
 关注
关注
已关注

![]() 已认证
已认证
粉丝量 0

400-803-3696
仪器信息网认证电话,请放心拨打
本是同根生,相煎何太急?——论SiPM vs SPAD在激光雷达应用场景上优劣势
问题提问的角度不同,但是聚焦的核心无非就是:SiPM和SPAD是什么,它们俩的使用区别以及基于两种产品研发出来的雷达模块的差异。进一步就是要做激光雷达,我要做什么样子的路线选择,要选择使用激光雷达,面对两种主流方案,我该怎么选择的问题。
为了帮助行业朋友更好的理解这两个器件,我们决定出一篇较为详细的对比文字,期待可以为行业同仁更清楚的理解这两个产品类型,做出一点点贡献。
本文的目标受众是,对SiPM和SPAD之间的差异还有疑惑,或者对它们双方的差异到底是哪里不甚明了的朋友。芯片行业专家和同行可以快速浏览或直接略过。毕竟,在当下的环境,用有限的时间投入到自身差异化竞争策略,进一步争取做出非同质(不内卷)技术和产品才是每一家企业发展的王道。那么,请跟我们一起去探求SiPM和SPAD的差异吧。

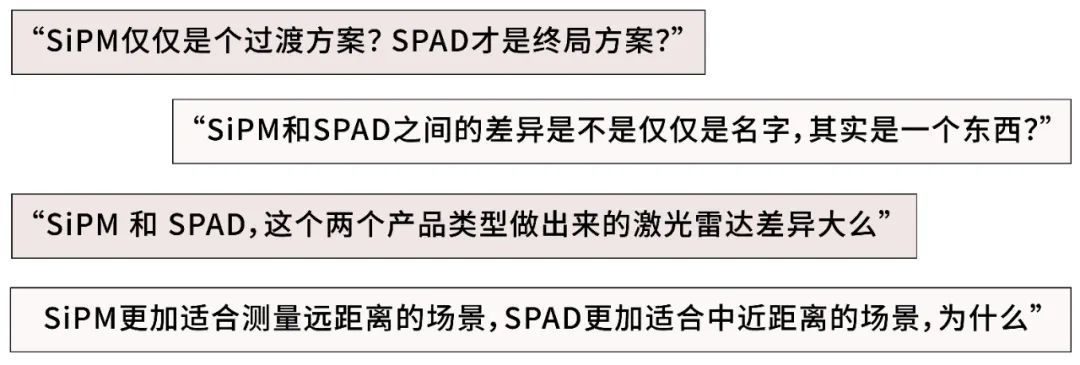
SiPM:全称Silicon Photomultiplier,这个名字最早从哪里出来的呢?作为单光子探测器的鼻祖产品,光电倍增管(Photomultiplier简称PMT)可谓是一个划时代的标志。这个产品是基于真空光电子技术,通过光电阴极的光电转换叠加后续倍增级放大,实现单光子事件检出的一个光电探测器产品。