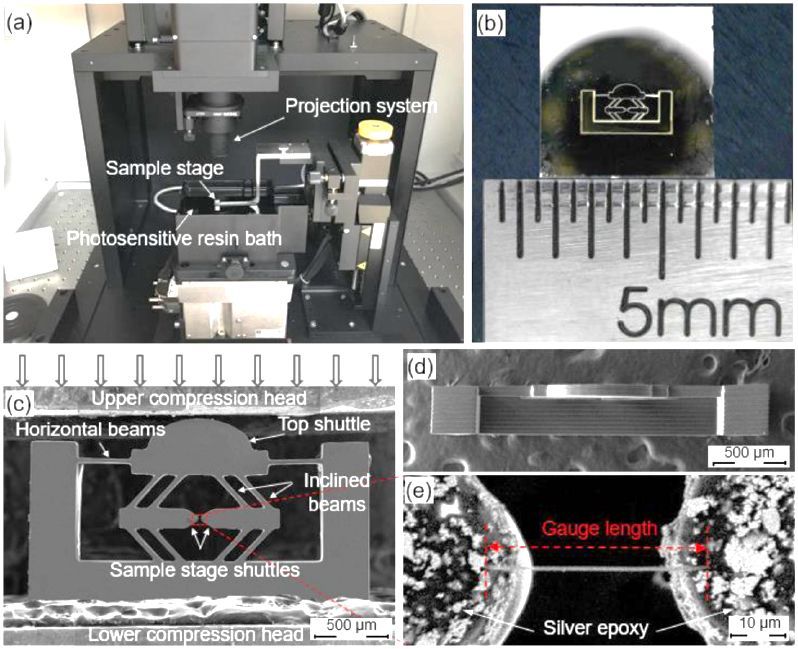
3D打印微机械器件 助力微纳力学表征
研究背景随着一维微纳米材料(诸如金属和半导体纳米线,碳纳米管,生物质微纤维等)的应用逐渐普及,人们对其机械性能和力学可靠性的充分了解变得越来越重要。尽管经历了数十年发展,迄今为止,在定量测试单个微纳一维材料方面依旧极具挑战性。近年来,基于微机电系统(MEMS, microelectromechanical system)的微器件已成为在高分辨率电子显微镜或光学显微镜下定量测试一维微纳米材料力学性质的有效工具,然而,这些现有的基于MEMS工艺的力学测试器件大部分基于传统的硅光刻微加工工艺,其制造过程复杂,研发周期长且验证成本十分昂贵。创新研究近期,香港城市大学机械工程系陆洋教授课题组利用先进的微纳3D打印技术,基于先前的设计(美国专利#US8058613B2),研发并制造出可用于测试跨尺度的微纳米线原位力学测试微机械器件(MMD, micro-mechanical device)。研究者们基于面投影微立体光刻的3D打印系统(BMFTM nanoArch P130)制作了一系列微米级的高精度树脂基机械器件,其在外部力学测试仪(作为致动器和载荷传感器)的辅助下实现了在电镜和光镜下的微纳米线原位单轴拉伸测试。该研究工作发表于力学期刊Extreme Mechanics Letters。总所周知,3D打印具有高度定制化的优势,该工作采用有限元法针对测试不同试样的需要,设计和优化不同器件材质及工艺,并可批量并行制造多种不同器件以达到最佳测试性能和结构稳定性。在该论文中,直径大小从纳米级到微米级碳化硅纳米线和锆钛酸铅(PZT)微米线分别在定制打印的MMD上进行了测试,成功展现了该方案的可行性以及高效性。最重要的是,相对于传统的硅基器件试制和生产,基于高精度3D打印的微机械器件甚至微机电器件具有显著的低成本、易制造和高自由度等优势。并且,其客制化特性可极大丰富微纳米力学测试平台的本构材料灵活性和几何设计复杂性。对比于传统硅基器件,基于树脂材料的3D打印MMD能承受更大变形,使微观下的大变形力学测试的研究亦成为可能。此外,相较于硅器件随特征尺寸变大会变得更脆,3D打印树脂基MMD的韧性,刚度和大小有更大的可调控空间,可用于定制测试各种微米和亚微米级材料样品,例如生物原纤维、电纺聚合物纤维、微电子键合线等,极大地填补了目前介于纳米级和宏观高精度力学测试器械之间的一项空白。 香港城市大学机械工程系博士生王月皎和现西安电子科技大学机电工程学院副教授高立波为本论文共同一作。本工作得到香港城大-西电微纳制造联合实验室以及深圳市科技创新委基础研究基金等项目的支持。图文速览图1 高精度面投影微立体光刻3D打印系统及其打印的微机械器件MMD 图2 实验设置及有限元仿真优化设计图3 碳化硅SiC纳米线的原位SEM拉伸测试演示来源:两江科技评论官网:https://www.bmftec.cn/links/10
应用实例
2022.10.21

西安交通大学张留洋课题组《Optics Letters》:3D打印的基于环偶极子的高性能太赫兹传感器
