
 关注
关注
已关注

![]() 已认证
已认证
粉丝量 0
400-860-5168转2623
仪器信息网认证电话,请放心拨打
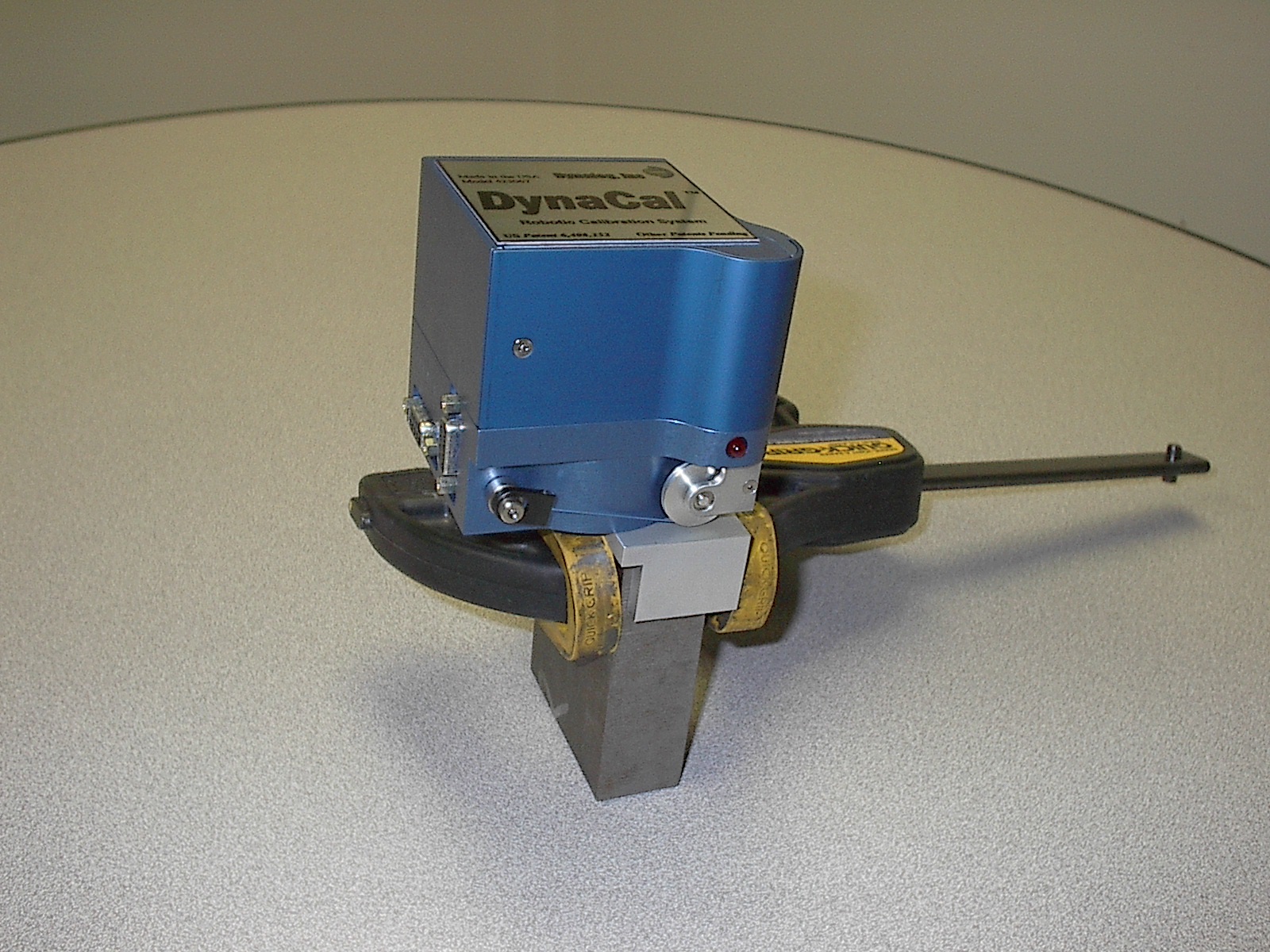
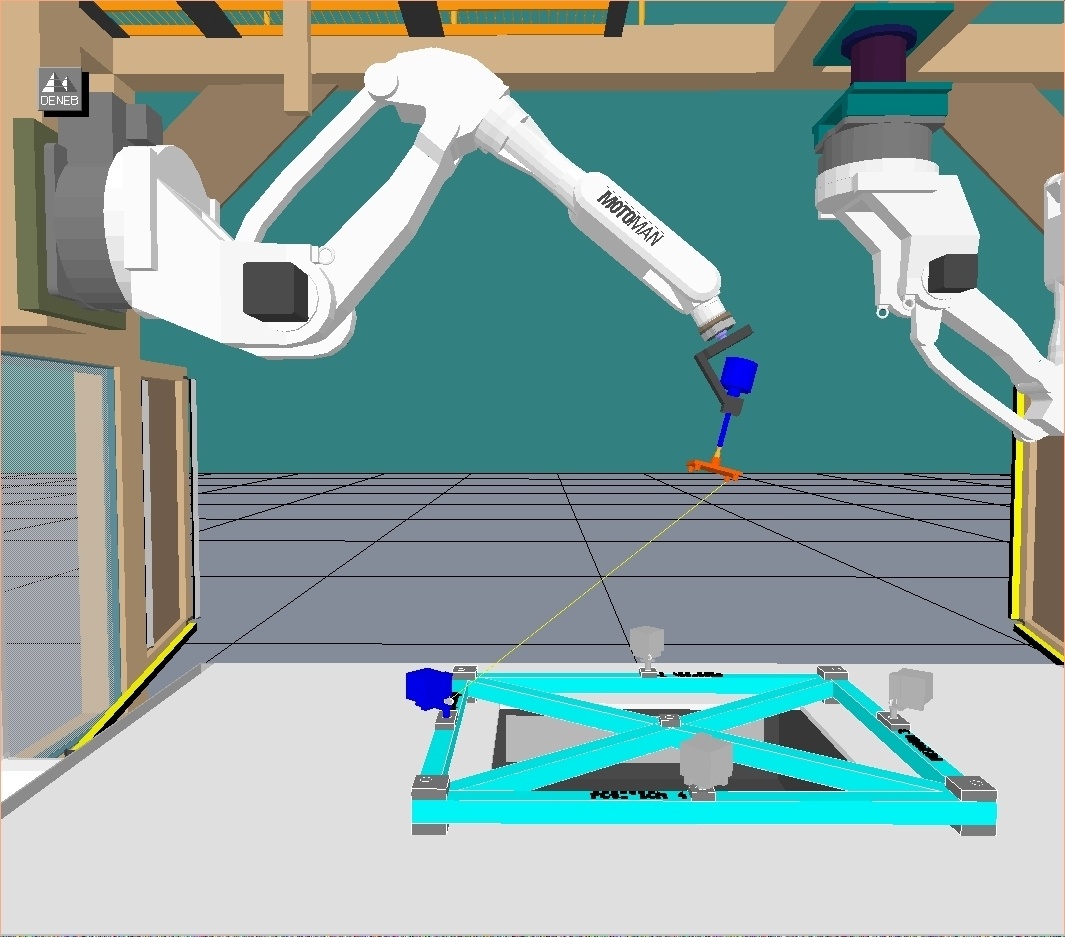
其它工程控制DC的工作原理介绍
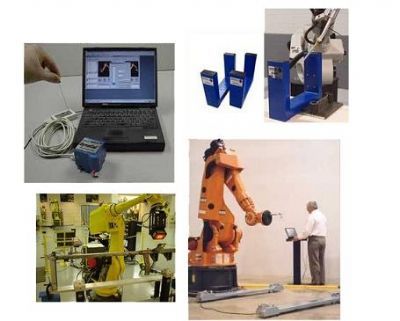
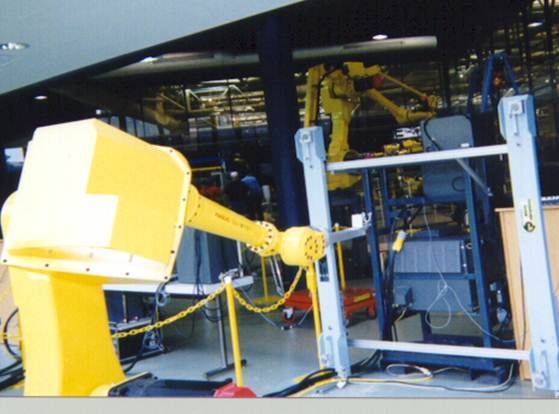
其它工程控制DC的使用方法?
DC多少钱一台?
其它工程控制DC可以检测什么?
其它工程控制DC使用的注意事项?
DC的说明书有吗?
其它工程控制DC的操作规程有吗?
其它工程控制DC报价含票含运吗?
DC有现货吗?

上海沃埃得贸易有限公司
公司地址
上海市闸北区共和新路3699号共和国际A1707
客服电话


公司名称: 上海沃埃得贸易有限公司
公司地址: 上海市闸北区共和新路3699号共和国际A1707 联系人: 朱云国 邮编: 200032 联系电话: 400-860-5168转2623
仪器信息网APP

展位手机站