随着Si半导体技术和材料的演进,半导体器件也逐步具备了这个单光子级别的检出限,为了在大型医疗诊断装置-PET(Positron Emission Tomography ,即正电子发射断层扫描仪)对光电倍增管(photomultiplier)形成冲击和替换,就形成了硅基(Si)光电倍增管(PM)的名称。它的形态就是在盖革模式下运行的多个雪崩光电二极管(APD) 像素的阵列集合。从左到右,逐级分解的样子如下,它是多个盖革模式APD的并联集合,由于每一个盖革APD都具备光子检出能力,同时多个并联就具备的同时检出多光子幅度的检出能力(也可以理解为动态范围,同时间检出多少个光子量的能力)。
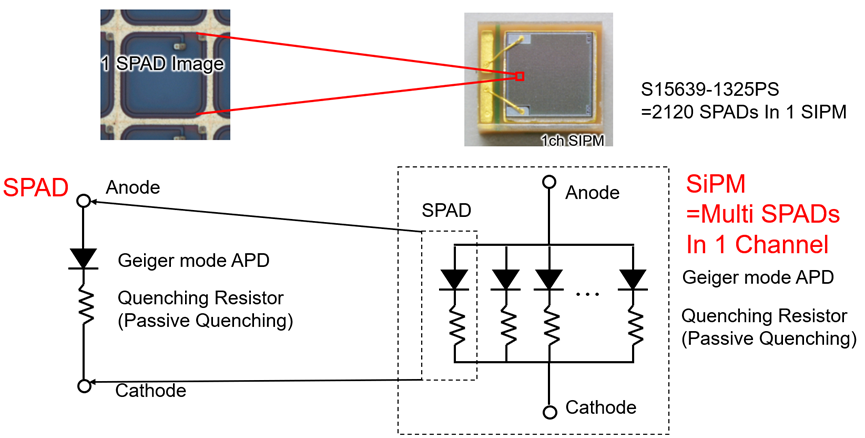
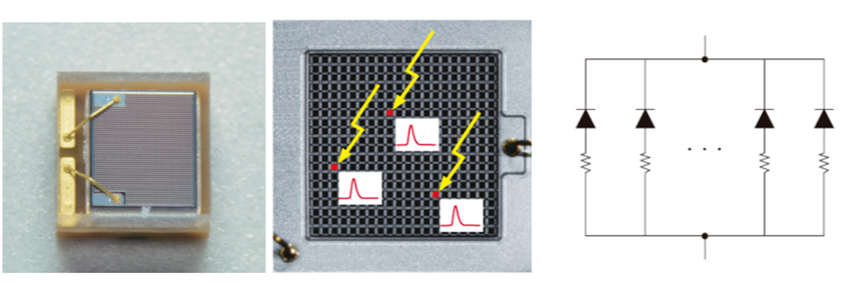 图1 上述图例来源:滨松S15639-1325PS,COB封装1通道SiPM,左图=实物产品图片,中间=放大版结构图,每一个点都是盖革模式APD,右图=等效的结构;简单来说,S15639-1325PS作为单通道SiPM,它内部并联了2120个盖革模式的APD,并汇总到一路进行输出
图1 上述图例来源:滨松S15639-1325PS,COB封装1通道SiPM,左图=实物产品图片,中间=放大版结构图,每一个点都是盖革模式APD,右图=等效的结构;简单来说,S15639-1325PS作为单通道SiPM,它内部并联了2120个盖革模式的APD,并汇总到一路进行输出