在各种各样的超表面应用中,太赫兹传感凭借着高灵敏度和太赫兹波的非电离性质为分析物的无损检测提供了强大的潜力,尤其受到了广泛的关注。为持续提高太赫兹传感器的灵敏度,基于多种物理机制,包括Fano共振、连续域束缚态共振和环偶极子共振,科研人员开发了多款太赫兹传感器。其中,环偶极子谐振传感器因其微弱的辐射特性,使得电磁能量在近场范围内受到高度的局域,因此受到广泛的关注。然而,目前的环偶极子谐振传感器的灵敏度受到分析物和局域增强电磁场之间有限的空间重叠的极大限制。此外,加工这些微米级的结构也是一个挑战。近日,基于上述问题,西安交通大学张留洋老师课题组提出了一种面外太赫兹传感器,通过面外结构,增强了光和物质的空间重叠,从而增强传感性能。该传感器通过摩方精密提供的nanoArch S130设备进行了加工,并通过实验验证了传感器的高灵敏度。相关成果以“Highly sensitive terahertz sensing with 3D-printed metasurfaces empowered by a toroidal dipole”为题发表在光学期刊《Optics Letters》上。图 1 (a)三步制备法示意图,包括(1)衬底制备,(2)3D打印,和(3)金属膜沉积;最右边的面板描绘了设计的传感器的原型。(b)所制传感器的SEM图像。沿传感器x轴(c)和y轴(d)的表面轮廓。图1(a)显示了基于面投影微立体光刻(PµSL)3D打印技术(nanoArch S130,摩方精密)的三步制备方法示意图。与传统的微纳制造技术相比,这种方法简单有效,是面外微结构通用制造的实用候选方法。采用这种三步制备方法,成功制备了具有30×30个超分子阵列的太赫兹传感器,其扫描电镜图像如图1(b)所示。为了表征所制作传感器的三维轮廓,分别沿x轴[图1(c)]和y轴[图1(d)]测量了其表面轮廓,数据表明打印样品的测得轮廓总体上与设计模型吻合较好。此外,分别通过阻抗匹配理论(图2)和近场分析、多偶极子散射理论(图3)解释了传感器的共振机理。 图 2 (a)传感器在x偏振和y偏振入射下的模拟(实线)和实验(虚线)反射谱。(b)y偏振入射下传感器阻抗。 图 3(a)归一化散射功率。(b)电场分布(轮廓轮廓)和表面电流分布(箭头)。(c)磁场的分布。在传感器的应用方面,选择了三种类型的粉末——乳糖,半乳糖和葡萄糖——作为检测分析物。首先,将粉末经过适当研磨后均匀撒在传感器上,如图 4(a)显微镜图像所示。然后通过THz-TDS测量了相应的反射谱,如图 4(b)给所示,可观察到半乳糖的共振频率与其他分析物相比有明显的红移。此外,为避免测量误差,采用C扫描获得面积为6×6 mm2的区域的反射谱曲线,分别提取各点对应谐振频率处的强度和谐振频率。然后,随机选择每种分析物的500个点的计算平均谐振频率,重复此过程10次,结果如图 4(f)所示。实验结果表明,所提出的传感器能够准确地检测出葡萄糖、乳糖和半乳糖粉末。 图 4 (a)被分析物粉末覆盖的传感器的显微镜图像。(b)测定的三种分析电解质粉末的反射光谱。(c)有或没有传感器下的乳糖粉末的反射谱。(d)乳糖粉加载时各点电场(传感器)的共振强度和(e)共振频率。(f)三种分析物的频移分布。
