
 关注
关注
已关注

![]() 已认证
已认证
粉丝量 0
400-860-5168转2623
仪器信息网认证电话,请放心拨打

其它工程控制AutoCal的工作原理介绍
其它工程控制AutoCal的使用方法?
AutoCal多少钱一台?
其它工程控制AutoCal可以检测什么?
其它工程控制AutoCal使用的注意事项?
AutoCal的说明书有吗?
其它工程控制AutoCal的操作规程有吗?
其它工程控制AutoCal报价含票含运吗?
AutoCal有现货吗?

更多![]()
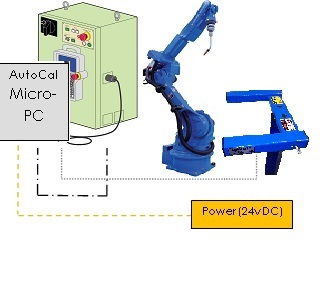
机器人本体校准成功应用案例
制造商们越来越依赖工业机器人,来提高生产过程中所需的灵活性和适应性。尽管如此,让这些机器人高效、精准地执行他们的生产任务,需要花费大量时间和精力去手动编程,从而导致灵活性丧失。而DynaCal-lite机器人标定系统正是针对机器人应用过程中精度偏离而研发的一种解决方案。 实际生产出来的机器人与设计的机器人存在某些偏离,从而导致机器人在实际应用过程中精度达不到要求。通过校准机器人的DH参数(机器人TCP点、home点、连杆长度、机器人各轴夹角、检测机器人关节齿轮间隙、减速比等,并上传控制器进行补偿)来提高机器人本体精度以至于适合更多高精度应用。
384KB
机器人在线检测成功应用案例
DynaFlex 是汽车白车身在线检测系统:主要针对汽车白车身的孔,插槽,螺钉,螺母,边缘,轮廓,表面点,表面平整度等在线检测,系统可以在40秒内完成对整车的全检。检测每个点只需要3秒钟。另外:我们系统也可以检测汽车零部件,例如:车门、车架、引擎盖等。
384KB
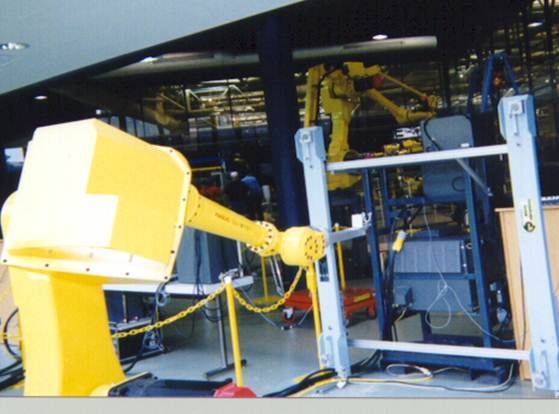
机器人标定系统成功应用案例
DynaCal-lite机器人标定系统消除了任何机器人“实际制造”和“标准设计”安装中遇到的任何差异。有了这个系统,设计机器人的整套自动化技术就变成可能,从而使得新的和既有生产线的启动、修复、更改和更新变得快速和精确。其具体功能有:校准零点精度、校准连杆长度、校准转角角度、校准平行度、校准TCP 中心点精度、校准机器人基座、校准机器人减速比、校准机器人耦合比等。
533KB
机器人测试校准解决方案
工业机器人运动学测试校准是机器人研究的重要内容,工业机器人测试校准是一个集建模、测量、机器人实际参数辨识、误差补偿实现于一体的过程。在机器人产业化的背景下有重要的理论和工程意义。
266KB
机器人校准标定报告
校准机器人的DH参数(机器人TCP点,home点,连杆长度,机器人各轴夹角,检测机器人关节齿轮间隙,减速比…….并上传控制器进行补偿)来提高机器人本体精度适合更多应用。
212KB
机器人TCP点校准实验报告
由于机器人的各种应用,机器人的最终使用精度最终都会落实到机器人末端执行器工具坐标TCP点上,即为夹具点,那么我们需要来测试此中心点在一直的操作中会产生的这些偏差,作为我们判断一个机器人的好坏。
162KB
温度对机器人影响解决方案报告
机器人会由于自身发热和环境温度变化而产生精度偏移,由于机器人各种应用的复杂性和多变性,我们需要测试机器人随环境温度的变化其精度的变化,来得到一个对于此款机器人温度偏移的记录及补偿方案。
417KB
机器人综合性能评估报告
测试机器人的综合性能和各个精度参数,本测试内容参照部分ISO9283标准:机器人点和轨迹的准确度及重复定位精度。
191KB
上海沃埃得贸易有限公司
公司地址
上海市闸北区共和新路3699号共和国际A1707
客服电话


公司名称: 上海沃埃得贸易有限公司
公司地址: 上海市闸北区共和新路3699号共和国际A1707 联系人: 朱云国 邮编: 200032 联系电话: 400-860-5168转2623
仪器信息网APP

展位手机站