SPAD:Single Photon Avalanche Diode,它是一个工作在盖革模式下的雪崩光电二激管APD(Avalanche Photo Diode);从名称上看,1个SPAD=1个APD进入盖革工作区域,单独1个SPAD仅仅输出的结果就是“无光子=0”或者“有光子=1”,如果1个SPAD进入2个或者多个光子,它也只能输出“有光子=1”的结果。但是自然界的光有强弱,强光环境下,为了获得多光子事件的信息,一般会把多个SPAD分成小组(binning),比如3*3(3横3纵)9个SPAD 作为一组进行使用,这样一个小组就具备了0-9的输出的组动态范围。
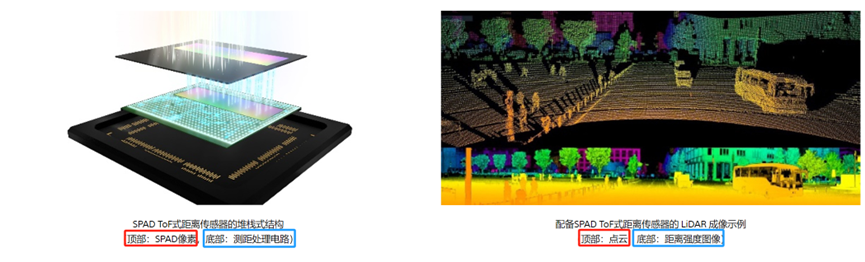 图2 上述图例来源 日本SONY公司开发的SPAD SOC产品的结构和DEMO点云展示图
图2 上述图例来源 日本SONY公司开发的SPAD SOC产品的结构和DEMO点云展示图  图3 IMX459芯片简要规格书
图3 IMX459芯片简要规格书 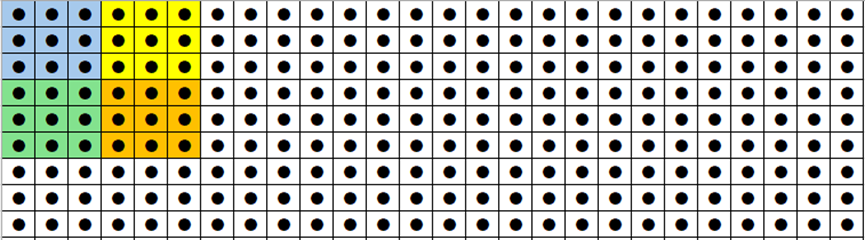
图4 上图每个颜色所代表的3*3都是基于SPAD的工作组,黑色中心表示输出电极,输出电极和SPAD像素数量一一对应。假设把3*3的一个区域可输出的信号合成1个统一读出,那它本质上等同于由9个SPAD构成的单通道SiPM。SPAD和SiPM的结构关系可以参考下图。

我们进一步看一下SiPM和SPADs对信号处理的过程。