应用实例
2022.10.21
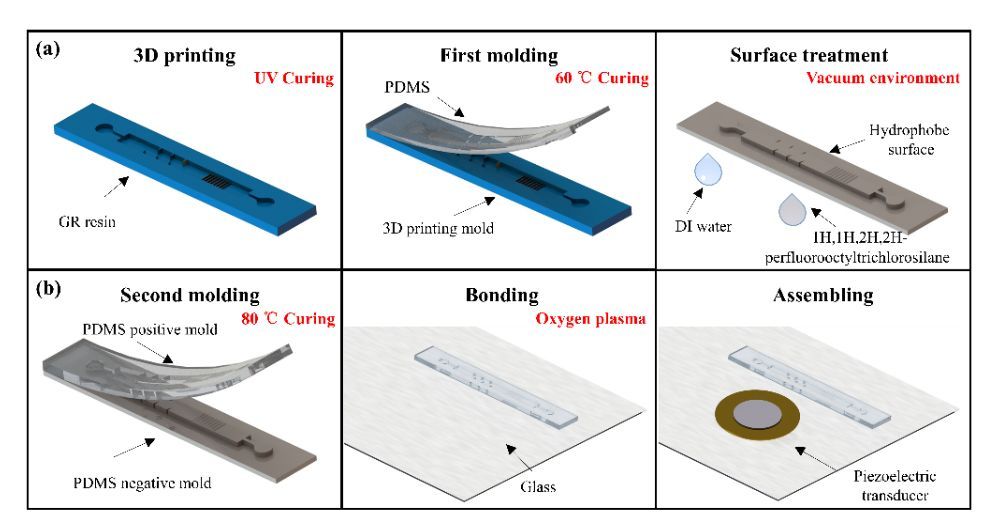
微型尖锐结构在声场激励下实现声流体芯片上非接触、无损伤细胞搬运及三维旋转操作
北京航空航天大学机械工程及自动化学院冯林教授课题组学生宋斌,近日在国际期刊《Biomicrofluidics》发表了一篇文章“On-chiprotational manipulation of microbeads and oocytes using acoustic microstreaming generated by oscillating asymmetrical microstructures”。研究人员在实验过程中使用了深圳摩方材料科技有限公司微尺度3D打印设备S140,该设备具有10um精度的分辨率,94*52*45mm大小的三维加工尺寸。基于该设备加工了尖锐侧边和尖锐底面微结构,通过PDMS二次倒模并与玻璃基底键合形成声流体芯片。该声流体芯片通过正弦信号激励压电换能器振动,从而带动芯片内微结构振动,并在其周围产生局部微声流,最终实现卵细胞的三维旋转。该研究在细胞三维观测、细胞分析及细胞微手术方面有重大研究意义。(声流体芯片制备工艺示意图) (a)图中声流道长度15mm, 深度250μm,最小宽度200μm。槽道内分布着对称的尖锐结构和斜坡陡坎结构:尖锐结构顶角20°,高度250μm;斜坡陡坎斜角28°,高度80μm。声流体芯片制备工艺如上图所示,先通过深圳摩方(BMF)10μm精度的微立体光固化3D打印机S140打印出微米级别的尖锐侧边和尖锐底面微结构(最小尖端20°),再倒模出纯PDMS模具,然后经表面处理之后二次倒模获得的PDMS尖锐侧边和尖锐底面微结构。最后把PDMS二次倒模的结构与玻璃基底键合形成声流体芯片。本研究声流体芯片的实验操作系统如上图a所示,主要观测系统和驱动系统两部分组成。上图b展示了声流体芯片的概念图,由受正弦信号激励的压电换能器振动,带动尖锐侧边和尖锐底面微结构振动,从而在相应的微结构周围产生微漩涡(如上图c所示)。在由微漩涡产生的扭矩作用下,最终实现了细胞的三维旋转。对应的微流道及微结构尺寸如上图d-f所示。细胞三维旋转作为一项基本的细胞微手术技术,在单细胞分析等领域有着重大科学意义和工程意义。本文提出了一种基于声波驱动微结构振动诱导产生微声流以实现细胞搬运及三维旋转的简单有效的方法。细胞旋转的方向和转速均可以通过施加不同频率和电压来实现。本研究以单细胞为操作对象,以微流控芯片为手段,以高通量全自动化多功能微操作为目标,为促进我国在微操作技术领域的发展以及生物医学工程交叉学科的革新,进一步为加强我国微纳制造水平提供系统性方法。(BMFnanoArch®S140 System)官网:https://www.bmftec.cn/links/4
应用实例
2022.10.19
具有不同表面润湿性的微尺度3D打印微流控器件