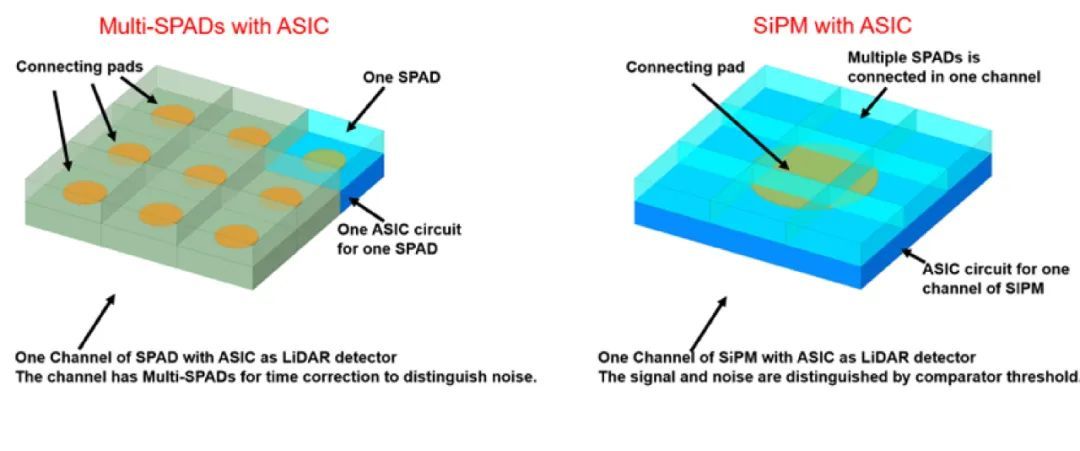 图6 SPAD和SiPM 感光层和电子学对应关系图
图6 SPAD和SiPM 感光层和电子学对应关系图 图6中左侧的SPADs依靠出厂配置好的电子学部分的处理能力,由于单独1个SPAD被激发有可能是噪声干扰,需要在一个组内识别至少2个像素以上(可以更多)的SPAD被同时激发的时候才可以被认为的真的信号。
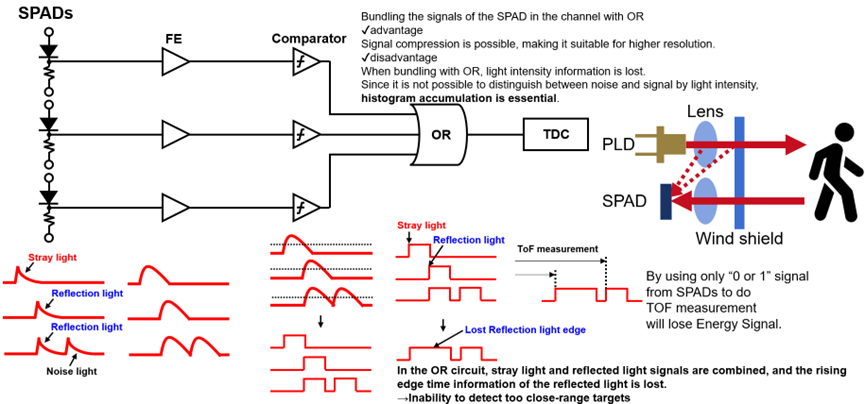
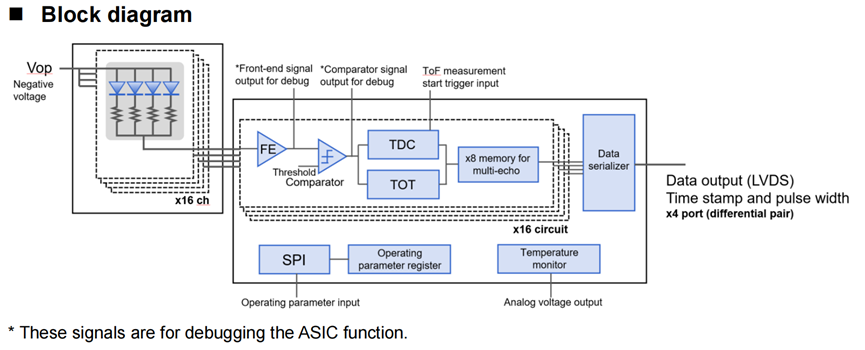
① 3路SPAD比较器分别识别该路SPAD是否接到回波光。通过内置的时间校正电路将接收到回波信号时间与相邻信道进行比较。当同时多个SPAD产生信号的时候,被认为是有真实的信号,时间校正电路中同时被激发SPAD数量可配置。
② 当多个SPAD在同一时间检测信号时,这些信号视为信号。从其他通道延迟的信号被认为是噪声;
③ 信号的时间用高精度TDC来测量。
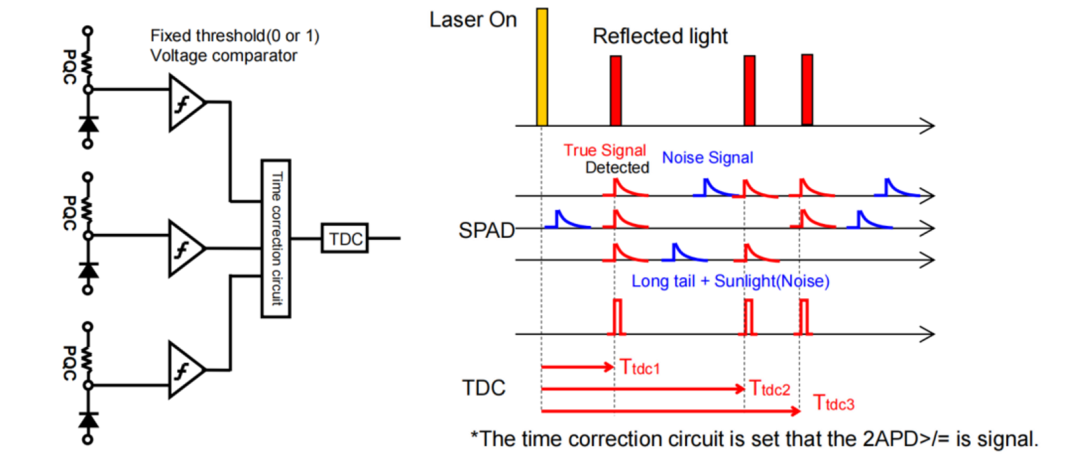
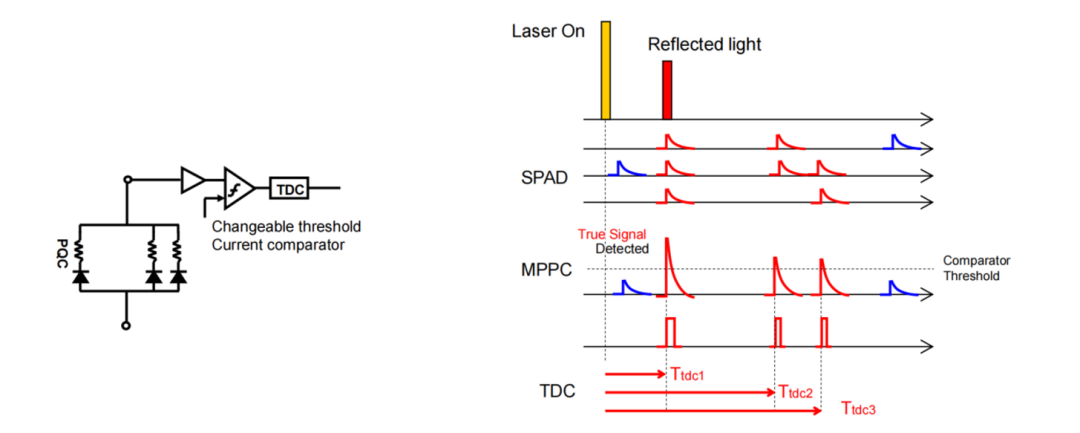
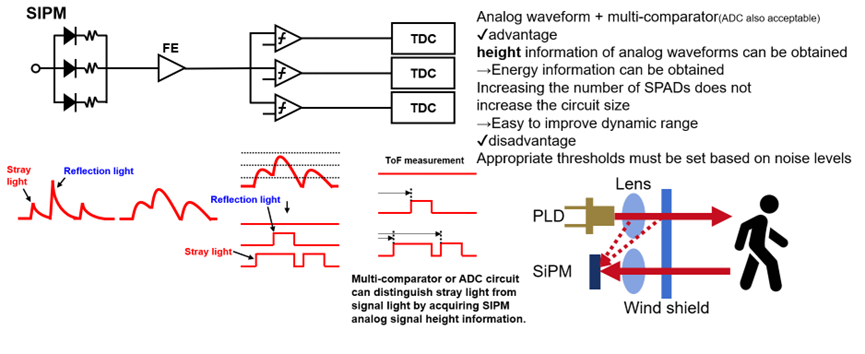
图8 SiPM信号读出原理图



常见问题1: 恢复时间(Recovery time)
疑惑:SPADs相对SiPM恢复时间更快?恢复时间越快越好?
解惑:如下
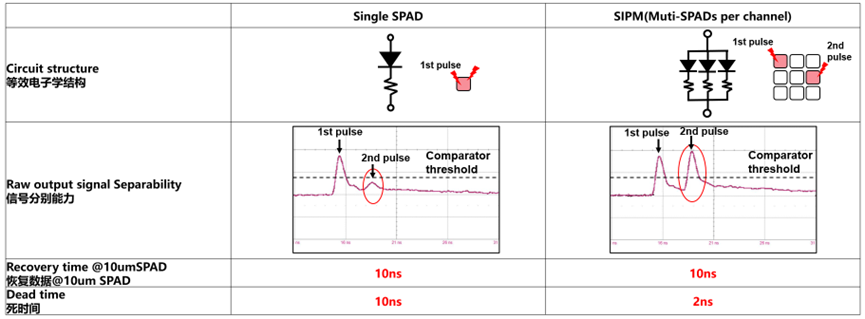
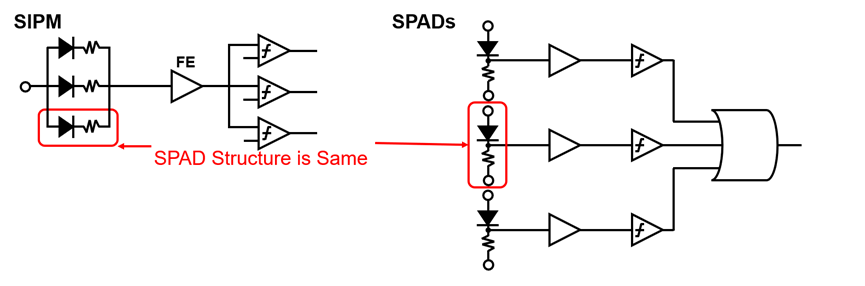 图9 左侧是SiPM方案典型电路构成,右侧是SPADs方案典型电路构成
图9 左侧是SiPM方案典型电路构成,右侧是SPADs方案典型电路构成 从电子学电路角度,SPADs和SiPM在使用方式上,最本质的区别在于从一定数量的SPAD像素中收集到的信号是以数字的方式进行合并,还是以模拟的方式进行合并,没错,这就是用法上唯一的区别;
单通道SPAD=1ch盖革模式的APD的构造一模一样;
如果增益Gain是一样的,那么恢复时间Recovery Time本身就是一样的;而不是说天然的SPADs本身就比SiPM具有更好的恢复时间。从参数上看,等增益的SiPM和SPADs的恢复时间是一样的。
那么恢复时间是不是越快越好?理论上是,但是实际上我们会遇到一个Latching问题。
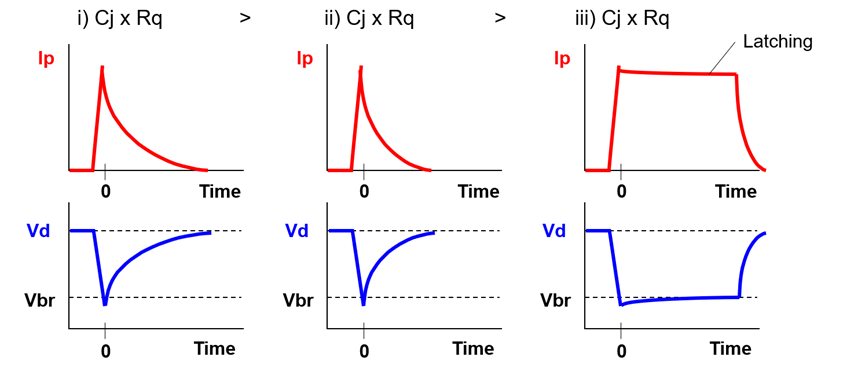
当恢复时间过,很容易引发图10中右侧的问题,导致盖革状态无法猝灭或解除。持续有电流输出,同时节温升高,导致Vbr和Vex改变。
故SPAD中的Rq的配置需要考虑到Latching问题。故此恢复时间不一定越快越好,过快则发生Latching问题的概率也就越大。如何配置考验每个厂家的设计思路和对自己器件的理解。
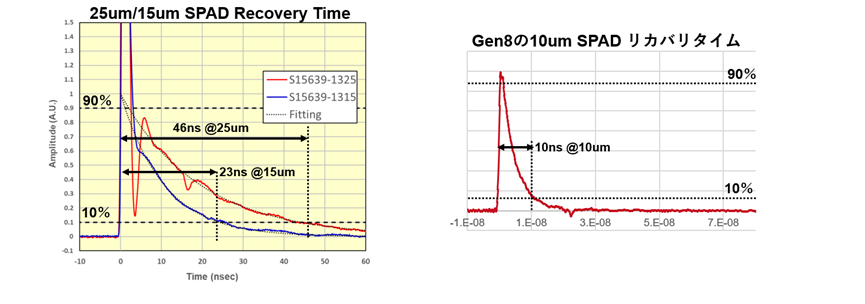
常见问题2:SPAD的尺寸在恢复时间中的角色
疑惑:恢复时间的关系和SPAD的尺寸有强相关性?
解惑:是的!
常见问题3:探测器死时间 “Dead Time”