阿联酋Khalifa University的T.J. Zhang教授和Hongxia Li博士,近日在知名期刊《Soft Matter》发表了一篇高质量文章“Imaging and Characterizing Fluid Invasion in Micro-3D Printed PorousDevices with Variable Surface Wettability” 。研究人员在实验过程中使用微纳 3D打印设备,该设备具有2μm分辨率,50mm*50mm的加工幅面,加工微流控器件。这台设备来自深圳摩方材料公司,型号为nanoArch S130。基于微纳3D打印的微流控器件,结合多相流成像技术,研究微尺度多孔介质中的多相流动。多孔微流控器件制造的工作流程如图(a)所示,第一步是对薄片图像或微CT扫描图像进行处理(红色部分),然后从处理后的图像中,选择一个区域并将其嵌入微模型设计中(蓝色部分),构建三维立体模型。第二步是使用切片软件将三维模型切成一系列图片,最后是通过2μm精度的微立体光固化3D打印机打印出微流控器件;(b)同一岩石模型在2μm和10μm两种不同打印精度下打印出的表面形貌;(c)打印的岩石模型(打印精度2μm)与微CT扫描图像(扫描精度8μm)的对比;多孔介质中的流体渗透广泛存在于许多应用中,例如油气开采、二氧化碳封存,水处理等。流体渗透的动态过程会受到液体表面张力,多孔介质的表面润湿性,空隙拓扑结构以及其他参数的影响。在这项工作中,研究人员使用2μm精度的微立体光固化3D打印机打印出具有相似复杂孔喉特征的微模型。该模型的内部空隙结构来自于天然多孔介质(例如岩石)的薄片图像或微CT扫描图像。将不同的流体注入表面改性后的微模型中,我们可以借助于模型的高透明性直接在光学显微镜下观察和研究了在各种表面润湿性条件下的动态流体渗透行为。此外,我们还结合光学成像和数值模拟,系统地分析了残留液体分布,并揭示了四种不同类型的残留机制。这项工作提供了一种新颖的方法,通过结合微尺度3D打印和多相流成像技术来研究多孔介质中的微尺度下的多相流动。致谢:阿联酋Khalifa University的T.J. Zhang教授和Hongxia Li博士参考文献:https://pubs.rsc.org/en/content/articlelanding/2019/sm/c9sm01182j/unauth#!divAbstract官网:https://www.bmftec.cn/links/10
应用实例
2022.10.19
西安交大张留洋老师课题组《Laser & Photonics Reviews》:3D打印的反射式手性
手性是一种有趣的几何概念,指物体不能通过平移、旋转和缩放等变换与其镜像重合的特性,其应用范围涉及光学、生物学、化学、医药和生命科学等领域。在光学领域,当手性介质被不同旋向的圆极化光激发时,表现出不同的手性光学效应:当左旋圆极化 (LCP) 光和右旋圆极化 (RCP) 光经过手性介质后的透射率或反射率不同,从而显示出圆二色性(Circular dichroism, CD);若这两种光在手性介质中的折射率不同,导致透射光相比于入射光的偏振面发生旋转,则显示出旋光性(Optical activity, OA)。