疑团:恢复时间≠死时间,恢复时间=死时间?
解惑:如下
常见问题4:SPADs和SiPM对杂散光和信号光的分离能力
疑惑:为什么SPADs在近距离盲区检测上容易出现不准的情况?
解惑:如下
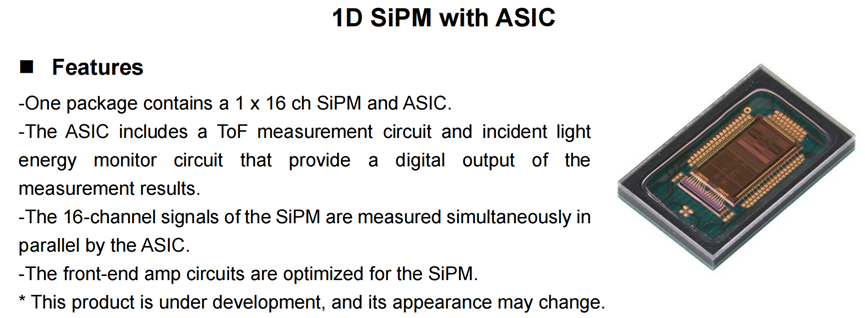
常见问题5:SPADs和SiPM集成度
疑惑:SPADs的产品形态是SOC集成度高的模式,比SiPM更高集成。
解惑:从一般使用模式上看,是对的!对深度SiPM玩家,不一定。
常见问题6:SPADs和SiPM对用户使用价值
疑惑:SPADs的产品形式,比SiPM更对用户友好?
解惑:适合不同的体量的公司,以及商业模式壁垒不同。
参考资料:
Sony to Release a Stacked SPAD Depth Sensorfor Automotive LiDAR Applications, an Industry First*1Contributing to the Safety and Security of Future Mobility with Enhanced Detection and|News Releases|Sony Semiconductor Solutions Group (sony-semicon.com) ADAS-Lidar|索尼车载IMX459激光雷
更多![]()
震撼发布!革新LDLS光源新品,引领高性价比半导体量测新纪元
厂商
2024.09.06

滨松中国2025届校园招聘正式启动
厂商
2024.09.06

走,和滨松一起探索2024年深圳CIOE的精彩!
厂商
2024.09.04

"带宽":放大器性能的关键指标解析
厂商
2024.08.28