尽管光学手性在自然界中无处不在,但天然材料中的手性响应极其微弱,且难以灵活控制,这严重阻碍了极化相关器件的微型化和集成化应用。由于具有比自然材料高几个数量级的手性光学响应,由人工设计的亚波长单元结构阵列构成的手性超材料/超表面为实现可控手性光学响应提供了一条途径。然而,尽管常见多层手性超表面具有很强的本征光学手性,但其设计过程相对复杂,且加工所需的多步光刻工艺存在技术要求和加工成本高的问题。近日,西安交通大学张留洋老师课题组提出了一种反射式手性超表面的简单、通用的设计方法及其低成本、无光刻的制备策略,该工作与深圳大学范殊婷老师课题组合作完成。通过结合新型微立体光刻技术实现了手性超表面的3D打印,实验测试结果验证了手性响应机理的准确性相关成果以“Chiral Metasurfaces with Maximum Circular Dichroism Enabled by Out-of-Plane Plasmonic System”为题发表于国际期刊Laser & Photonics Reviews上, 影响因子10.9。 图1. 反射式手性超表面通用设计流程示意图对于任意的谐振器,跟随提出的通用设计流程,仅需简单两步即可打破其n重旋转对称性(n > 1)和镜像对称性,从而获得一个具有面外形态的反射式手性超表面。以工作于太赫兹频段的U型手性超表面为例,其圆极化反射谱和圆二色性谱如图2所示。不同的面外形态方向,可获得具有相反手性响应的对映体A和B。 图2. 基于U型共振器的太赫兹手性超表面及其手性响应通过调控超表面的偏置高度可实现对其损耗的调控,根据耦合模理论可知,当其辐射损耗等于耗散损耗时,此时一种圆极化波被近完美的选择性吸收,而另一种圆极化波被非共振地反射,从而可获得最强的圆二色性值(图3(d))。 图3. U型太赫兹手性超表面圆极化反射谱和圆二色性谱通过结合微尺度3D打印技术,提出的手性超表面可由简单的三步工艺制备得到。其中,周期性阵列的面外形态结构采用面投影微立体光刻3D打印技术(nanoArch S130,摩方精密)加工得到。实验结果表明:得益于高精度的微尺度3D打印技术,加工得到的手性超表面具有良好的表面质量和形状精度,测试所得的太赫兹反射谱与圆二色性谱与数值模拟结果较为吻合。 图4. 太赫兹手性超表面制造策略及表征结果 图5. 太赫兹手性超表面实验验证
应用实例
2022.10.17
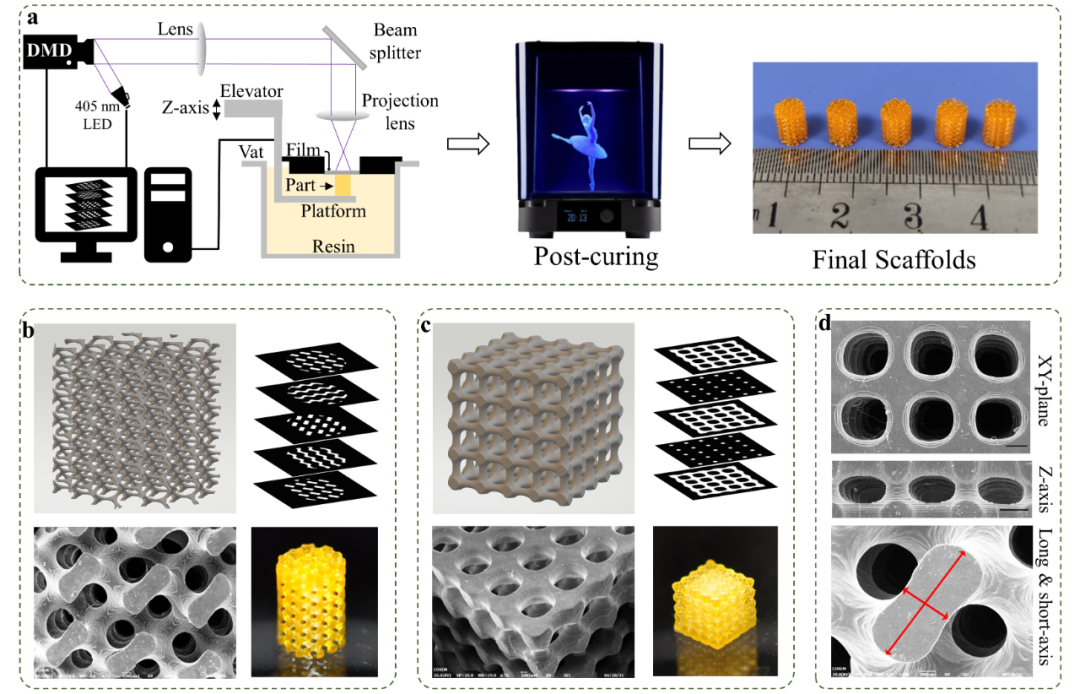
中山大学王山峰团队:一种可超快打印组织工程支架的光固化树脂
近日,中山大学材料科学与工程学院王山峰教授团队创新地使用超支化反应型稀释剂去优化聚富马酸丙二醇酯(PPF)树脂,充分利用了面投影微立体光刻技术的快速制备优势,实现了可降解、无细胞毒性组织工程用多孔支架的超快、高精度打印,同时显著提高支架结构的模量、韧性、和形变回复率。相关成果以“Projection printing of scaffolds with shape recovery capacity and simultaneously improved stiffness and toughness using an ultra-fast-curing poly(propylene fumarate)/hyperbranched additive resin”为题发表在国际著名期刊《Additive Manufacturing》上(Doi:10.1016/j.addma.2021.102446)。该期刊的影响因子为10.998,在工程-制造领域中排名第一。PPF是一种可注射、可光固化、可降解不饱和聚酯,在骨组织工程上具有优异应用前景。在以往使用PPF树脂和立体光刻技术打印组织工程支架的报道中,富马酸二乙酯(DEF)是作为反应型稀释剂来调节树脂粘度以获得流动性和可打印性,然而在固化速度和所制备支架结构的力学性能上需要提高。在此论文中,经筛选后超支化聚酯丙烯酸酯(HPA)作为反应型稀释剂与PPF形成新型光固化树脂,并与PPF/DEF树脂在流变性质、热性能、固化速度、固化深度、临界固化能量、打印速度、打印精度,以及打印出的多孔支架结构的力学性质上进行全面的对比研究。实验结果表明HPA可有效降低PPF的玻璃化转变温度和粘度,以获得打印时的流动性,同时,HPA极大加速了PPF的光交联过程。PPF/HPA树脂固化需要的临界能量极低,仅为2.1 mJ/cm2,低于PPF/DEF树脂的六分之一。在保证高精度的前提下,使用面投影微立体光刻3D打印技术快速成型的特性最为亮眼。对于PPF/HPA树脂,每打印一层曝光时间仅为0.1-2 s,比目前已公开报道的使用紫外光交联方法的3D打印技术至少缩短了一半。在50微米的分辨率下,PPF/HPA树脂的打印速度可达18 cm/h,而PPF/DEF树脂的打印速度仅为其五分之一。得益于更完善的交联网络,使用PPF/HPA树脂打印的支架结构比PPF/DEF树脂支架具有更低的收缩率、更高的刚度和韧性,以及更好的形变回复能力,具有4D打印的特性。初步体外细胞实验也证明这些支架的细胞相容性好,为在支持骨组织修复上使用奠定了基础。图1 面投影微立体光刻技术快速制备PPF/HPA支架图2 PPF/HPA、PPF/DEF两种树脂的打印速度对打印分辨率和光强的依赖关系图3 PPF/HPA支架结构的优异力学性能论文为中山大学材料科学与工程学院独立完成,第一作者为硕士研究生利文杰,第二作者为博士研究生成肖鹏,其导师王山峰教授、王苑讲师为共同通讯作者。该研究得到中国国家自然科学基金(51973242)、中山大学“百人计划”启动经费、广州市科技计划重点项目(201704020145)、和广东省基础与应用基础区域性联合研究计划(2020A1515110674)的支持。原文链接:https://doi.org/10.1016/j.addma.2021.102446 官网:https://www.bmftec.cn/links/10来源:高分子科技
应用实例
2022.10.14
公司名称: 摩方新材
公司地址: 广东省深圳市龙华区红山6979商业区26栋5楼 联系人: 黄先生 邮编: 518110 联系电话: 400-860-5168转4666
仪器信息网APP

展位手机站